- @2504_94308238
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
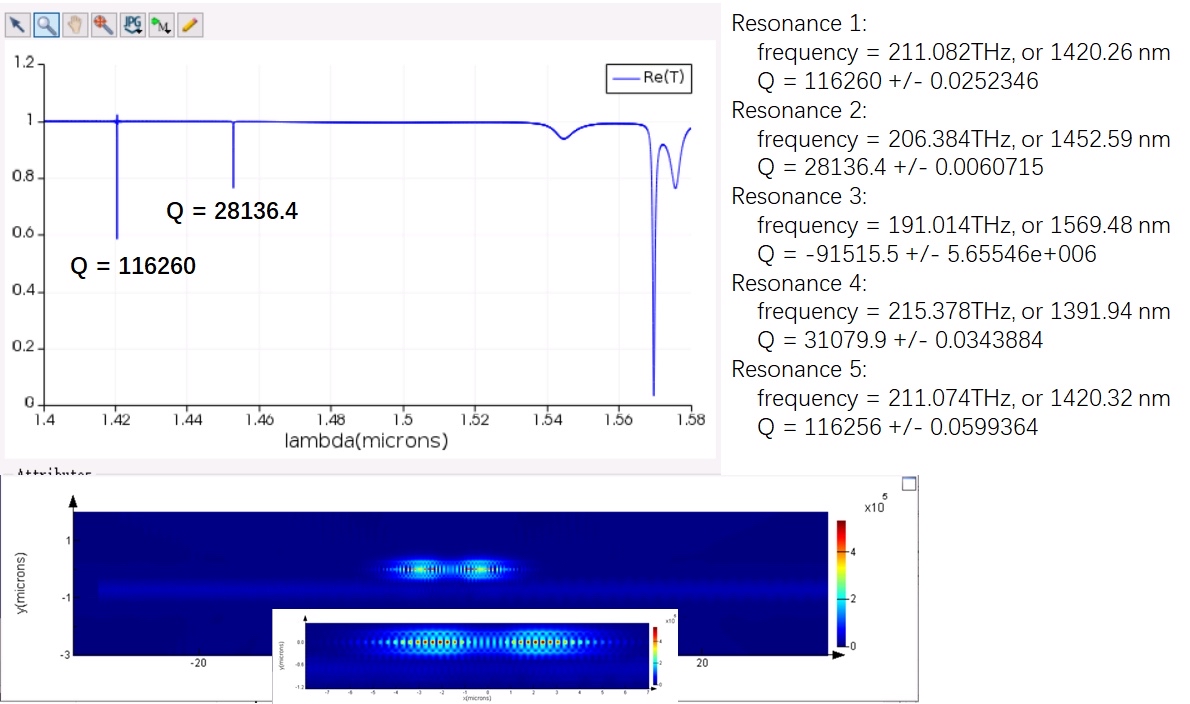
光子晶体这玩意儿玩的就是周期性结构对光的操控能力,特别是缺陷模产生的局域光场。今天咱们就拿一维光子晶体开刀,看看怎么用脚本实现从建模到Q值优化的完整流程。不过要注意材料吸收——当结构层数超过30层后,Si3N4的本征吸收会开始压制Q值上限。实测发现直接使用Palik数据库的SiO2和Luke的Si3N4参数,在近红外波段吻合度最好。先搞个基础结构练手:假设我们堆叠20层交替的SiO2和Si3N4材
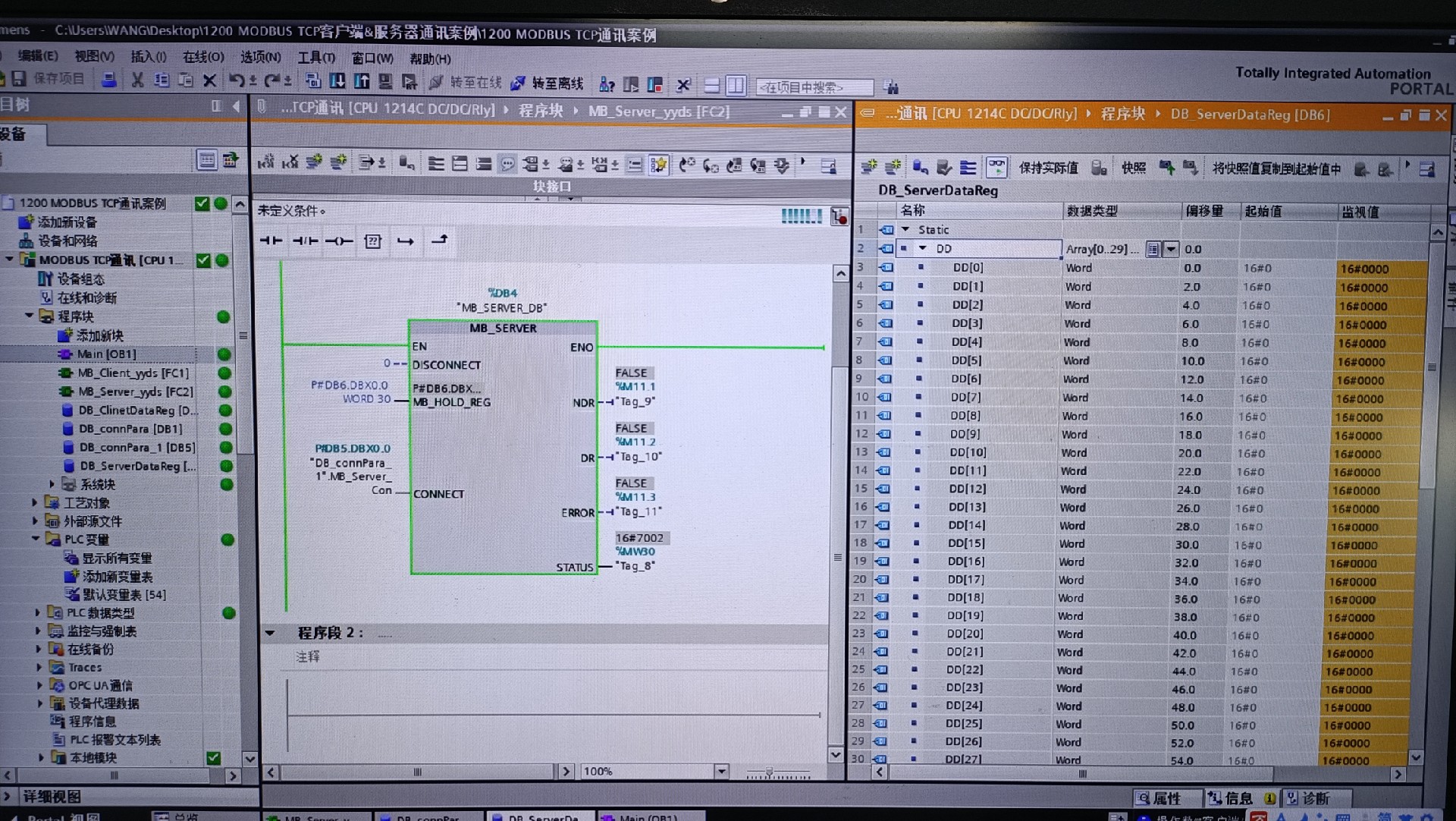
重点来了,记得在设备视图里给PLC的以太网口勾选"允许来自远程伙伴的PUT/GET访问",这个不打开的话后面通讯绝对扑街。之前有次在现场死活连不上,最后发现是甲方IT把端口封了,简直吐血。