- @2504_94301232
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
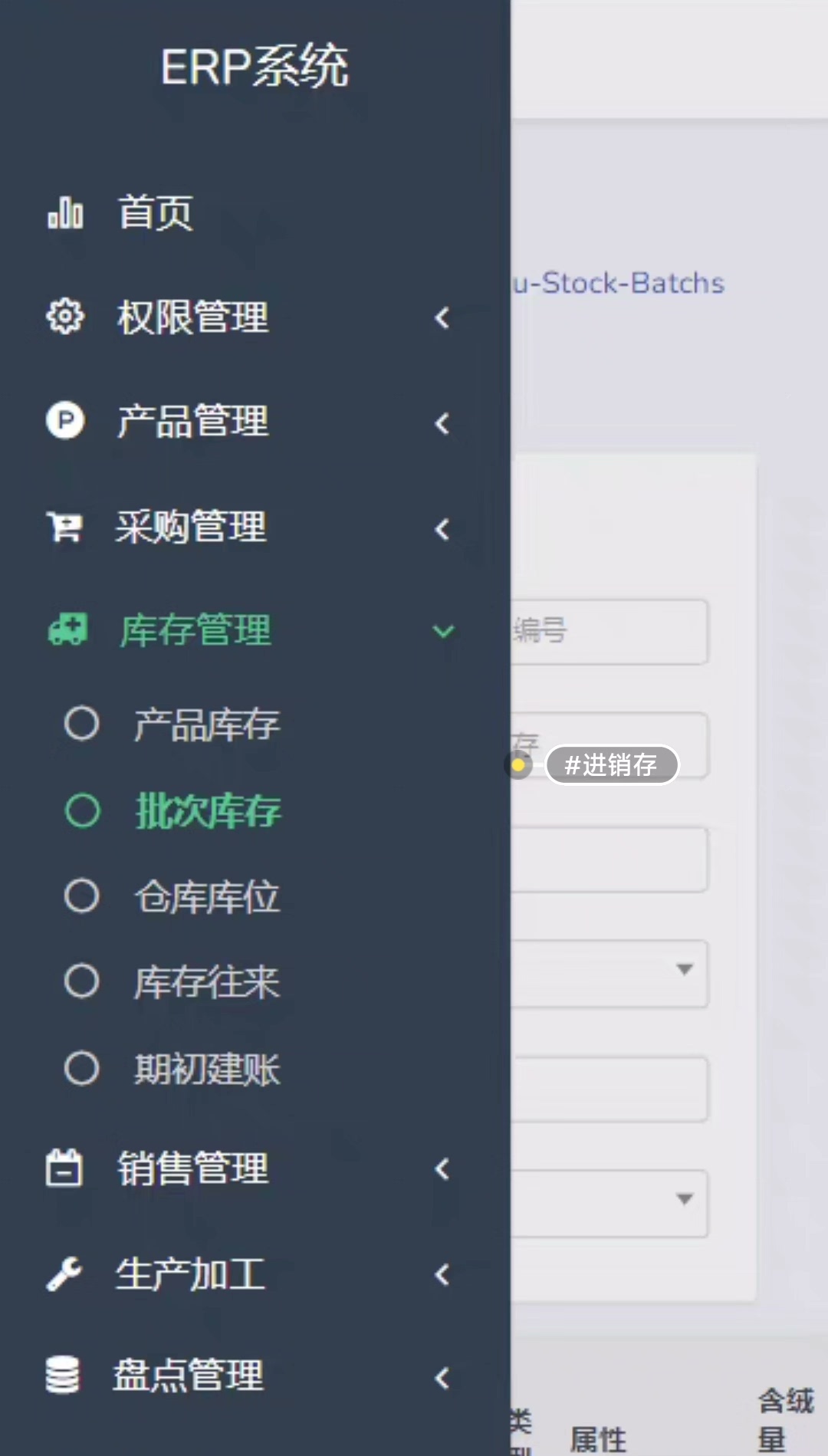
这个进销存管理系统主要用于企业管理和库存控制,支持商品的进、销、存以及生产加工功能。系统基于 PHP 语言开发,采用网络架构,支持多用户同时访问。商品库存管理商品销售记录生产订单管理库存查询与分析报告生成通过以上修复和优化,我们的进销存管理系统在性能和稳定性方面得到了显著提升。系统不仅功能更加完善,而且在面对大量数据时也能保持良好的响应速度。未来,我们还计划继续优化系统功能,并探索更多技术手段来提
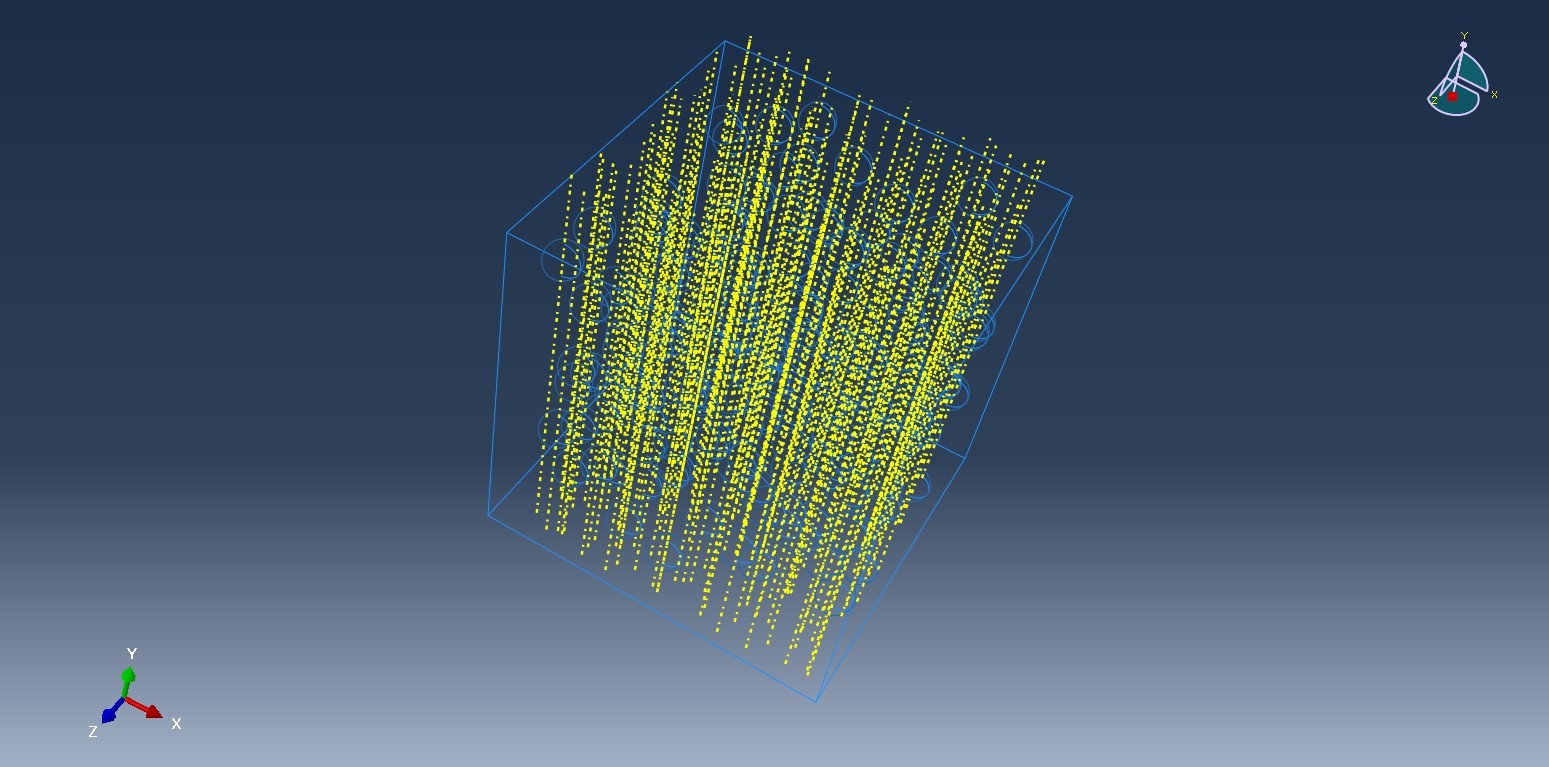
