- @2503_93975890
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在工业自动化现场,PLC 与上位机之间的“实时、双向、可视化”数据交互是数字化改造的第一步。本文以“台达 PLC 串口通信”项目为蓝本,深度剖析一套通用型 Modbus-RTU 上位机框架的设计思想、功能切面与工程落地要点。该框架把“通信、解析、展示、配置”四层彻底解耦,现场工程师只需维护一份映射表,就能在 30 min 内完成新台型导入。代码级细节已做脱敏处理,若需深入定制,可依据“功能切面”小

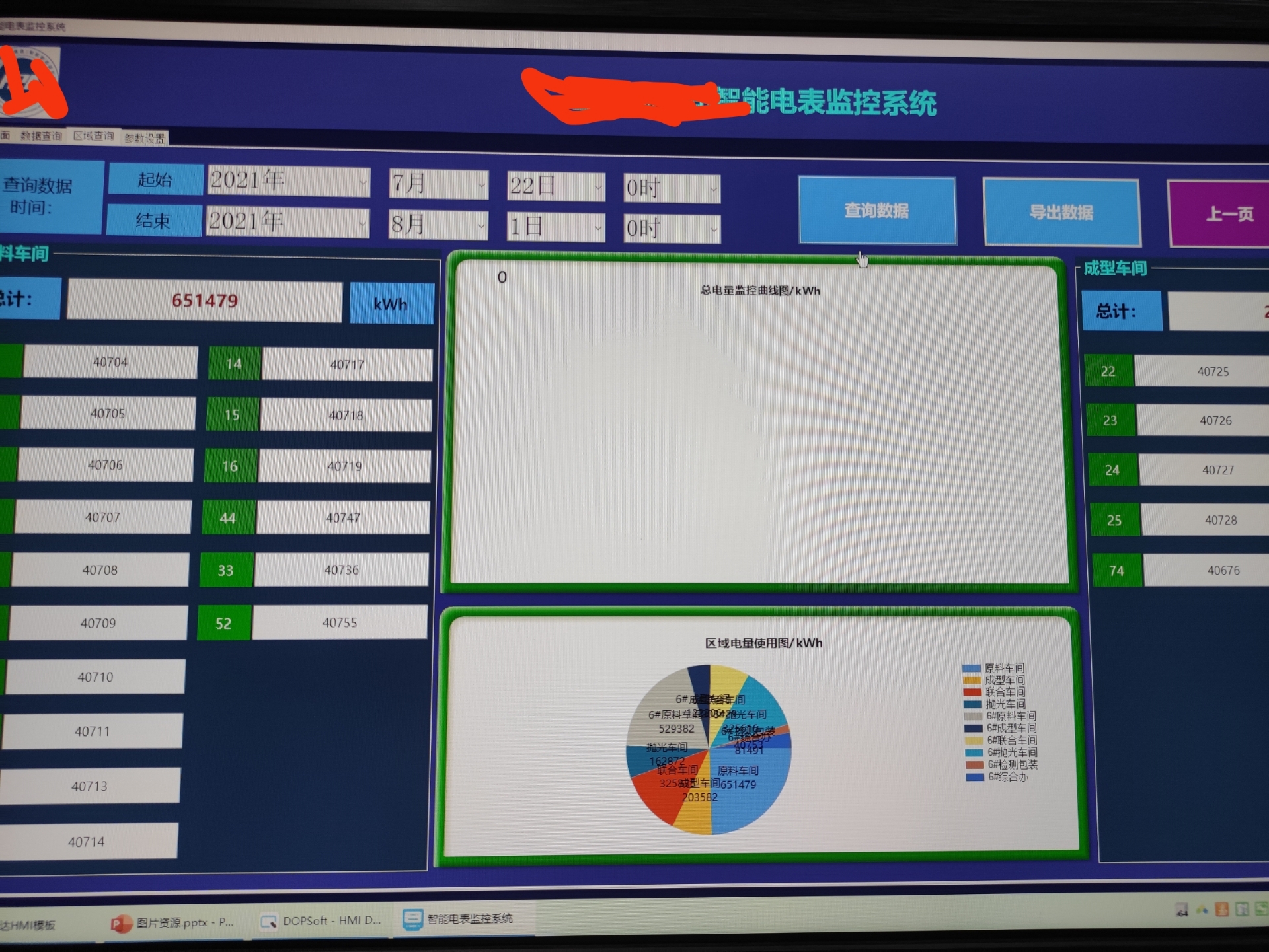