搞工控的兄弟应该都绕不开Modbus协议,今天咱们来唠唠西门子S7-1200玩转Modbus TCP主从通讯的实战姿势。遇到过最离谱的翻车现场是DB块没设置成非优化访问,导致地址对不上,设备读出来的都是乱码。从站
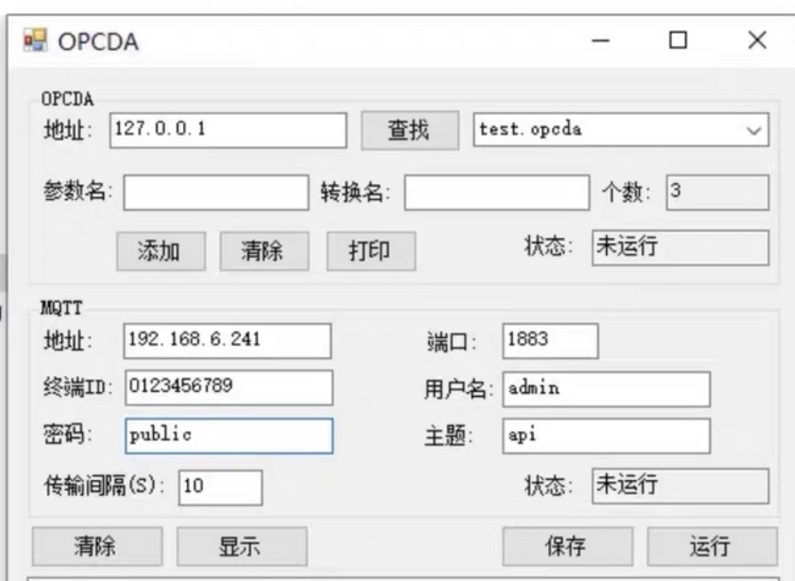
本程序是一款基于C# Windows Forms开发的OPCDA客户端工具,核心功能是实现从OPCDA服务器采集数据,并通过MQTT协议将数据上传至指定服务器。程序依赖OPCDAAuto.dll组件实现OPC通信,通过MQTTnet库处理MQTT协议交互,支持配置参数持久化存储和运行日志记录,整体设计围绕工业数据采集与转发的核心需求展开。
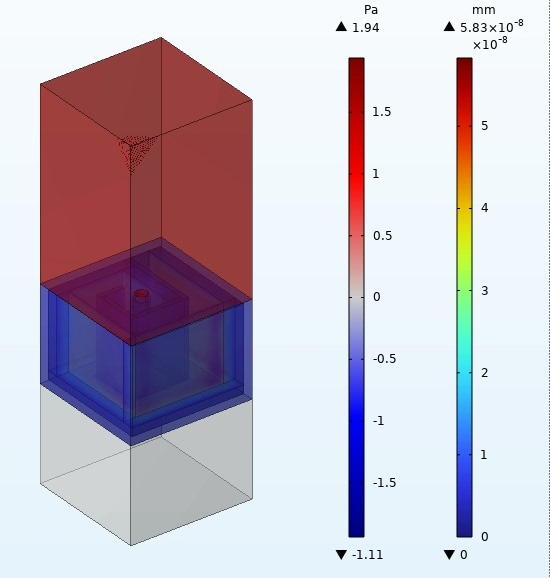
通过上述步骤,我们成功地在COMSOL中建立了一个声学超材料的吸隔声仿真模型,并展示了如何根据实际需求对模型进行个性化定制。COMSOL的强大功能和灵活性使其成为研究声学超材料的理想工具。