函数接受混凝土边界的长、宽、高,圆形骨料的最小半径、最大半径以及骨料数量作为参数。首先在模型中创建一个草图,并定义一个三维可变形体的部件,后续我们将在这个部件上生成圆形骨料。
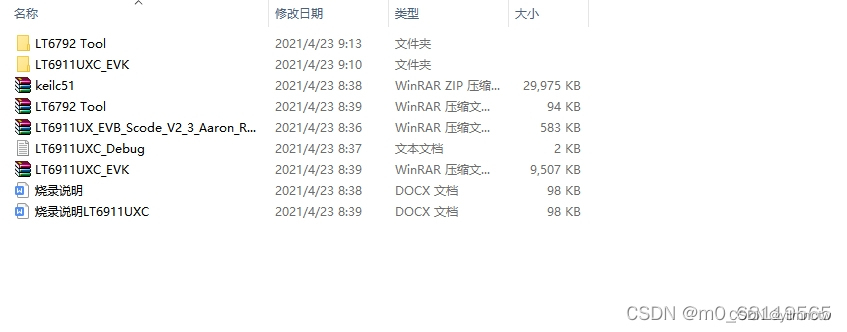
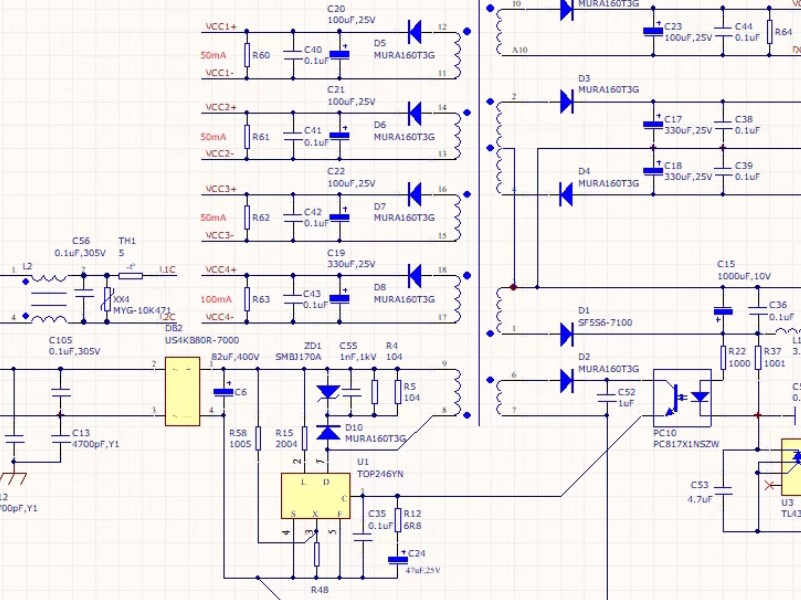
LT6911UXC和LT9611UXC芯片凭借其强大的功能和灵活的配置,成为HDMI转MIPI应用中的佼佼者。无论是智能电视、车载显示系统还是工业显示设备,这两款芯片都能提供出色的性能和可靠性。对于开发者来说,龙讯半导体提供的丰富开发资源也大大降低了开发难度,缩短了开发周期。未来,随着显示技术的不断发展,LT6911UXC和LT9611UXC芯片有望在更多领域中得到应用,为用户提供更高质量的显示体
