- @AylKfTscDFw
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
基于大语言模型的低碳电力市场发展应用前景(LLM示例课题)这篇文章探讨了在“双碳”目标背景下,低碳电力市场面临的机遇与挑战文章的核心是探讨大语言模型(LLMs),如GPT-3、BERT等,在低碳电力市场中的潜在应用,包括电源结构调整、电力需求预测、风险预警等方面文章的亮点在于,LLMs能够通过提示语设计、微调和语义嵌入等技术,有效适应电力领域的专业化需求特别是,LLMs在处理电力系统中的复杂性、非
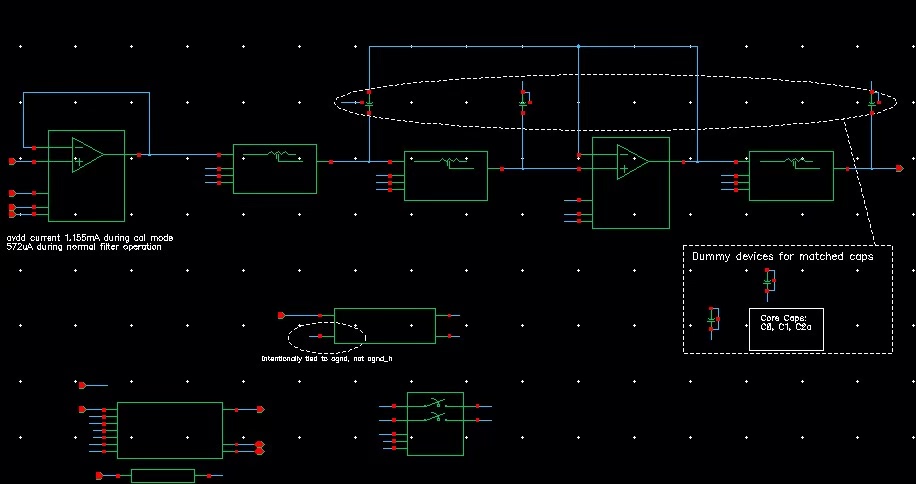
看这个有源三阶滤波器,重点在Rtrim电阻阵列——这货可是相位噪声的克星。照着这个做版图,流片回来相位噪声实测-116dBc/Hz@1MHz offset,比没加dummy的设计改善了3dB。极好锁相环电路,fractional -N PLL,2.4G用于蓝牙。极好锁相环电路,fractional -N PLL,2.4G用于蓝牙。2、原理图系统完整,没版图,但有关键处版图的dummy提示。2、原理
