




- @2301_80812699
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
PID控制算法是机器人、无人机、云台等闭环控制系统的核心,具有无需精确数学模型、计算量小、参数直观三大优势。其核心原理是通过比例(P)、积分(I)、微分(D)三项协同工作:P项快速响应当前误差,I项消除稳态误差,D项抑制震荡。工程应用中需注意参数调校顺序(先P后I再D)、积分饱和、微分噪声等问题。在云台自稳等场景中,PID通过实时补偿机械震动和姿态偏移实现精准控制。掌握PID算法就掌握了80%的机
PID控制算法是机器人、无人机、云台等闭环控制系统的核心,具有无需精确数学模型、计算量小、参数直观三大优势。其核心原理是通过比例(P)、积分(I)、微分(D)三项协同工作:P项快速响应当前误差,I项消除稳态误差,D项抑制震荡。工程应用中需注意参数调校顺序(先P后I再D)、积分饱和、微分噪声等问题。在云台自稳等场景中,PID通过实时补偿机械震动和姿态偏移实现精准控制。掌握PID算法就掌握了80%的机
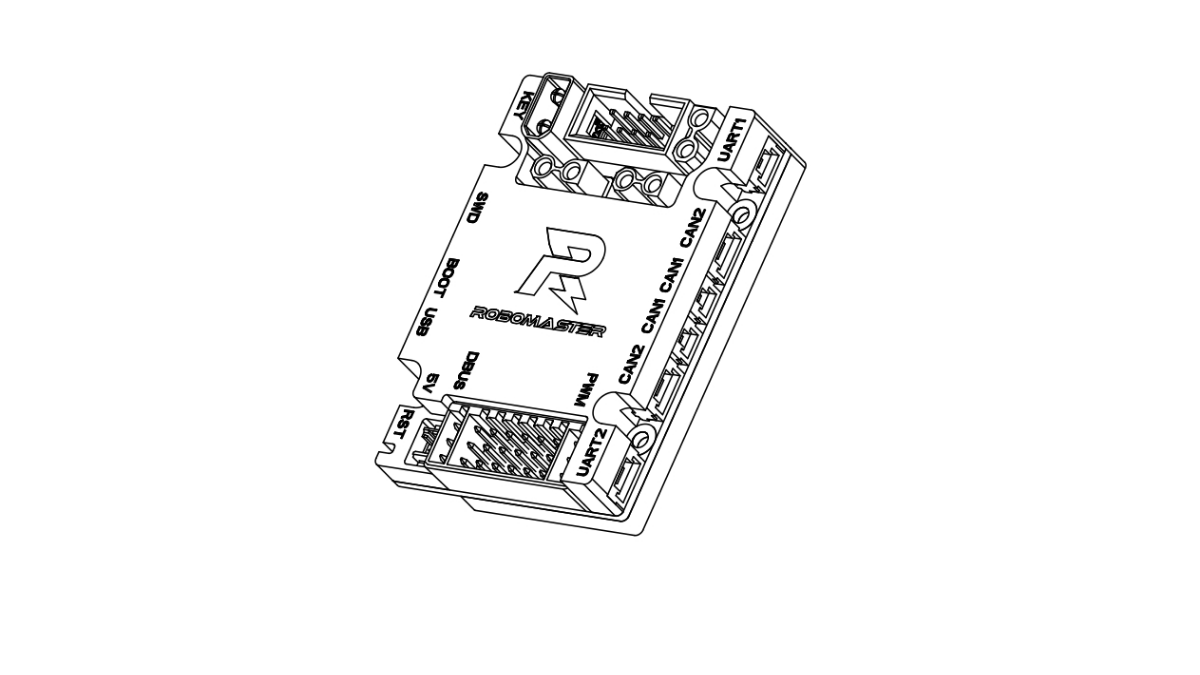
Prescaler是STM32中用于降低时钟频率的硬件模块,“Time Quantum(时间量子)”是CAN总线位时序的基本时间单元,预分频系数用于对CAN外设的输入时钟(通常由系统时钟或外设时钟派生)进行分频,得到“时间量子”的时长。点击左边的“Project”,根据上图配置工程,“Project Name”是工程名字,“Project Location”是工程存放位置,“Toolchain/I
声明:本文仅是自己的阅读笔记,不作为任何商业用途,大多数资料是通过大疆官网查询的,如有雷同,纯属巧合!!!一、大疆M3508电机1.大疆电机简介大疆M3508是大疆公司推出的一款高性能无刷直流电机,主要用于无人机、航模及机甲机器人等领域 。 2.驱动方式(1)、PWM驱动大疆的C620电调内部自带PID闭环控制,当使用PWM控制大疆3508电机搭配的C620电调时,只需要给电调发送占空比信号,电调
