




- @AiTEN_Robot
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
支持激光SLAM导航与动态路径规划,适配托盘、料车等多种载具,可全天候运行,特别适用于工业领域制造过程中的物料配送、中转物料仓库等需要频繁运送货物的场所,具有轻小、灵活、通用的特点,极大地改变了传统工业搬运领域的面貌,曾荣获2022德国红点产品设计大奖。,采用SLAM和激光导航技术,结合实时环境扫描,自动规划最优路线,确保在复杂环境中的高效搬运,并配备多种传感器,能够实时监测周围环境,自动避开障碍

某客户有平面库位及立体库位,需要跨楼层搬运,费时费力,且平面库位货物摆放无序,找货困难,高层货物难以存取且易出错。针对客户的诉求,海豚之星AiTEN将智能搬运机器人APe15用于平面库位,搬运货物后放进电梯,立体库位使用码垛机器人AM15从二楼电梯取货放至货架。有效提高了仓库搬运效率,降低了人力成本,确保货物安全存储和准确搬运。尽管二者应用场景不同,但其核心结构与功能高度相似,且通过协同作业可大幅

无人叉车作为智能物流和工业自动化的重要组成部分,正在改变仓库和工厂的物料搬运方式。其优势包括提高效率、增强安全性、节约成本以及良好的可扩展性和灵活性。然而,无人叉车也存在初始投资高、维护复杂、受环境限制和依赖数字基础设施等缺点。尽管存在这些挑战,无人叉车凭借其自动化优势和智能安全功能,仍然是前瞻性仓库运营商的优选。企业需根据自身需求和条件,权衡利弊,决定是否采用这一先进技术。

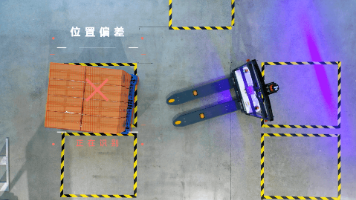
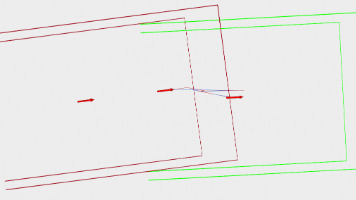
叉车机器人托盘定位技术,指的是机器人在搬运作业中精准识别、对接并叉取托盘的能力。它涉及托盘的空间位置识别、姿态判断、动态调整及路径优化等多个环节,直接影响到搬运效率与作业安全。简而言之,它是叉车机器人利用搭载的先进传感器和智能算法,在复杂动态的仓库环境中,自动识别托盘的位置、姿态(方向、倾斜角度)并进行精准对位的过程。其目标是确保叉齿能安全、稳定、高效地插入托盘插孔。托盘定位技术直接决定着机器人在
内部物流,是指物料在企业内部从收货、存储、生产配送到出库发运的全流程流转。内部物流自动化,则是通过无人叉车、AGV/AMR以及数字化调度系统,对物料搬运、仓储作业和生产供给进行自动执行与统一协同,实现提高效率、准确性和安全性。①减少物料搬运时间。②提高订单管理的准确性。③最大限度地减少浪费和损失。④提高工作场所安全。⑤减少对劳动力的依赖,优化人力资源配置。⑥整合基于人工智能的解决方案以实现持续改进

在全球制造业、物流与电商行业持续承压的背景下,仓库运营成本已成为企业竞争力的关键因素。如何有效降低运营成本同时提升效率,成为企业关注的核心议题。劳动力短缺、用工成本上升以及安全与效率要求不断提高,正在推动企业加速内部物流自动化升级。作为全球领先的与内部物流自动化解决方案提供商,AiTEN通过覆盖全场景的 AGV 产品矩阵,帮助企业系统性降低仓库运营成本,实现长期、可持续的降本增效。

自动托盘搬运车,又称自主托盘搬运车或AGV托盘车,是一种设计用于在仓库或分销中心内运输托盘的无人驾驶物料搬运车辆。这些机器通过先进的传感器、摄像头和导航系统实现无需人工干预的货物运输。什么是自动托盘搬运车?它是如何工作的?与需要人工操作的传统托盘搬运车不同,自动版本可实现:①自主搬运货物,无需人工干涉②自动避障③与仓库管理系统(WMS)通信④24/7执行重复性任务↑APx30自动托盘搬运车图片。

混合A (Hybrid A)**
AGV托盘搬运车正在重新定义企业物流系统的效率边界与扩展方式。AGV无人托盘搬运车是实现可扩展、高效物流的关键。通过自动化仓库和配送中心内托盘的搬运过程,这些机器使企业能够根据需要灵活扩展或缩减规模,提高生产效率并降低成本,同时还能带来诸多其他优势,例如安全性、准确性和灵活性。随着物流行业的不断发展,自动托盘搬运车显然将在塑造未来物流运营中发挥日益重要的作用。

AiTEN海豚之星AMR托盘搬运车是专为托盘化物料搬运而设计的自主移动机器人,广泛应用于仓库、配送中心及制造物流场景。AMR托盘搬运车结合了先进导航技术、传感器系统和人工智能的自动化物料搬运设备。它们能够独立地将货物从一点运送到另一点,并利用传感器和扫描仪感知周围环境。AMR 还能检测并避开障碍物,从而能够与人类和其他机器人安全协同工作。AiTEN AMR托盘搬运车 正在为仓库提供更智能、更柔性、