无论是初学者还是经验丰富的研究人员,都可以通过COMSOL快速构建和优化自己的声学模型。如果你对这个模型感兴趣,或者有其他声学仿真需求,欢迎随时交流!
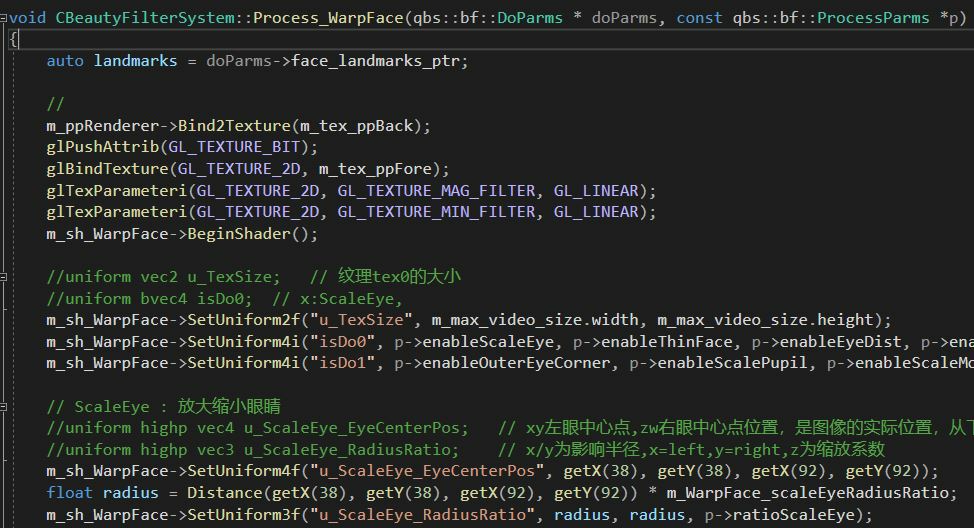
C++ 源代码 : 基于OpenGL和TensorRT实现的PC端实时人脸美颜系统运行于Win10 64位系统,用CUDA和TensorRT实现人脸位置检测和106关键点检测,用OpenGL和GLSL实现人脸美颜,美颜功能有瘦脸/眼睛大小/眼距调整/瞳孔大小调整/移动内眼角/移动外眼角/嘴巴大小调整/皮肤美白, 可在GTX 1060Ti及以上显卡实时计算;在计算机视觉领域,实时人脸美颜是一个十分有
针对该智能楼宇群系统中运营商与用户之间的交易关系,本文基于非合作博弈的“一主多从”Stackelberg模型提出了智能楼宇群日前能量管理优化模型,并证明了该博弈均衡解的存在性和唯一性,并针对其求解提出了相应的算法并证明了其收敛性。