- @2301_80760123
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
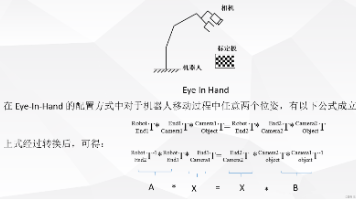
本文介绍了相机标定和手眼标定的核心概念与实现方法。相机标定主要获取内参(焦距、像素中心点)及临时外参,而手眼标定则确定相机与机器人坐标系间的变换关系。在Gazebo仿真环境中,可直接获取模拟内参和URDF文件中的标定参数,避免了真实环境中的硬件差异问题。文章详细说明了如何通过ROS2话题获取Gazebo中的相机内参矩阵,并解释了两种标定在机器人视觉系统中的关键作用。
摘要: 本文介绍了如何实现ROS2中rviz2和gazebo的联动配置。首先提供了上一节配置好的工作空间网盘链接,详细说明了.bashrc文件的可选修改步骤。接着讲解了功能包的整体运行逻辑,包括moveit2、rviz2和gazebo的交互关系。重点配置了Gazebo功能包结构,创建了controllers.yaml控制器配置文件,并编写了综合启动脚本gazebo_moveit.launch.py

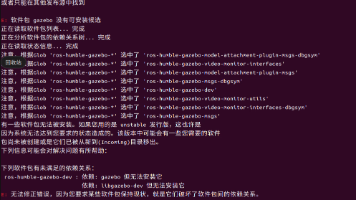
摘要: Gazebo Harmonic是新一代仿真工具,与ROS2 Humble兼容。安装步骤包括:1)添加官方软件源和密钥;2)执行sudo apt-get install gz-harmonic安装;3)通过gz sim --version验证。适用于Ubuntu系统,需先更新软件列表。
本文以宇树Go2四足机器人为载体,深入探讨了在NVIDIA Jetson Orin边缘计算平台上构建全栈视觉-语言-动作导航系统的技术方案。文章从ROS 2工作空间架构出发,详细解析了NaVILA模型的机理与分层导航实现,包括感知层、决策层和控制层的模块化设计。重点介绍了基于Client-Server架构的高性能边缘推理方案,以及NaVILA模型在空间认知方面的独特优势。通过预训练、指令微调和领域

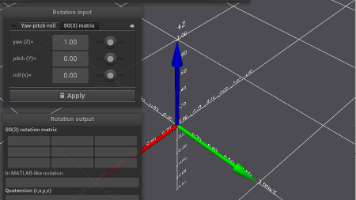
摘要:本文介绍了解决MRPT软件包3d-rotation-converter运行时出现GLX错误的方法。主要包括安装mrpt-apps软件包,通过修改.bashrc文件设置环境变量(包括指定OpenGL和GLSL版本号,禁用VMware SVGA10驱动,启用软件渲染等),最后验证解决方案的有效性。该方法成功解决了"Failed to create OpenGL 3.3 context&
【刘二大人】PyTorch深度学习实践笔记
本文介绍了反向传播算法的核心原理及其在深度神经网络中的应用。主要内容包括:1) 反向传播的动机——解决复杂神经网络参数梯度计算问题;2) 计算图理论基础,通过前馈和反馈过程分解复杂运算;3) 详细的双层神经网络实例推导,展示如何利用链式法则计算各层参数梯度;4) PyTorch实现的关键概念,如动态计算图、Tensor数据结构及其梯度相关属性。反向传播通过将梯度计算分解为局部操作,有效解决了深度神
【刘二大人】PyTorch深度学习实践笔记
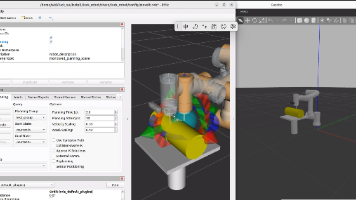
摘要:该研究在Gazebo和RViz中搭建了焊接仿真环境,包含白色工作台和预留间隙的黄色钢管。通过控制机械臂进行视觉扫描获取环境数据,规划末端执行器运动轨迹,完成焊接工艺仿真。相关演示视频和源文件可通过指定方式获取。
本文介绍了基于ROS2和MoveIt的机械臂末端固定点运动控制方法。首先通过C++代码创建move_to_pose节点,使用MoveGroupInterface设置目标位姿并规划运动轨迹。然后详细说明了工作空间配置流程,包括创建C++包、编写CMakeLists.txt文件、配置Launch文件以加载机器人参数。最后展示了如何编译运行程序,实现机械臂从当前位置移动到指定目标点的完整过程。文中还提供