- @2508_94216203
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
C#通用框架源码 增加了机器人 流程框架 多任务流程 机器视觉源码框架,算法使用的是halcon,有C#基础和Halcon基础学习这个很好提升快。最近在研究一些超有趣的东西——C#通用框架源码,这里面新增加的内容简直让人眼前一亮!它融合了机器人相关功能、流程框架,还有多任务流程以及基于Halcon的机器视觉源码框架,对有C#基础和Halcon基础的小伙伴来说,绝对是提升技能的宝藏。
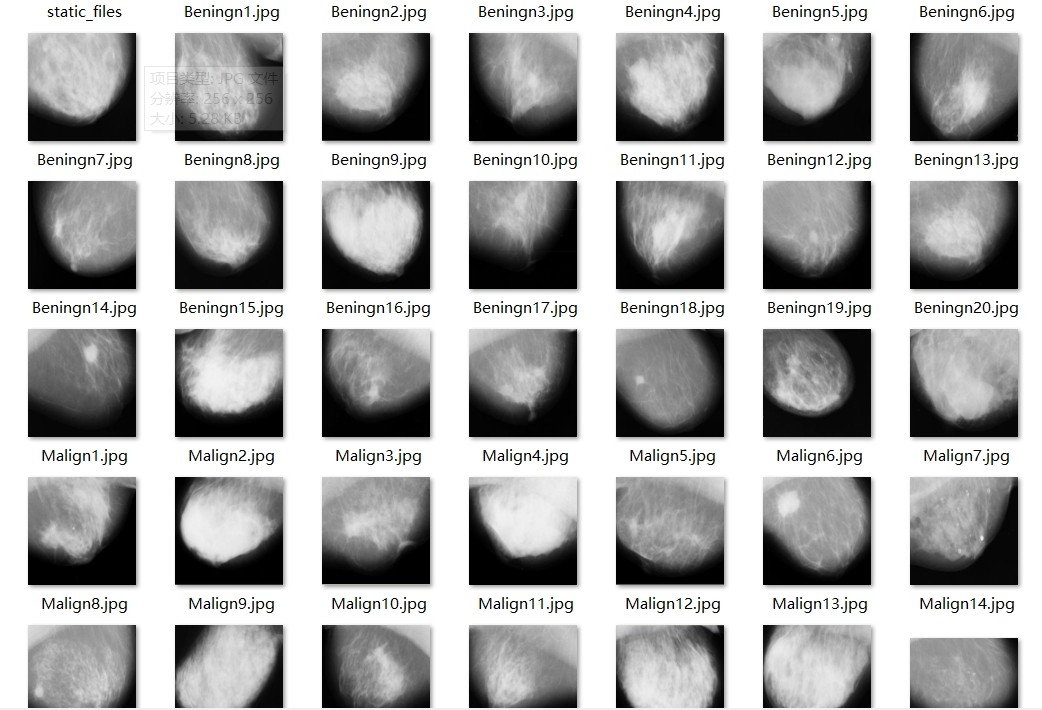
下一步打算用Grad-CAM方法做特征可视化,让医生能直观看到模型关注的区域,这样临床接受度会更高。这个系统可以直接把乳腺影像分成正常、恶性、良性三类,实测效果还不错。