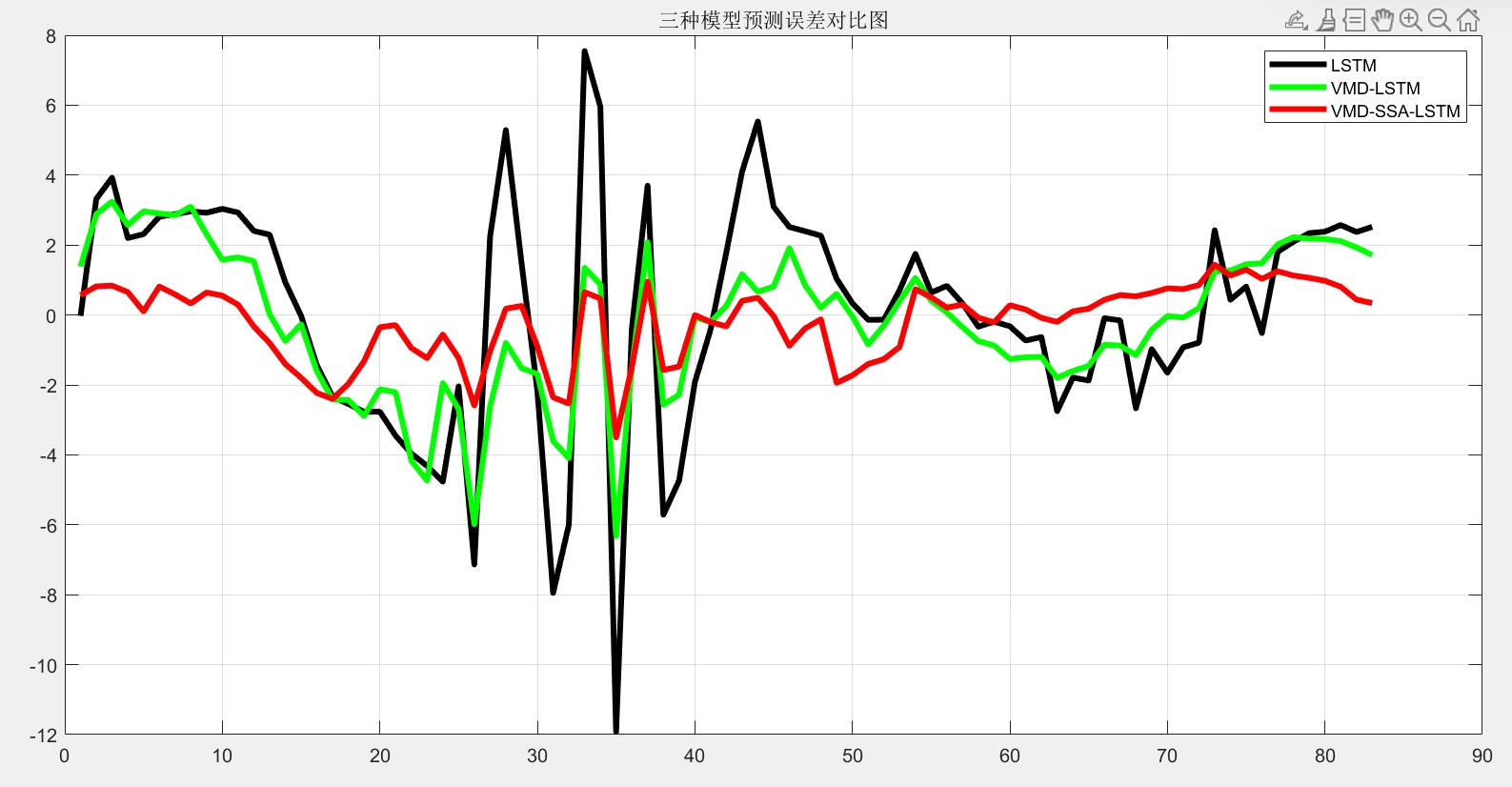
麻雀们飞着飞着可能会掉进局部最优的坑,这时候得在适应度函数里加点正则化项,相当于给它们装个GPS。见过最骚的操作是把验证损失和参数规模的平方根加权求和,防止模型过拟合。有甲方爸爸非要加卡尔曼滤波,结果预测曲线平滑得像是美颜拉满——所以说算法工程师的宿命就是陪着需求在跑道上不断折返跑啊。不过别高兴太早,遇到沙尘暴天气还是会翻车——这时候得祭出迁移学习大法,用其他电站的历史灾难数据做预训练。这玩意儿能
SIEMENS/西门子TMS320F28335运动控制器DSP28335驱动器DSP28335运动控制卡采用DSP28335作为主控支持有刷电机,无刷电机,伺服电机电机电机参数识别,运动控制支持速度环,位置环,编码器,模拟量接口支持CANOPEN,modbus总线包括原理图,源代码已移植量产使用,具有极高的参考价值最近在研究运动控制相关项目,发现SIEMENS的TMS320F28335运动控制器真
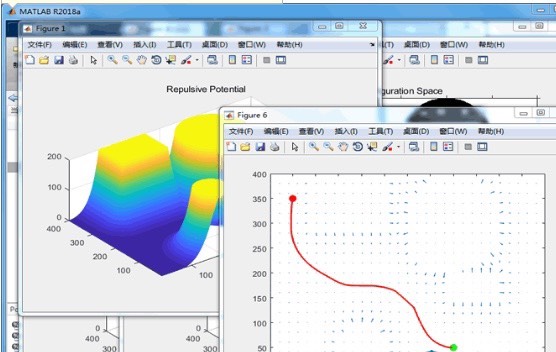
别信论文里的推荐值,自己拿着PotentialFieldScript.m里的滑块多调几次:alpha从0.5开始慢慢加,gamma先设个10试试,beta根据障碍物密度来。今天咱们直接扒开代码看看怎么用MATLAB实现机器人绕障,重点说说那些让小白头秃的实现细节。先甩个场景:红色是障碍物,绿色是目标点,机器人得从蓝色三角位置麻溜儿地绕过去。这里有个隐藏bug:当机器人离障碍物太近时,dist趋近于
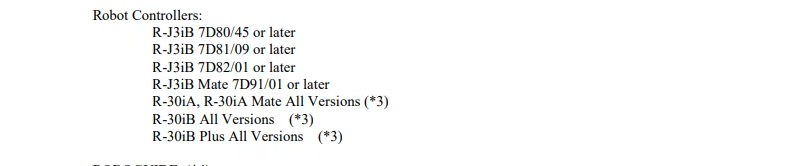