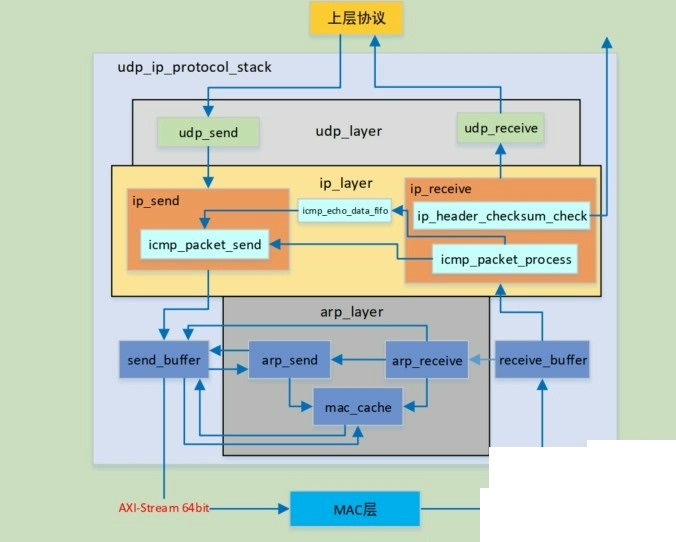
纯verilog逻辑udp,arp,imcp千兆网万兆网,支持各种fpga 平台送仿真文件搞FPGA的兄弟应该都懂,直接拿现成IP核搭网络模块虽然省事,但总感觉少了点硬核操作的快乐。最近在Xilinx和Intel全家桶上折腾了一波纯Verilog实现的UDP/ARP/ICMP协议栈,支持千兆万兆切换,代码全开源还带仿真套餐,今天给大伙唠唠实现细节。
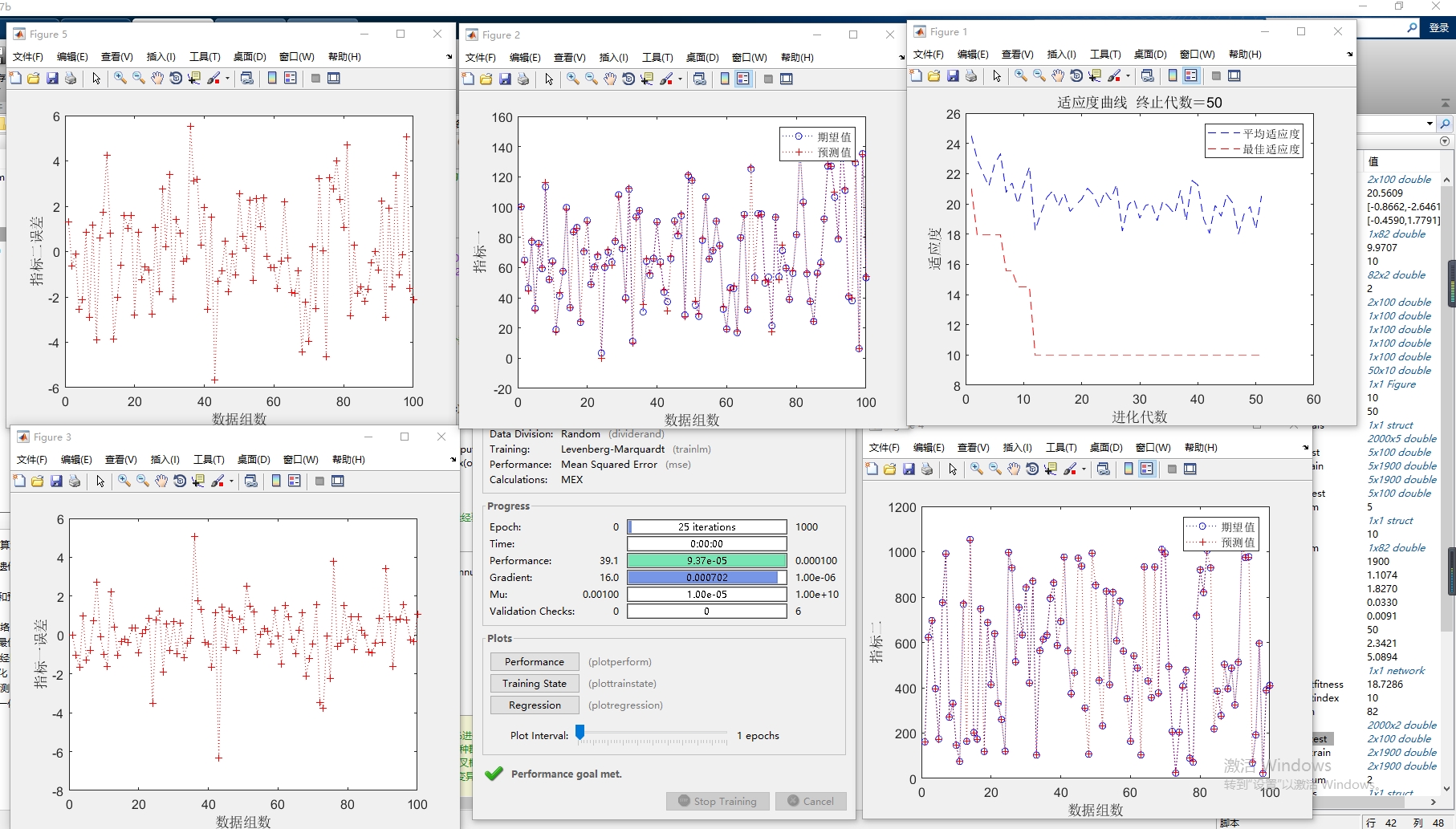
本文介绍一种结合遗传算法(Genetic Algorithm, GA)与反向传播神经网络(Back Propagation Neural Network, BPNN)的混合智能预测模型。该模型专为多输入、双输出的回归预测任务设计,适用于如工业过程控制、金融指标预测、环境参数建模等场景。通过遗传算法对BP神经网络的初始权值与阈值进行全局优化,有效克服了传统BP网络易陷入局部极小值、训练结果对初始参数