针对该智能楼宇群系统中运营商与用户之间的交易关系,本文基于非合作博弈的“一主多从”Stackelberg模型提出了智能楼宇群日前能量管理优化模型,并证明了该博弈均衡解的存
OpenScenario场景仿真搭建 , OpenScenario是 自动驾驶仿真软件carla推出来的场景仿真标准,可配合carla一起完成整套自动驾驶的闭环仿真过程,将场景搭建变成可编程化的方式。可以模拟出自动驾驶真实环境中出现的各种各样的路况环境,例如:被动超车场景、跟车变道场景、换道场景等等。本教程有完善的非常简单环境搭建说明文档,不依赖gpu、opengl等熏染工具,并配有简单清晰易懂的
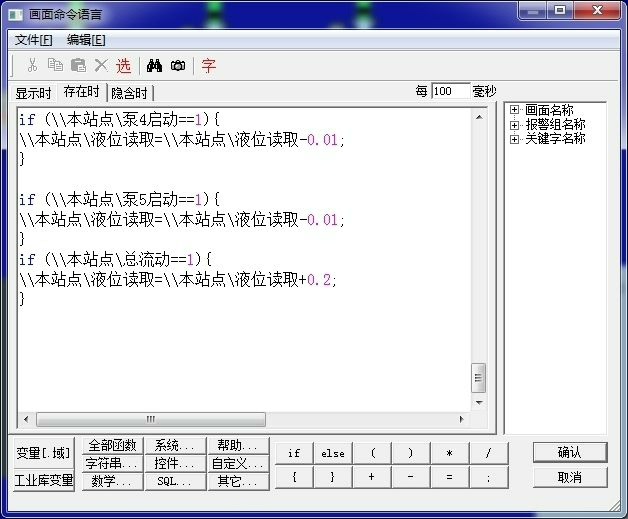
No.914 三菱PLC和组态王组态5泵排水五泵矿井综合排水电气自动控在矿井作业中,排水系统的稳定性与自动化程度至关重要。今天来聊聊利用三菱PLC和组态王实现五泵矿井综合排水电气自动控制的有趣实践。
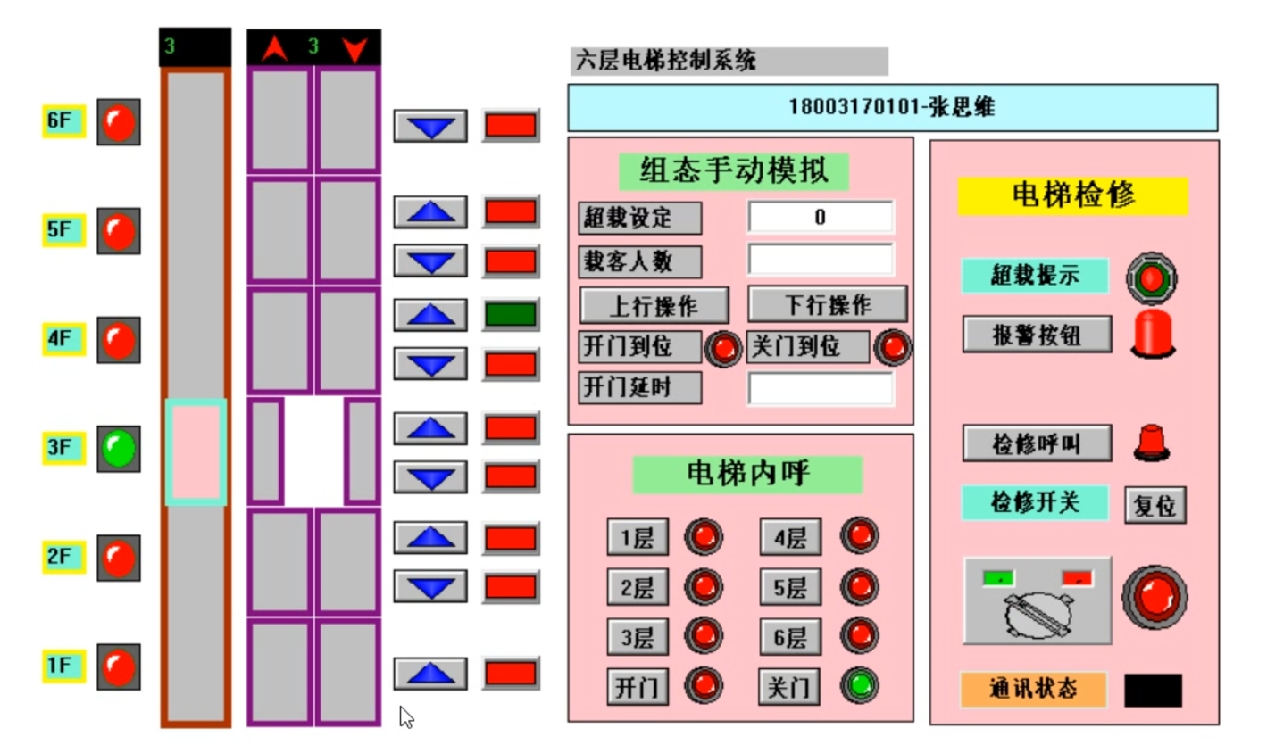