跑完一看,恶性病例的召回率达到了89%,正常样本识别准确率92%,良性样本稍低也有85%。特别要留神的是不能把恶性判成良性,这个在损失函数里应该加权重惩罚,不过这次暂时没做这个优化。这段代码直接把嵌套文件夹结构的图像数据打包成了数据
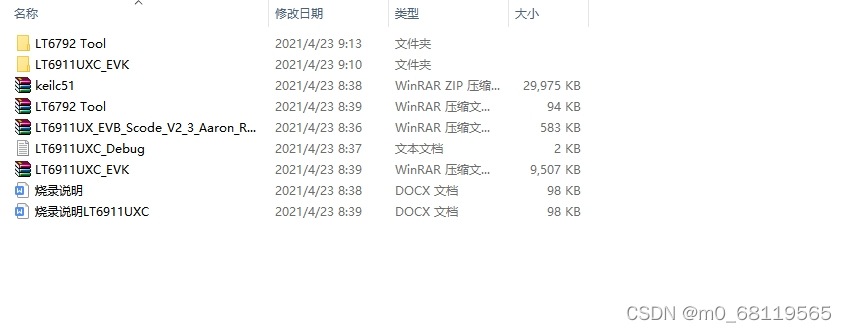
本文深入剖析龙讯半导体(Lontium)两款主流视频桥接芯片LT6911UXC与LT9611UXC的参考固件代码。这两款芯片广泛应用于视频采集、转换和传输领域,尤其在对接海思(HiSilicon)3519A/3559A等SoC平台时扮演关键角色。本文将从整体架构、核心功能模块、初始化流程以及与海思平台的集成方式等多个维度,详细解读其固件实现原理,为开发者提供一份高质量的技术参考。LT6911UXC
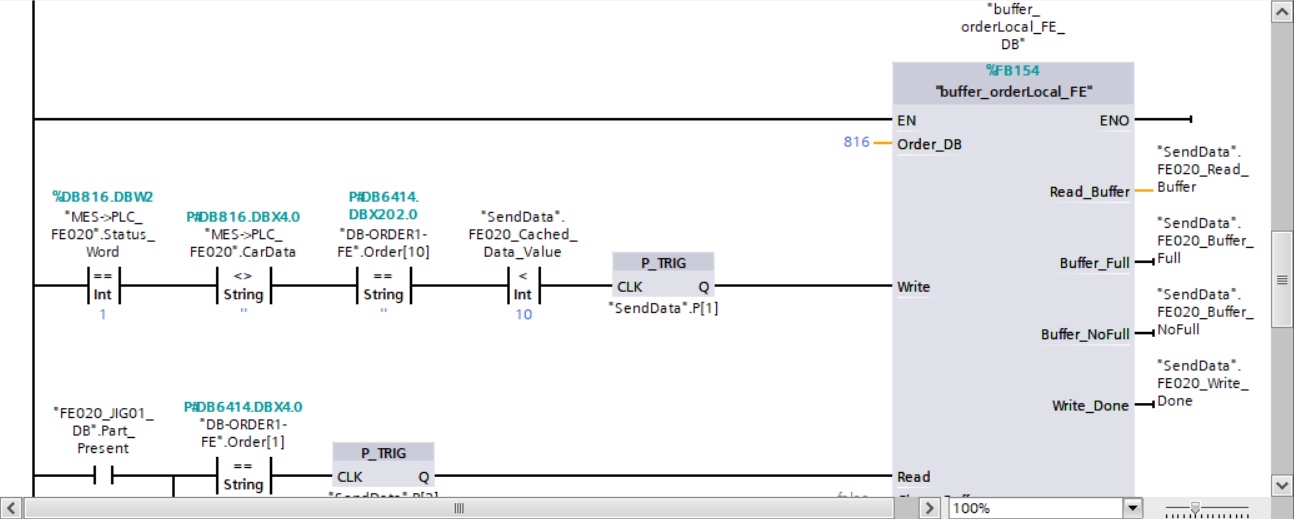