智能电表远程抄表系统是一个基于.NET Framework 4.8开发的Windows桌面应用程序,专为工业企业电表监控和管理设计。该系统通过现代化的用户界面提供了电表数据采集、实时监控、历史查询和参数配置等核心功能,帮助企业实现电能的智能化管理和分析。
这是一个专为欧姆龙PLC设计的C#通信库,实现了基于FINS协议的以太网TCP通信功能。该库提供了完整的通信框架,支持多种内存区域的读写操作,能够方便地与欧姆龙PLC进行数据交换。

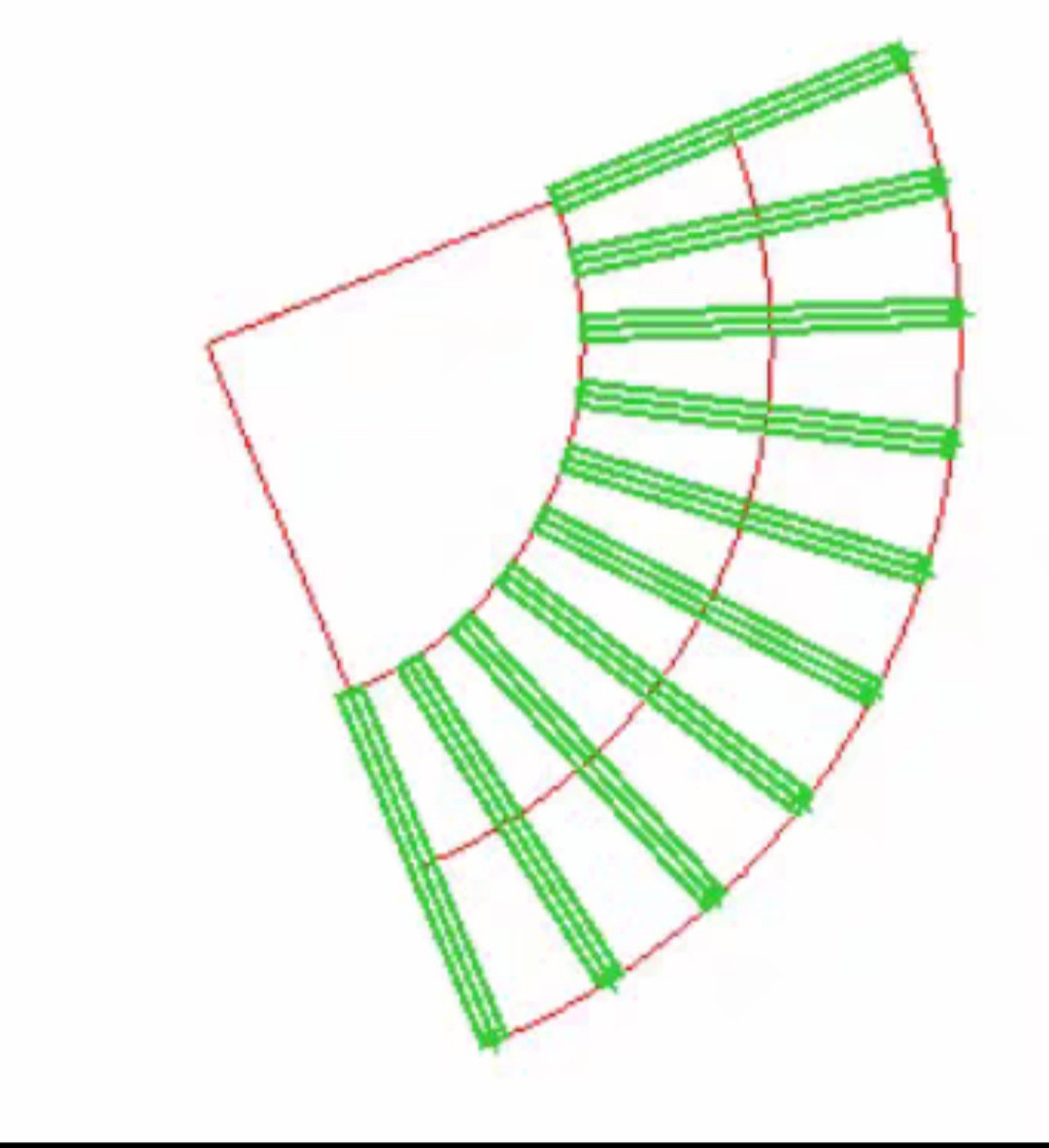