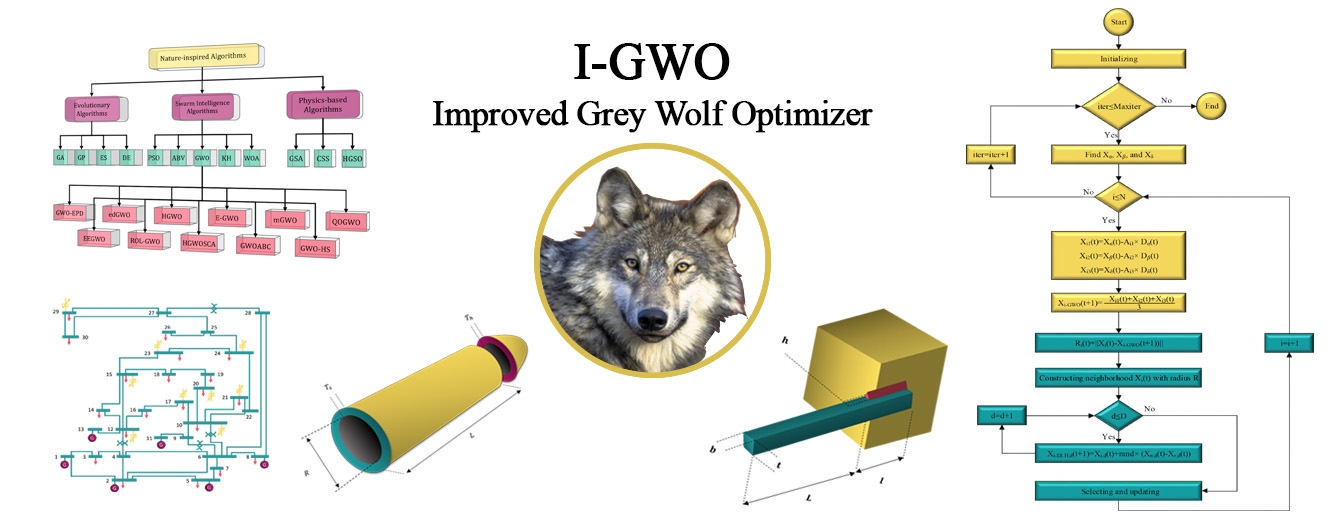
本系统通过引入混沌初始化与DIH局部混合策略,显著提升了灰狼优化算法在SVM参数优化任务中的性能表现。其设计兼顾理论创新与工程实用性,不仅在标准数据集上展现出优越的分类精度与收敛稳定性,也为复杂机器学习模型的自动化调参提供了一套高效、可扩展的解决方案。对于追求模型性能极致优化的开发者与研究者而言,该实现具有重要的参考与应用价值。IGWO-SVM:改良的灰狼优化算法改进支持向量机。采用三种改进思路:
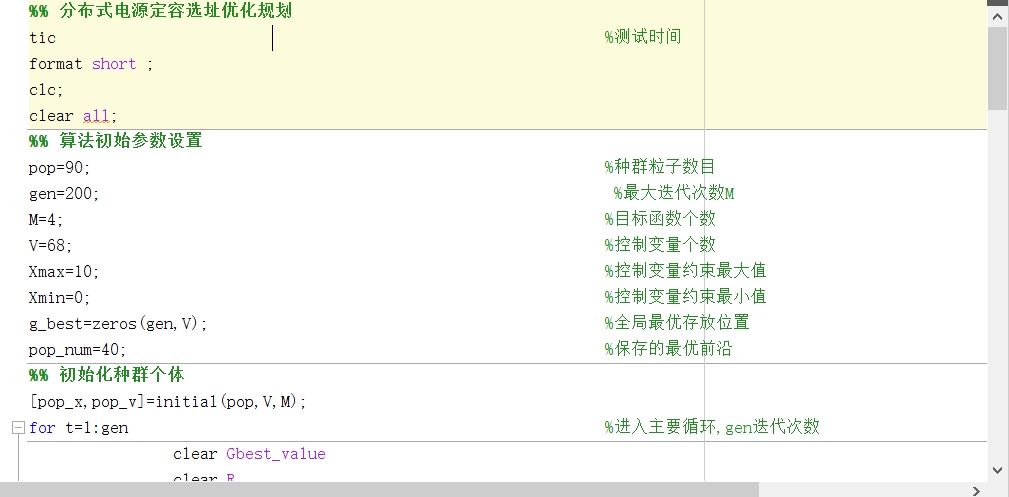
提供的 NSGA-II 代码严格遵循原始算法逻辑,通过模块化设计实现了“优化-可视化-决策”的完整流程,且内置配电网储能优化案例,兼具理论严谨性和工程实用性。该代码不仅可直接用于储能优化问题,还可通过修改目标函数适配各类多目标优化场景(如机械设计、路径规划、机器学习超参数调优)。开发者在使用时需重点关注决策变量定义、目标函数适配和参数调优,若涉及约束问题,建议采用“约束支配”机制替代惩罚函数,以提