Profinet这玩意儿真是救星,一个网段里塞下机器人、变频器、RFID模块不说,还得跟MES系统眉来眼去。这套系统跑起来后,最爽的是看着机器人阵列跳"机械舞",所有设备数据在WinCC屏上实时刷新的样子。今天咱们就来扒一扒这个焊装系统的技术内幕,玩过PLC的都知道,15个Festo智能模块和10台Fanuc机器人凑一起,那场面绝对够酸爽。这种混合编程才是王道,梯形图负责流程控制,SCL处理复杂运
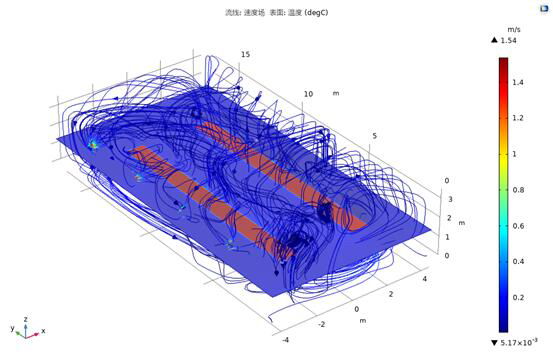
comsol开关柜三维温度场流体场和湿度场数值计算模型,考虑了空气的湿度变化,得到开关柜温度场流体场以及湿度的分布,在电气领域,开关柜的性能关乎电力系统的稳定运行。而温度场、流体场以及湿度场对开关柜的影响至关重要。今天咱们就聊聊利用 Comsol 搭建开关柜三维温度场、流体场和湿度场数值计算模型这事儿,这个模型还特别考虑了空气湿度变化哦。
