




- @2508_90533928
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
为什么越来越多机器人企业不再自研导航算法?随着标准化平台的发展,机器人导航正从重复开发的算法模块,演变为机器人系统的底层能力。本文结合导航技术演进、三维激光导航发展趋势,以及松灵一体化底盘和自研导航平台实践,分析模块化平台如何提升开发效率。

本文基于 IsaacLab 平台完成NERO机械臂方块堆叠仿真环境搭建与键盘遥操作数据采集全流程部署,适配标准化仿真开发规范,可快速实现人工遥操作采集、自动化批量采集、数据集回放校验完整闭环。方案兼容 松灵七轴机械臂NERO与松灵六轴PiPER机械臂,支持键盘多自由度精准操控,产出的 HDF5数据集贴合真实人工操作特征,有效解决仿真数据真实性低、泛化性差的问题。整体部署简单、复用性强,可直接用于机
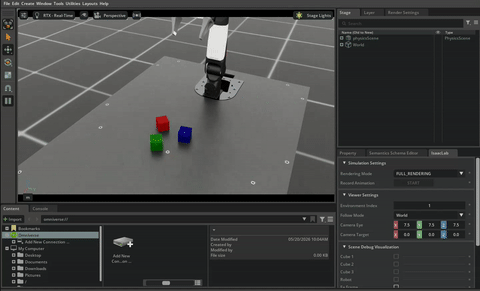
本文完整实现了基于 IsaacLab 的 PiPER 机械臂遥操作与数据采集流程,包括:IsaacLab 外部项目搭建PiPER URDF 转 USD机械臂资产配置Stack Task 环境构建平行夹爪控制适配键盘遥操作人类演示数据采集Robomimic 训练配置相比官方 Franka 示例,本文重点解决了国产机械臂在 IsaacLab 中的兼容问题,尤其是:双夹爪 joint 控制gripper
随着具身智能快速发展,机器人研发的重点正从导航转向操作能力。然而,真正决定开发效率的,不只是大模型,而是机械臂的硬件性能与开发生态。本文基于松灵 NERO 轻量化 7 轴机械臂,从结构设计、运动控制、二次开发、ROS 生态及具身智能应用等方面进行实际测评,为开发者提供参考。

移动机器人覆盖智能制造、仓储物流、工业巡检、农业、科研教育、具身智能场景,四驱四转底盘以其机动性更强、转弯半径更小、复杂地形通行更优的特点,逐步取代传统差速底盘。本文以RANGER MINI 3.0、UMR 两款 ROS2 全向移动底盘为例,解析设备选型标准特点。

SLAM 是移动机器人自主导航核心基础,完整导航能力依托底盘、雷达与导航平台协同实现。底盘输出高精度里程与多源传感数据,支撑 SLAM 精准定位,导航平台完成路径规划、动态避障。松灵 UMR 四驱四转底盘搭配 NAVIS 激光导航平台,打通运动控制、建图定位与自主导航全链路,机动灵活、定位稳定,为仓储物流、工业巡检、农业机器人、具身智能等场景提供高效可靠的一体化开发底座。

行业级移动机器人正越来越依赖一体化底盘与3D导航能力。松灵机器人 UMR 通用一体化底盘结合 NAVIS 3D 导航平台,集成运动控制、环境感知与自主导航能力,帮助开发者快速构建自主移动机器人,降低开发与部署成本。

随着移动机器人应用场景愈发复杂,传统2D导航已无法适配高精度、动态化作业需求。本文对比2D与3D导航差异,阐述3D导航技术优势,介绍多传感器融合、3D SLAM、路径规划等核心技术。以松灵NAVIS 3D导航平台为实例,结合工业巡检场景,解析其一体化导航解决方案与落地价值,为行业选型与开发应用提供参考。

在 VLA 大模型与具身智能实体化研发过程中,科研人员常侧重视觉算法与机械臂开发,容易忽略 ROS2 智能移动底盘对 SLAM 建图、移动抓取的底层支撑作用。不合理的底盘选型易引发地图精度变差、数据集污染、机械臂抖动、ROS2 兼容故障等问题。本文围绕松灵四轮差速、阿克曼、履带、四轮四转四类底盘开展架构剖析,对比各项性能与落地场景,为具身智能项目硬件选型提供工程参考。关键词:具身智能,移动底盘,S

本文以松灵机器人(AgileX Robotics) UMR(Universal Mobile Robot) 四轮四转全向底盘为参照,拆解复杂环境机器人必备硬件能力、行业规模化落地底盘五大标准,梳理企业部署机器人四大核心痛点,给出 6 大底盘选型评估维度,同时配套标准化开发、运维解决方案,为研发、采购、集成商提供客观选型参考。