c#联合opencvsharp开发的视觉源码程序包含模板匹配,找线找圆,预处理等功能全部源码,包含图像显示控件,绘制roi本文深入剖析一套基于 C# 与 OpenCvSharp 构建的工业级机器视觉系统。该系统面向高精度定位、缺陷检测与模板匹配等典型工业应用场景,采用模块化、可配置化的设计理念,支持 Basler 等主流工业相机接入,并具备完整的配方管理、参数序列化、图像处理工具链及结果可视化能力
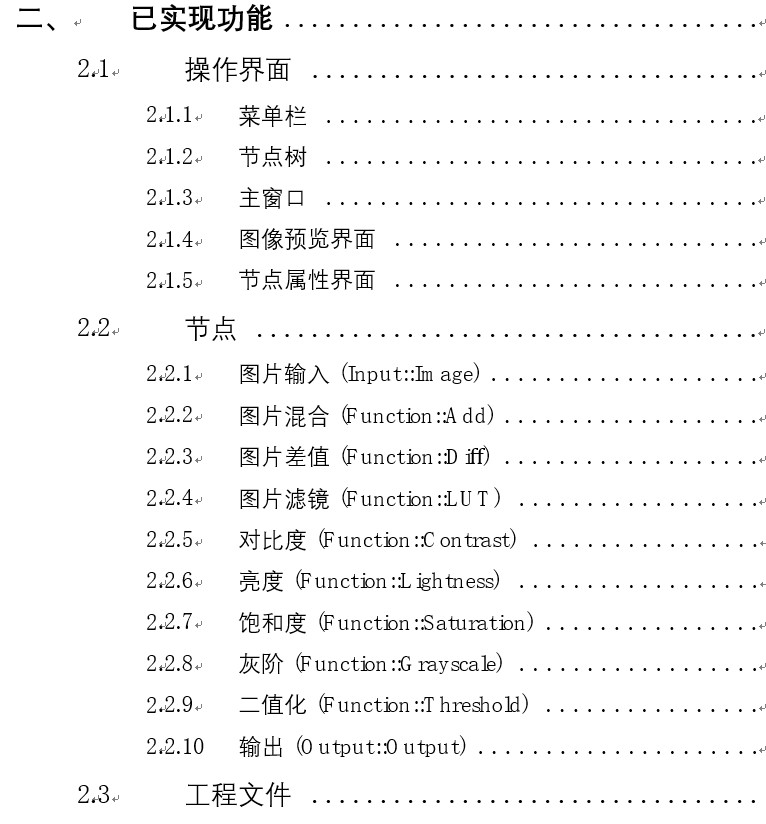
接口位置计算用简单算术搞定,输入口固定在左侧边缘,输出口在右侧,后续连线时用scene坐标转换就能获取准确位置。