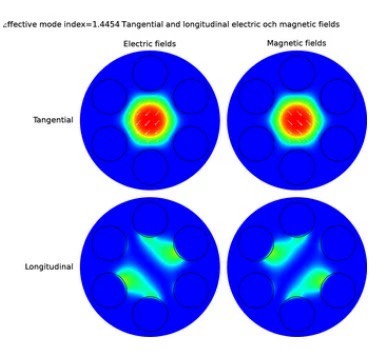
最后提醒,使用参数化扫描研究结构参数(如空气孔直径、晶格常数)时,建议结合批处理功能运行,能节省大量计算时间。在COMSOL中构建这类光纤模型时,网格划分需要特别讲究——纤芯区域采用极细化网格,包层周期性结构使用扫掠网格。comsol光子晶体光纤,反谐振光纤,计算有效折射率及模场,计算多种损耗,限制损耗,散射损耗,弯曲损耗,吸收损耗等。需要注意的是,当孔径与波长接近时,必须启用电磁场频域求解器的二
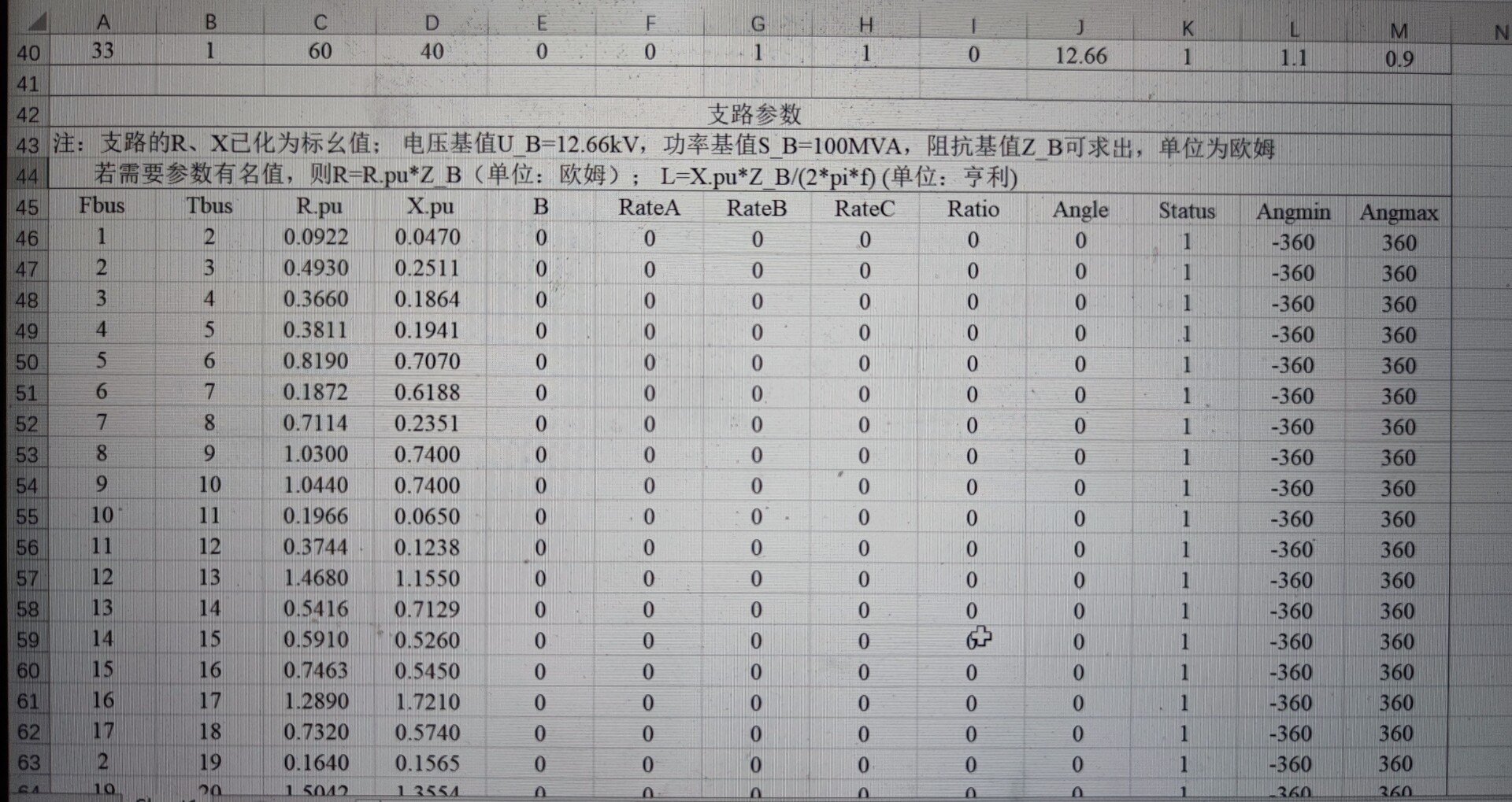
最近在鼓捣配电网仿真的时候发现,搞个能直接上手跑的IEEE33节点模型比找对象还难。翻遍全网终于搞到个靠谱的Simulink模型,节点参数和支路数据都带原始文献参考,关键是不挑MATLAB版本这点太香了——毕竟谁还没被版本兼容问题坑过几次呢?squeeze函数在这里是防维度错乱的保命符,特别是当你要做3D矩阵可视化的时候。