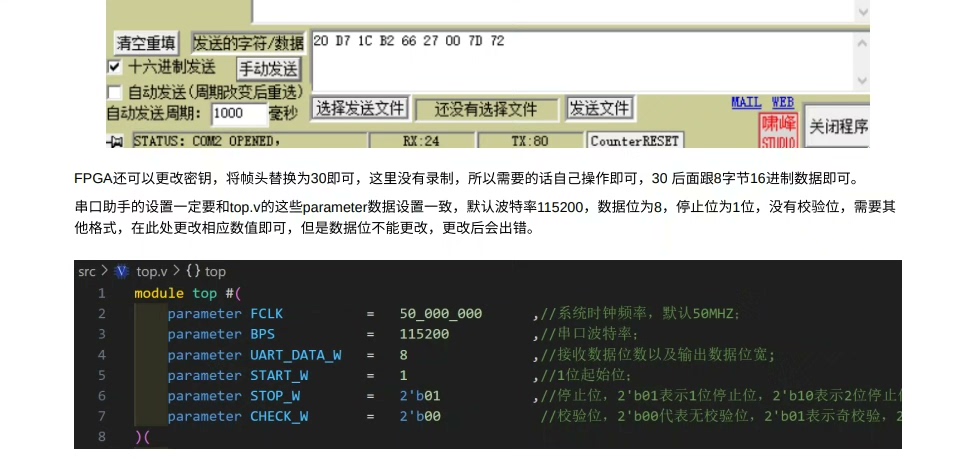
基于fpga的DES加解密算法。利uart串接收PC端发送的数据,根据数据类型,对数据进DES加密或者解密处理。将处理的数据通过uart传回PC端。可以通过上位机对64位密钥进行设置,另外加解密模块是独立的,如果需要,完全可以加入其他模块,对数据进行加解密操作。提供完整设计文档,可以提供上板验证。在现代数字通信领域,数据的安全传输至关重要。DES(Data Encryption Standard)
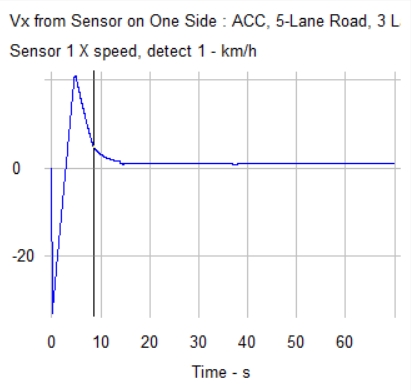
通过MPC、Carsim和Matlab的联合应用,我们可以实现一个高效且精确的车辆自适应巡航控制系统。MPC通过预测系统未来的行为来优化控制策略,Carsim提供了精确的车辆动力学仿真,而Matlab则提供了强大的数值计算和控制算法设计工具。这三者的结合,使得ACC系统能够在复杂的交通环境中保持安全距离,并提供舒适的驾驶体验。在未来,随着智能驾驶技术的不断发展,MPC和其他先进控制方法将在车辆控制