Qt/C++实现的节点式图形编辑器,可以添加左侧树上的节点,面板可以放大缩小,节点之间有输入输出接口,使用线进行连接,通过鼠标选中节点或线按住delete键可以进行删除,可以生成节点的图片进行导出的功能。控制点的水平偏移量固定为50像素,这样无论节点间距多大,连线都能呈现平滑的S形。核心
thinger.VisionDemo 通过“高度封装 + 可视化标定”将原本需数周的视觉运动一体化项目压缩至数天;开发者只需聚焦工艺逻辑,无需深陷算法与协议细节,真正做到“开箱即用、稳定可复制”。
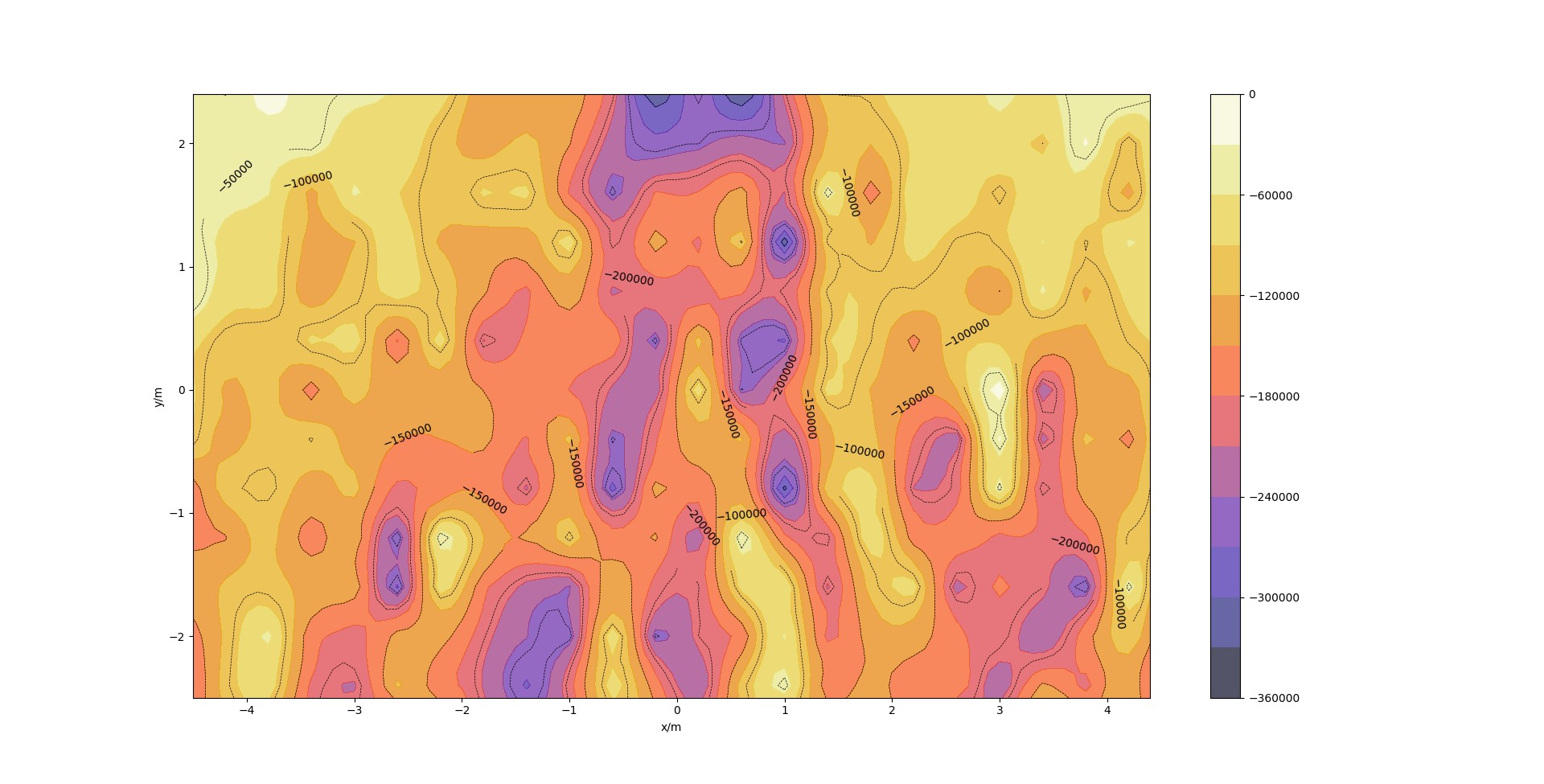