下期准备搞个33节点+微电网的混合仿真,感兴趣的记得点个关注防走丢~数据已经
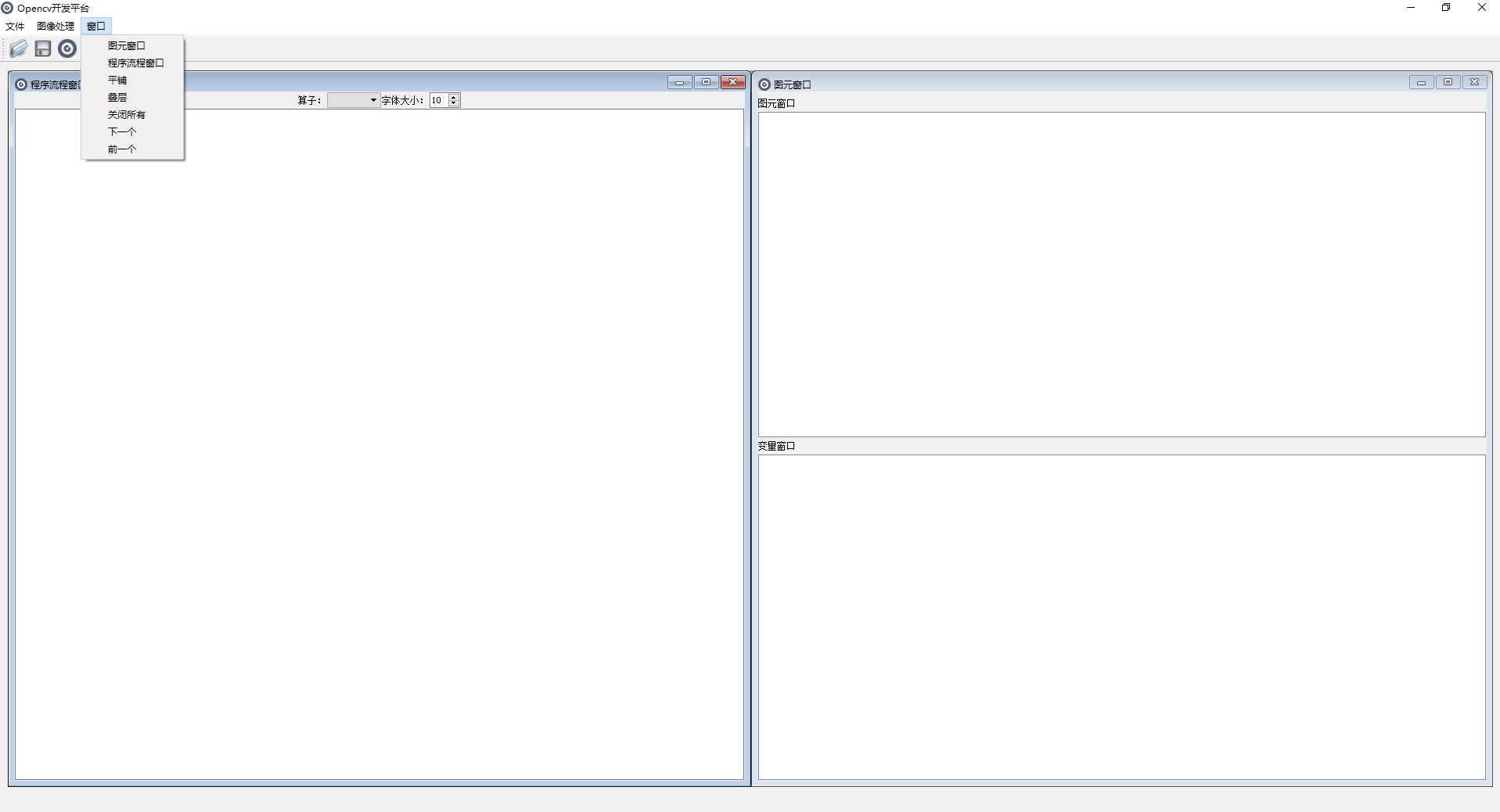
凌晨四点的月光透过窗户,看着自己搭建的框架同时运行着灰度转换、Canny边缘检测和直方图均衡,突然觉得这半个月掉的头发值了——至少下次甲方说要加新算法时,不用从头再撸一遍界面了。看着自己捣鼓了半个月的图形处理框架终于能跑通全流程,摸过手边的冰可乐猛灌一口——这玩意儿可比对象靠谱。QT+opencv开发的图像处理通用开发平台,实现图像常规处理,自定义程序,图元窗口程序流程窗口独立显示,图像显示窗口的
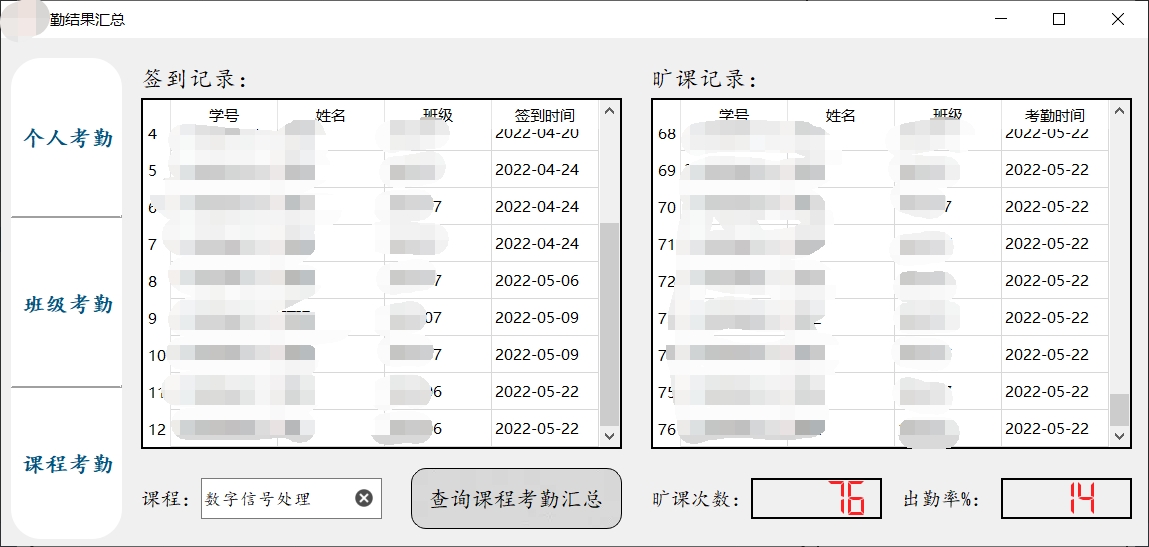