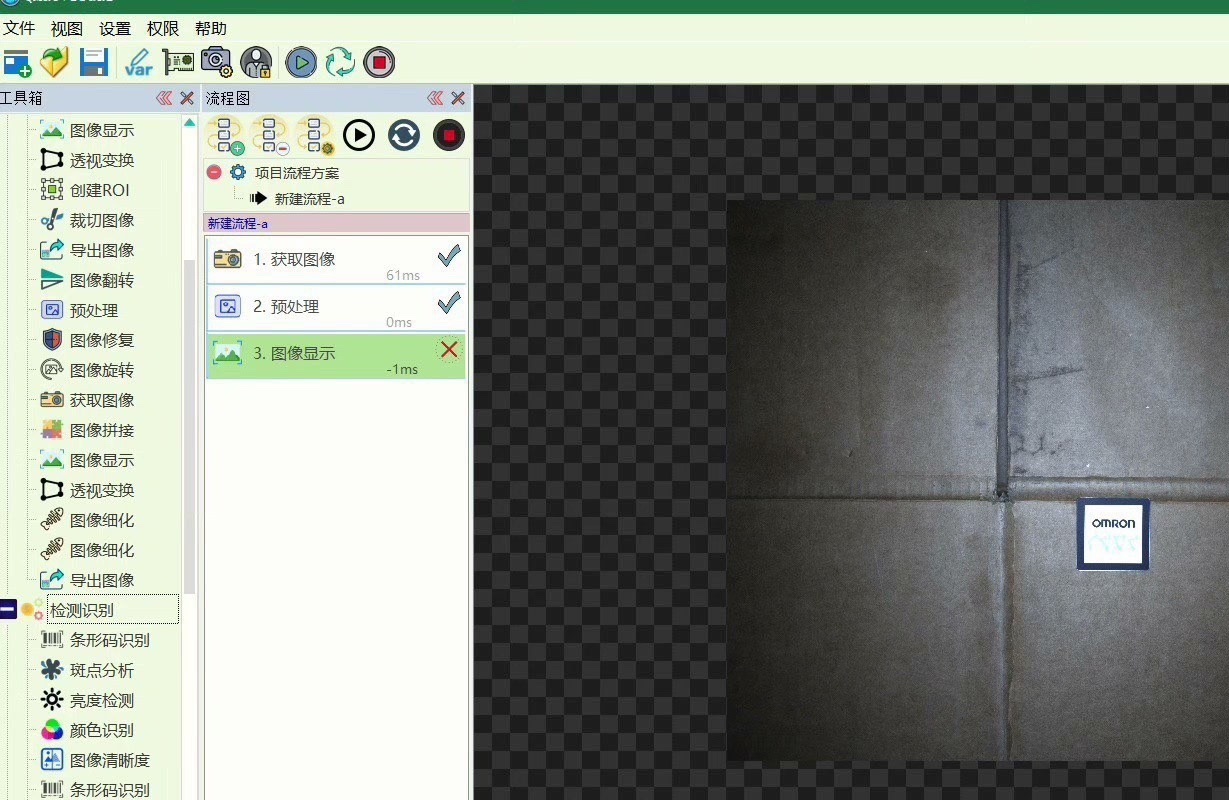
基于 Qt5.12.12 + VS2019 + OpenCV 开发实现,支持多相机多线程,每个工具都是单独的 DLL,主程序通过公用的接口访问以及加载各个工具。基于 Qt5.12.12 + VS2019 + OpenCV 开发实现,支持多相机多线程,每个工具都是单独的 DLL,主程序通过公用的接口访问以及加载各个工具。除了opencv和相机sdk的dll,其它所有算法均无封装,可以根据自己需要补充
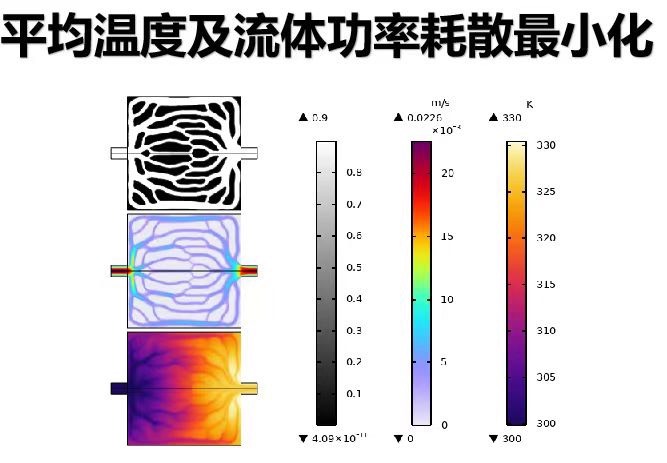
不过要真想落地量产,别忘了把加工约束(最小壁厚/拔模角)提前设进优化条件,否则工厂老师傅会拿着扳手追杀你...(别问我怎么知道的)先看核心思路:既要让芯片表面平均温度最低(防止烧板子),又要让流体流动的功率耗散最小(省电)。基于comsol的双目标函数流热拓扑优化液冷板结构设计,双目标函数为最小化平均温度和最小流体功率耗散最小的无量纲化,欢迎交流。基于comsol的双目标函数流热拓扑优化液冷板结构