




- @2503_92354576
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
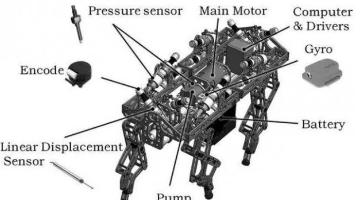
IMU是机器人感知自身运动状态的核心传感器,通过内置的加速度计与陀螺仪测量机器人的加速度与角速度,经算法解算后为机器人的控制、导航、平衡等功能提供关键数据,广泛应用于轮式机器人、足式机器人、无人机、机械臂等各类机器人系统中。加速度计:测量机器人三轴线性加速度,ER-MIMU-064 加速度计量程 30g,零偏稳定性(10s 1σ)<50ug,零偏重复性 100ug,非线性系数 < 100ug/g²
当管道埋设在地下,尤其是穿越河流、公路、铁路或城市区域时,我们很难从地表精确知道其三维空间位置是否与设计一致,或者随着时间推移是否发生了改变。
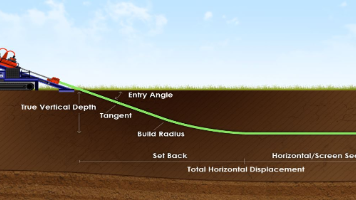
随钻测井是在钻井的同时实时测量地层岩石物理参数的方法,需要边钻边测,ER-Gyro-19能实现30s快速对准,方位精度1°,90s精确对准,方位精度0.5°,极大提高钻井成功率。ER-Gyro-19提供的方位角可以将测量到的地层特性(如电阻率)与方位关联起来,用于地质导向和地层评价。ER-Gyro-19基于惯性原理工作,不受金属套管磁场的影响,可以精确测量套管内测井仪器的方位。工具面角(1°/se
在小井斜与强磁干扰的双重挑战下,如何实现定向测量的高精度与低成本,一直是石油钻井、地质勘探和定向钻孔等领域的技术难题。长期以来,多数采用 “磁通门 + 传统陀螺工具” 的组合模式,在磁干扰较小的环境中采用磁通门进行定向,而在强磁干扰区则切换陀螺定向。然而,传统陀螺工具在小井斜段往往无法稳定输出高精度的方位角,甚至完全失效。若同时面临小井斜与磁干扰的复杂工况,传统技术路线便陷入两难。这种 “双工具组
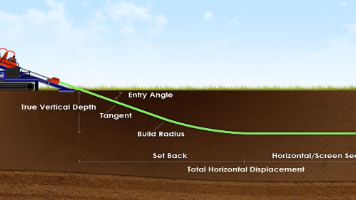
在定向钻孔与水平定向钻进(HDD)领域,依靠磁场定向的仪器因矿井、地下管网或强电磁场环境干扰失效,传统陀螺定向设备则受限于体积、功耗与抗振性。
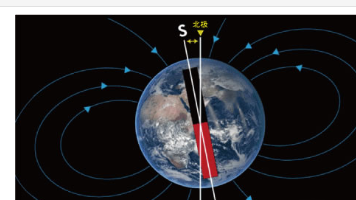
寻北IMU是一种无需依赖GPS或磁力计等外部参考,通过利用内置陀螺仪检测地球自转角分量,经过解算即可确定真北方向的IMU。与磁力计测量出的磁北不同,真北是固定不会改变的,是地球自转轴指向的方向。磁北由地球磁场决定,位置不固定。

从石油石化场景核心需求出发,ER-Gyro-15方位角精度覆盖 0.5° 至 1° 区间,井斜角对准精度稳定在 0.1°,陀螺工具面角精度为 1°/secL(L 代表纬度),确保 “方位 - 井斜 - 工具面” 三参数的测量可靠性。突破传统陀螺工具在小角度井斜段无法输出有效方位角的技术缺陷,井斜角≥1°时即可正常输出方位角、工具面角,井斜1°-2°时,方位角精度均控制在 3°以内,满足浅井、水平井
