




- @2301_81461100
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
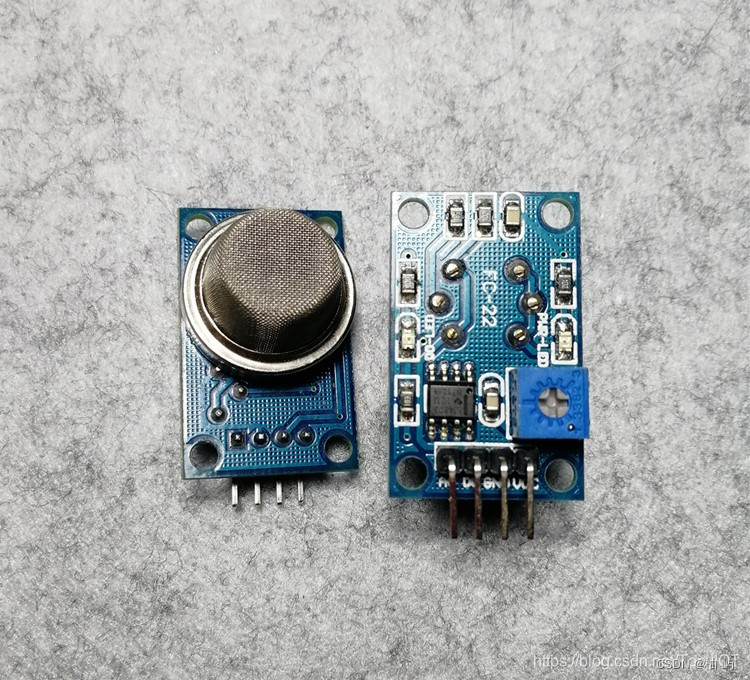
MQ系列传感器是使用非常广泛的低成本传感器,广泛应用于家庭或工厂的气体泄漏监测装置。本篇介绍MQ家族中的MQ-2烟雾传感器的使用,其他MQ传感器使用都是相类似的。1. MQ系列传感器工作原理MQ系列传感器使用的敏感材料是活性很高的金属氧化物半导体,传感器加热后,在不同气体浓度中电导率不同。使用简单的电路就可以将电导率的变化转换成与该气体浓度相对应的信号输出了。
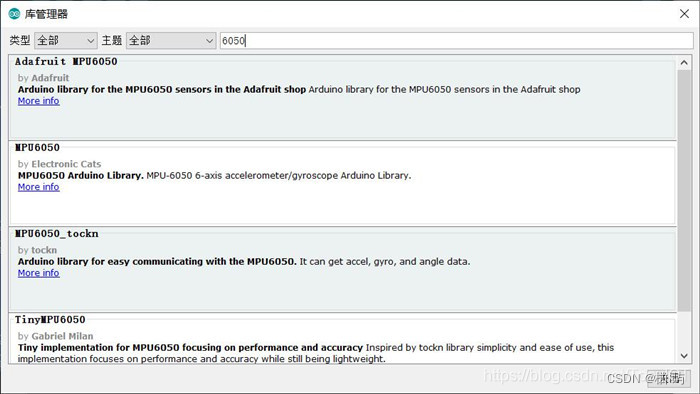
对于大多数MPU6050的应用来说,获取到的原始数据并没有多大用处,我们需要对原始数据进行姿态融合解算,最终得到姿态数据,也就是三个欧拉角:航向角(yaw)、横滚角(roll)和俯仰角(pitch)。MPU6050内部自带数字运动处理器(DMP)硬件加速引擎,配合运动驱动库直接输出四元数,进而很方便的计算出欧拉角,大大降低了主控MCU的负担。本篇使用MPU6050的驱动库来获取姿态数据。1. MP
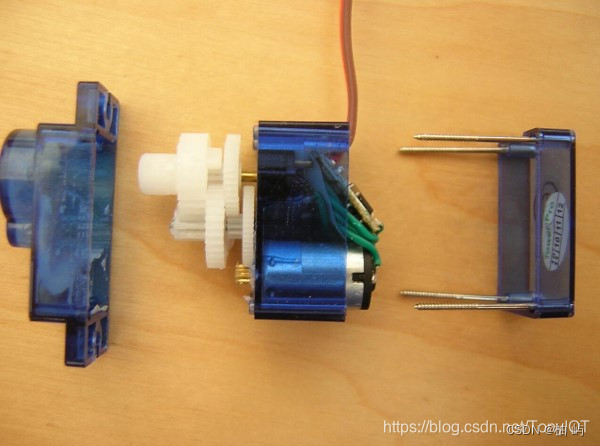
舵机是一种位置「角度」伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具、航模、机器人中已经得到普遍使用。舵机是一种俗称,其实是一种伺服马达。本篇通过官方驱动库来实现舵机控制。1. 舵机介绍结构组成舵机实际上是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。工作原理舵机内部有一个基准电路,产生周期为20ms、宽度为1.5ms的基准信号,
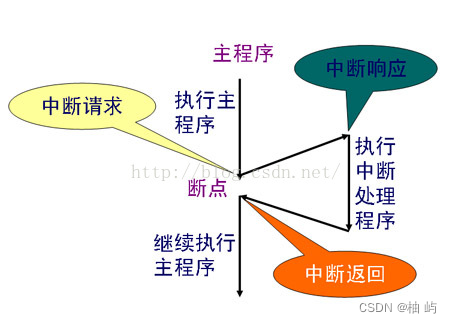
计算机也是一样,例如键盘输入,如果不采用中断技术,CPU将不断扫描键盘有否输入,经常处于等待状态,效率极低。而采用了中断方式,CPU可以进行其它的工作,只键盘有按键并发出中断请求时,才予以响应,暂时中断当前工作转去执行读取键盘按键,读完成后又返回执行原来的程序。但如果此时发生了某一事件B请求CPU迅速去处理(中断发生),CPU暂时中断当前的工作,转去处理事件B(中断响应和中断服务).待CPU将事件
上图中:LED压降约为1.7V,当GPO脚输出为5V时,电阻R两端电压为3.3V, 根据欧姆定律计算电流=3.3V / 1000 = 3.3mA.由于3.3mA电流通过 LED, 则LED将发光.数字IO脚有两个状态: HIGH 或 LOW,HIGH就是高电压(5V,表示1), LOW是低电压(0 V, 表示0).可以通过软件控制管脚的电平状态, 从而实现对外围设备的控制.模块有三个引出管脚,GN
图模块下方有三个管脚,构成输入回路,其中(图中右侧)标注‘-’的管脚接地(GND), 标注"+”的管脚接 5V, (图中左侧)标注‘S'的管脚接信号(数字I/O)模块上方是一个继电器输出回路,继电器有三个接线口(图中0, 1, 2),用电表量一下,0和1接线口之间是通的(常闭),0和2接线口之间是不通的(常开)2,当GPIO输出低电平,三极B极与E极间形成电压差,三极管E极与C极之间导通,电流通过