PFC2D利用python生成应力云图,代码简单易懂在岩土工程数值模拟领域,PFC2D(Particle Flow Code in 2D)是一款强大的工具,它能够模拟颗粒介质的力学行为。而借助 Python 的数据处理与可视化能力,我们可以轻松生成应力云图,更直观地展现模拟结果。今天就来跟大家分享一下如何用简单易懂的代码实现这一过程。
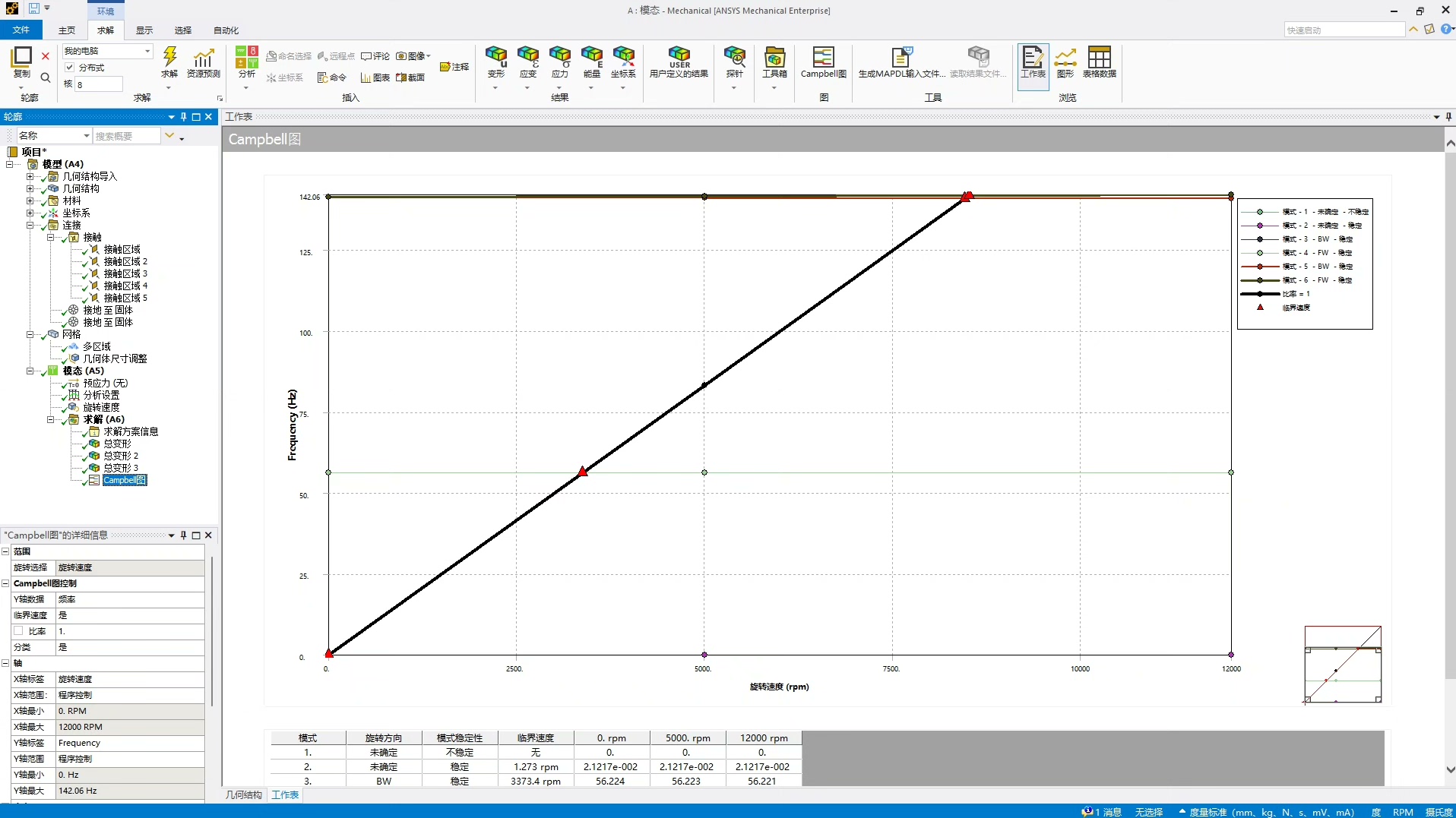
在Workbench后处理里点几下生成这个神器,你会看到三条妖娆的曲线:蓝色的是固有频率随转速变化,红色的是1倍频线,绿色的是2倍频线。在工厂里那台嗡嗡作响的鼓风机又双叒叕出问题了,轴承温度异常升高时老师傅叼着烟说了句:"这转子怕是遇上临界转速了"。