- @2501_91479788
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
低空”一般指离地500米至3000米的空域,它介于民航高空航线与地面交通之间,过去因安全与管控原因,一直未被充分开发。•政策松绑:如“空域分类试点”、“空管机制改革”、“国家级低空试验区”逐步落地;•需求爆发:外卖、快递、安防、旅游等 C 端场景快速演进,倒逼空域基础设施升级。无人机制造大疆、极飞科技 、睿途低空技术硬核,场景多元。10分钟跨城不是梦。农业无人机种田、喷药、收成,减少人工成本,提升

我们致力于推动低空经济落地应用,从芯片、系统、调度,到每一条低空航线的开通。•🛸 eVTOL:电动垂直起降飞行器,未来城市通勤主力。这里不是一片混乱的天空,而是像高速公路一样,有层级、有规则、有秩序!•👨✈️ 直升飞机:让普通人也能“上天”的飞行工具。•🔌 城市接入节点:负责起降调度、能量补给、状态检测。➡️ 外卖、生鲜、快递包裹,从仓库飞到社区屋顶,只要几分钟。我们常说的“低空”,其实是

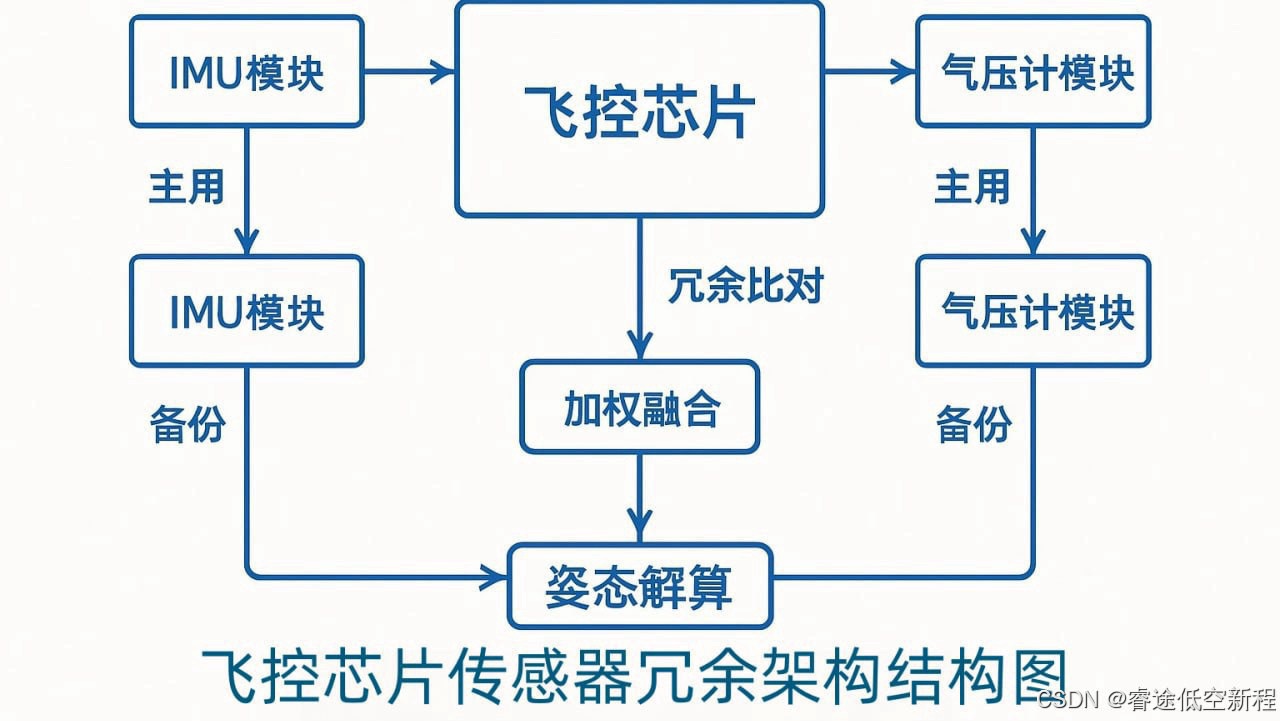