这次利用 Visual Studio 2019 对 Fanuc 工业机器人 SDK 二次开发实现的 C# 上位机集成了众多实用功能。虽然代码已加密,不过分享了各个功能实现的大致思路和关键代码片段。希望能给同样在工业自动化开发领域探索的朋友们一些启发,一起推动工业自动化的发展。
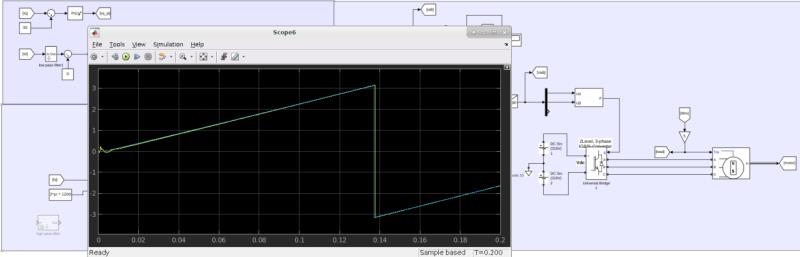
本高压直流输电系统在线监测控制系统基于MATLAB/GUI开发,以CIGRE HVDC标准测试系统为仿真载体,旨在实现高压直流输电系统的实时监测、仿真控制及数据可视化分析。系统依托Simulink/SimPowerSystem工具搭建电磁暂态仿真模型,通过自定义编写的“.m”程序实现仿真模型调用、运行数据采集、图形化展示及控制参数配置等核心功能,为高压直流输电系统的稳态与暂态特性分析提供一体化解决