最后在触摸屏上看到电梯按着预定逻辑跑起来时,突然觉得这些古老的PLC就像电梯里的老司机——虽然动作慢了点,但绝对稳如老狗。并用MCGS组态软件进行六层电梯的仿真模拟监控界面设计,实现电梯轿厢的上下运行显示,内呼选层控制和外呼按钮控制,电梯轿厢开关门显示等,使仿真程序和实体PLC控制柜建立连接。基于西门子的S7-200电梯控制程序(主要包括电梯定位程序,外呼内选信号的记忆、显示、响应和消除程序,优先
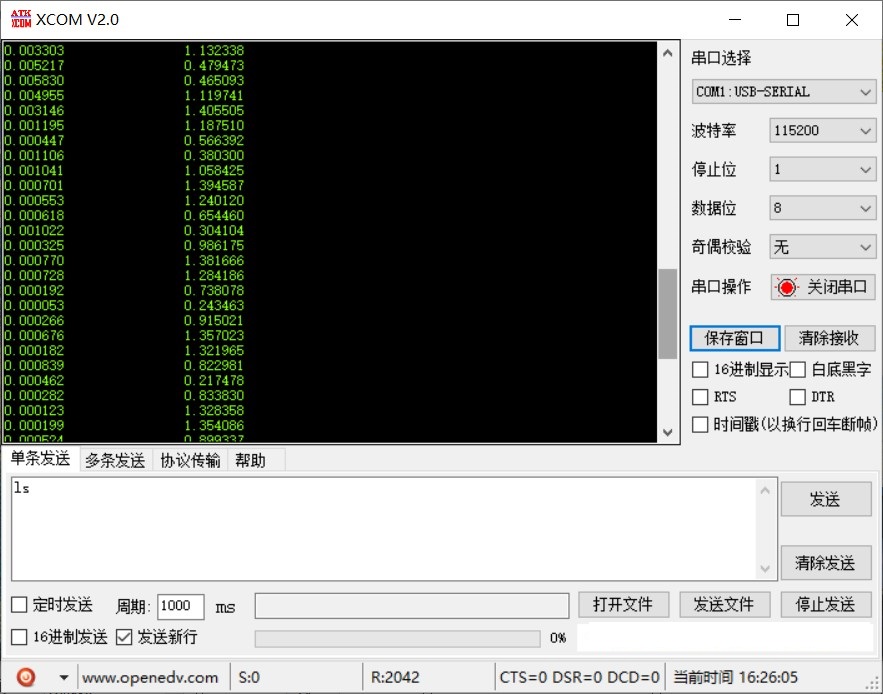
使用STM32DSP库制作的数字滤波器,滤波器系数通过MATLAB生成。配合STM32串口输出,在Excel中绘图,上面只是演示了低通滤波器。源码,包括滤波器系数生成教程。在嵌入式系统开发中,数字滤波器是一项极为实用的技术,它能对信号进行各种处理,比如去除噪声、分离不同频率成分等。今天咱们就来聊聊如何使用STM32DSP库制作数字滤波器,并且借助MATLAB生成滤波器系数,再配合STM32串口输出