同时,国内厂商也在探索“通感算控一体化”**的飞行控制网络,将通信、感知、计算与控制深度融合,以适应未来城市低空交通的需求。典型的飞控芯片架构基于ARM Cortex-M系列微控制器,运行实时操作系统(如NuttX或ChibiOS)以及飞控算法软件(如PX4或ArduPilot),通过串口、I2C、SPI等接口与外部模块通信,实现闭环控制。飞控系统架构一般包括:惯性测量单元(IMU,包含陀螺仪和加
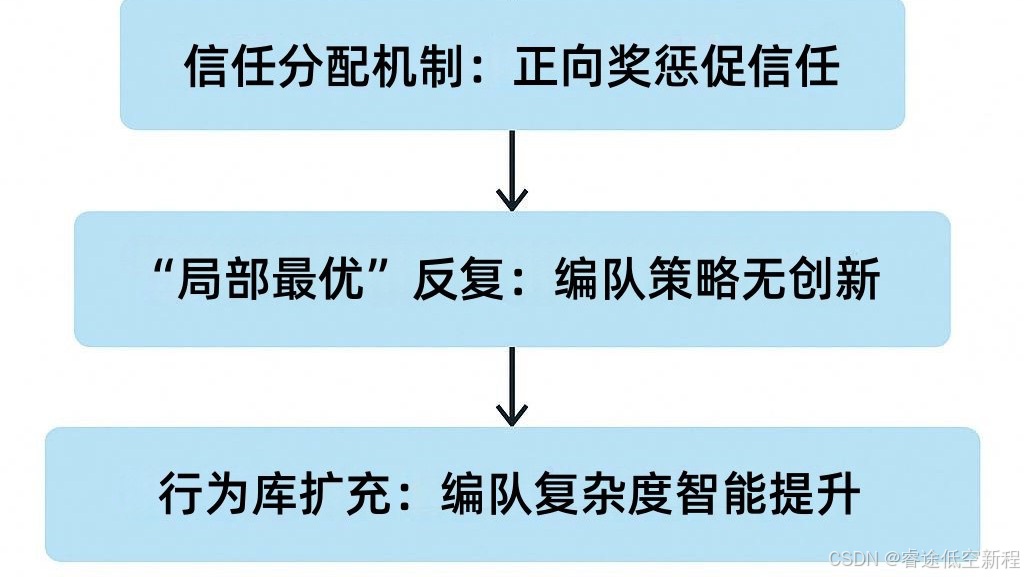
状态空间指数增长、协作策略博弈不稳定、算法对算力资源的高度依赖,使得当前的AI编队系统难以在边缘端实现实用化。本章聚焦于强化学习在编队系统中的具体瓶颈问题,并提出可行的优化路径:包括状态空间压缩、基于注意力机制的协同建模、与规则系统的混合训练框架设计等,以期推动AI编队系统走出“实验室可行,实际场景难落地”的困局。只有当状态建模具备泛化性、协作策略具备可解释性、推理机制具备部署适应性,AI集群才能
在武汉低空物流调度实践中,就建立了统一的数据协议:每架搭载RT-Gyro的无人机定时向指挥中心报告自己的空域位置和任务完成进度,而指挥中心则在需要时广播新的任务代号和航路调整指示。同时,RT-Gyro的任务脚本支持简单的队列调度逻辑:如果接收到新的任务请求但当前任务未完成,芯片可以根据预设策略决定任务优先级,或者请求调度中心介入。在飞行调度系统的“大脑”统一指挥下,RT-Gyro充当每架无人机稳定

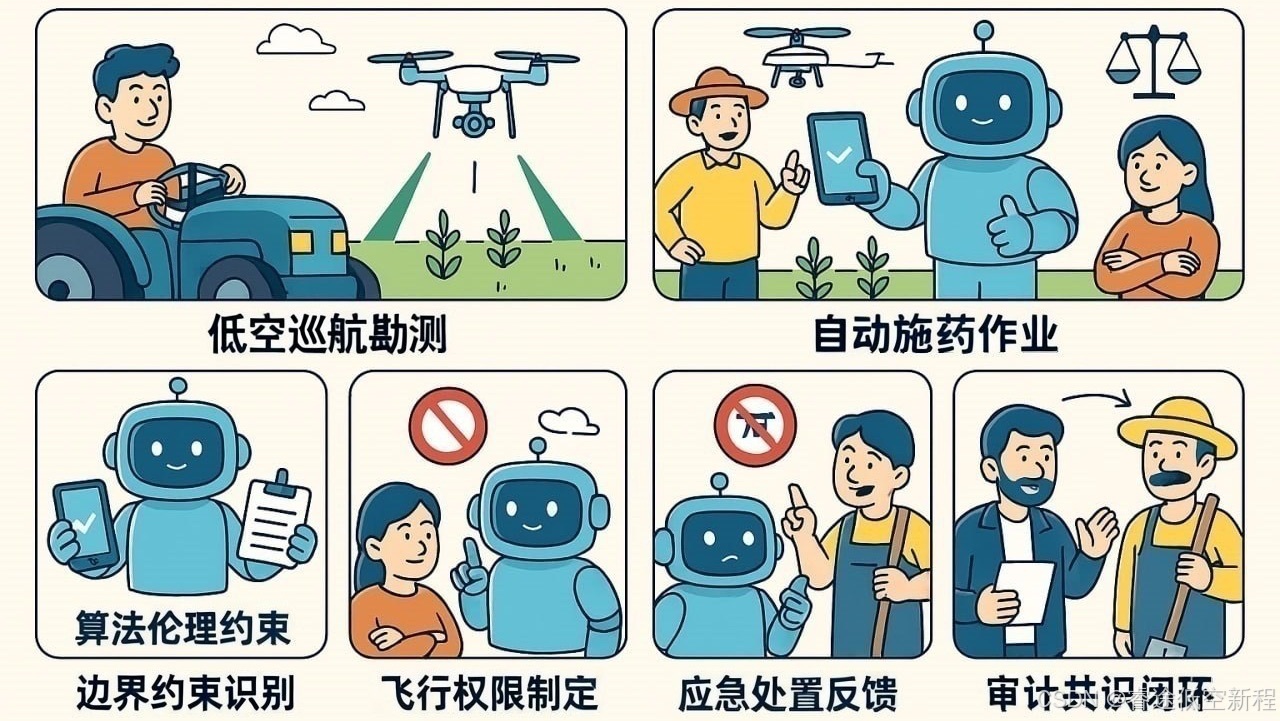