高频注入法的核心思想是向电机绕组注入高频信号,通过检测电机对高频信号的响应来获取转子位置信息。由于永磁同步电机的凸极效应,高频信号在不同的转子位置会产生不同的响应,从而可以通过对这些响应信号的处理来估算转子位置和速度。
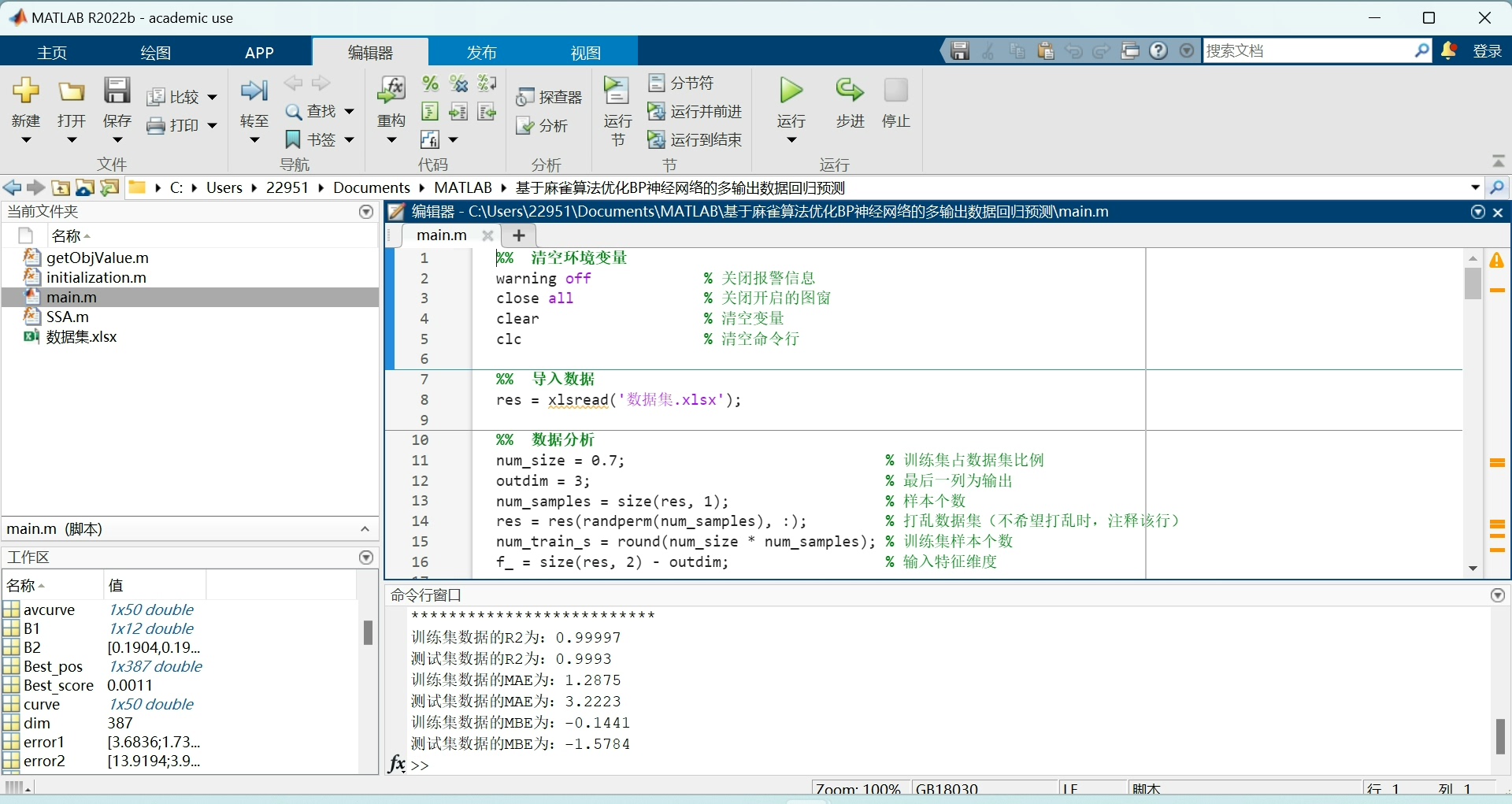
麻雀搜索算法是一种受麻雀觅食和反捕食行为启发的新型群智能优化算法。在算法中,麻雀分为发现者(探索者)和加入者(追随者),发现者负责寻找食物源并为整个种群提供觅食方向,加入者跟随发现者获取食物。同时,算法还考虑了麻雀的反捕食行为,当麻雀察觉到危险时会迅速做出反应。适应度函数用于评估每个麻雀个体的优劣,这里我们以BP神经网络的预测误差作为适应度。% 解码个体% 训练BP神经网络% 预测% 计算误差%