有趣的是当画面里出现多人脸时,程序会疯狂保存所有检测到的人脸——得手动加个防误触机制。现在这系统在实验室跑得挺欢,就是偶尔会把长得像的老师和学生搞混——看来特征提取算法还得优化。"这个画面在计算机实验室里被我们复现了——用Python搞了个能自动识别班级考勤的系统,比传统点名有趣多了。饼图展示考勤状态分布,导出的图片自动插入到PyQt5的报表界面。⑩ 信息添加功能,如: 课表添加,班级信息添加,个
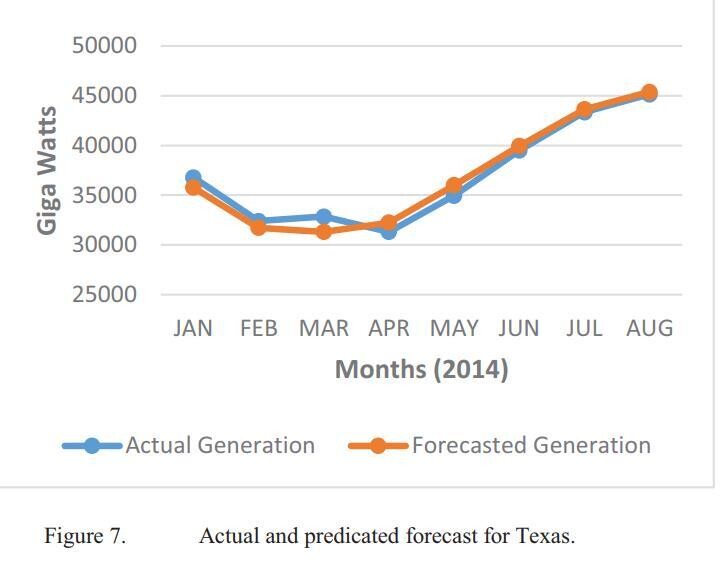
当模型在德州电网的实时数据上跑出99.2%的预测精度时,监控屏幕上的预测曲线几乎与真实负荷重合。"我盯着屏幕上跳动的负荷曲线,想起上个月加州大停电时控制中心的手忙脚乱——是时候让我们的智能预测系统上场了。这个网络藏着三个黑科技:双向LSTM捕捉电力负荷的前后关联,注意力机制自动聚焦关键特征时段(比如早高峰),多步预测头直接输出未来6个时间点的预测量。最后的实时预测模块像给电网装了自动驾驶仪,滑动窗