随着AI模型在城市低空经济中的部署频率、响应速度与自适应能力不断提升,其背后的算法演化逻辑已不再是“单次部署、静态运行”,而转向“动态更新、自主学习、连续演进”的自治模式。本章提出“伦理沙盒”制度作为系统解法,允许算法在“可观测、可回滚、可协商”的边界内进化,并建立配套的“责任人制度”“风险映射模型”“公众协审机制”与“伦理回退通道”,实现算法责任从静态认定向动态绑定演化的治理跃迁。本章提出的伦理

同时,国内厂商也在探索“通感算控一体化”**的飞行控制网络,将通信、感知、计算与控制深度融合,以适应未来城市低空交通的需求。典型的飞控芯片架构基于ARM Cortex-M系列微控制器,运行实时操作系统(如NuttX或ChibiOS)以及飞控算法软件(如PX4或ArduPilot),通过串口、I2C、SPI等接口与外部模块通信,实现闭环控制。飞控系统架构一般包括:惯性测量单元(IMU,包含陀螺仪和加
本章从项目现场出发,剖析AI模型自治飞行如何嵌入伦理沙盒机制,如何触发风险预警、协审反馈、模型回退等机制,并如何处理“飞错田”“任务误判”等现实问题。以“事中制衡+事后复盘”的方式,将伦理原则落地为可执行系统,展示了“算法可信”的具体路径。它不仅锻炼了系统的风控响应机制,更让平台与用户、与土地、与责任之间的关系,从“调度”走向了“共识”。6月7日,编号“PZ-FC-92”的模型在飞行后遭遇投诉:作