就像相亲照和真人差距太大,模型和实物之间,永远隔着一条叫"简化假设"的鸿沟啊。这时候要特别注意第三阶模态,它的频率线刚好在3000转时和1倍频线亲密接
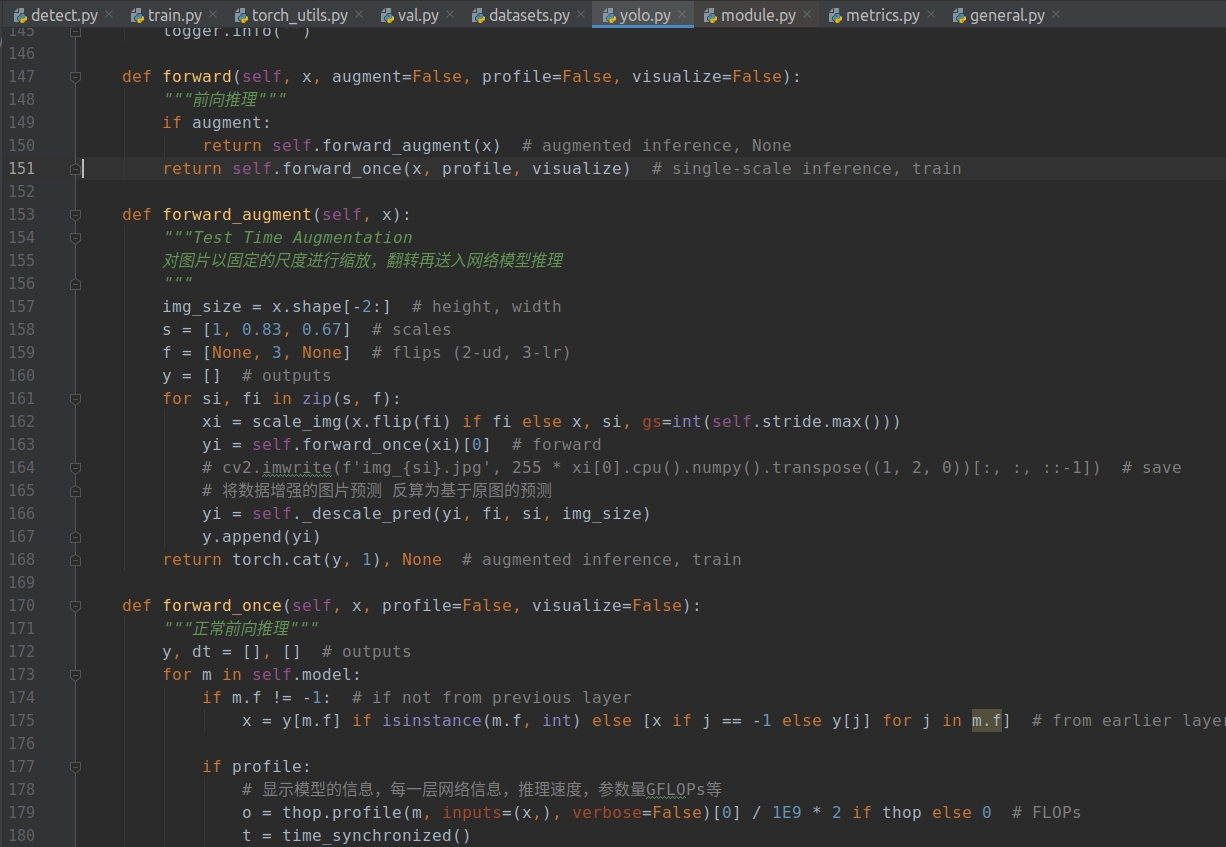
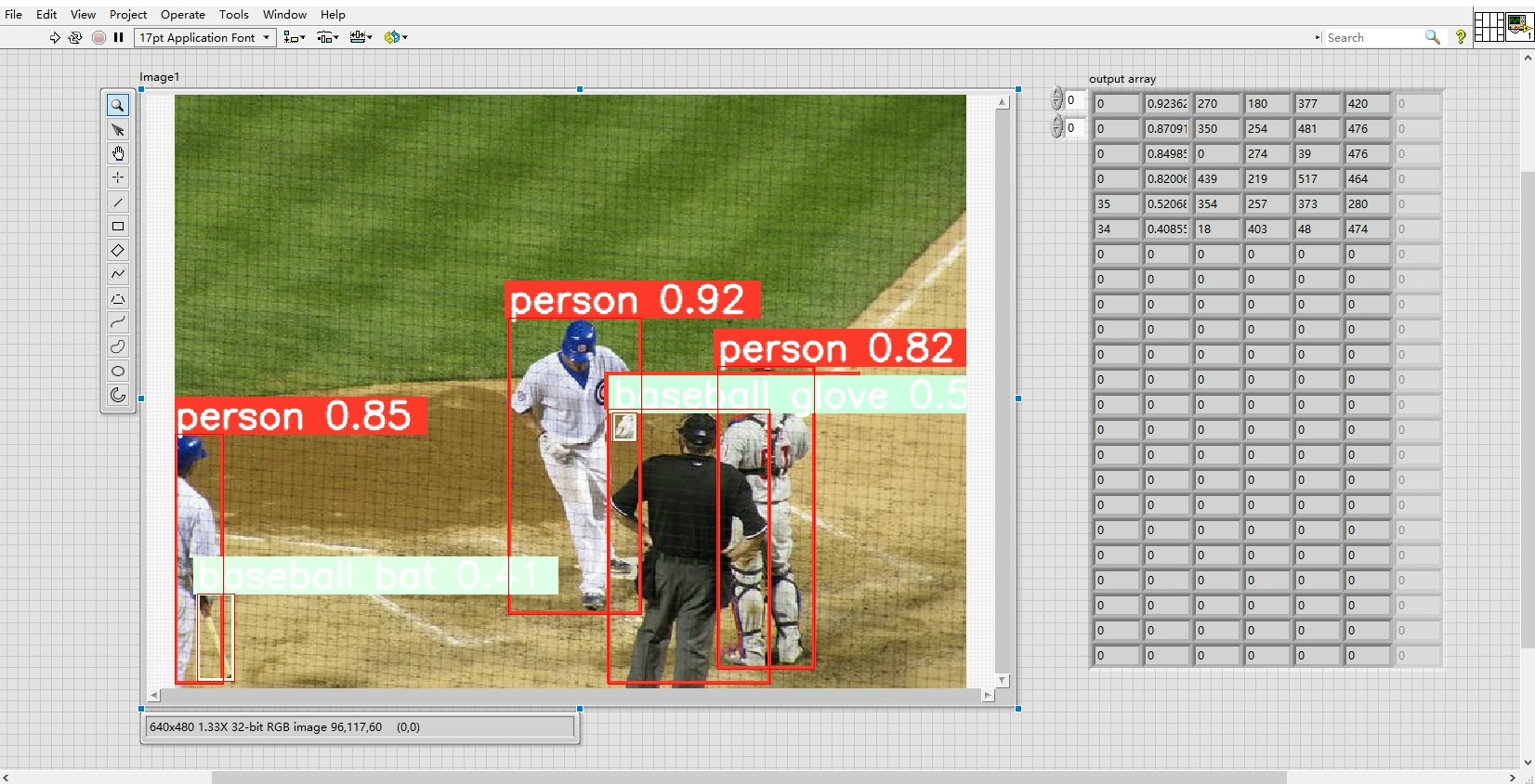
LabVIEW搞视觉项目总被人说是"小儿科",但这次咱用YOLOv5+ONNXRuntime整了个活——视频/图像目标检测框架,CPU/GPU随意切换,x86/x64通吃,还能多个模型同时开跑。labview yolov5目标检测onnxruntime推理,封装dll,labview调用dll,支持同时加载多个模型并行推理,可cpu/gpu, x86/x64位,识别视频和图片,cpu和gpu可选,
看着不断跳动的数字,仿佛能感受到神经网络在参数空间里蹦迪的节奏。这个变换矩阵会随机生成上下左右30度以内的旋转,配合HSV颜色抖动,让模型在虚拟世界里体验各种极端路况。直接扒开YOLOv5的代码仓库,迎面而来的utils文件夹里藏着不少好玩的工具。用register_buffer存anchor是个骚操作,既能让tensor跟着模型跑,又不参与梯度计算。就像在背包里藏了把瑞士军刀,需要的时候随手就能