(所谓PWM, 指的是脉冲宽度调制,脉冲宽度调制可以用数字管脚按某种频率输出波形的 脉冲信号.单片机上某些数字IO口支持PWM功能, Arduino Nano的D3, D8支持PWM.对于无源蜂鸣器, 必须用PWM输出波形的脉冲信号,才能驱动它发声)但是, 从外观上并不能绝对的区分出有源与无源,最可靠的做法除了查看产品的参数手册以外. 另一种方式是使用万用表测试蜂鸣器电阻,只有8Ω或者16Ω的是无

在很多时候,需要和其他设备相互通讯,而最常见最简单的方式就是串口通讯。本篇介绍Arduino硬件串口通讯,了解相关函数的使用。1. 硬件串口在PC机上最常见的串行通讯协议是RS-232串行协议,而各种微控制器(单片机)上采用的是TTL串行协议,两者电平不同,需要经过相应电平转换才能进行相互通讯。Arduino Uno R3开发板上,硬件串口位于Rx(0)和Tx(1)引脚上,Arduino的USB口
随着科技的发展,人机交互也发生了翻天覆地的变化,从最开始的手动控制,到后来的遥控,再到语音识别以及图像识别。一切都是为了解放人类,毕竟能吵吵就不会动手对不对,现在都懒得吵吵了,图像识别分析就好。本篇我们来介绍高大尚的手势识别,用手比划就能进行控制了。1. APDS-9960模块介绍APDS-9960是一个体积非常小的传感器,它集成了非接触手势检测、接近检测、数字环境亮度测量和色彩检测等诸多功能。很
