
写文章




- @2301_80300770
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
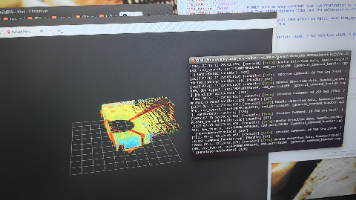
实机px4的fast-lio建图实现无人机起飞(已经实现)(大学经验分享)
这篇教程详细介绍了如何使用Livox Mid360雷达和FAST_LIO算法搭建无人机建图系统。作者从硬件配置(Livox Mid360雷达、Jetson Nano、PX4)开始,逐步指导安装Livox SDK2、ROS驱动,并解决配置过程中的IP设置问题。接着讲解了FAST_LIO建图系统的安装和错误处理方法,特别是Sophus库编译问题的解决方案。最后展示了系统运行效果,并预告后续将讲解FAS
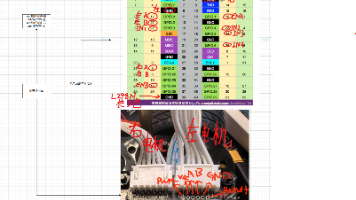
树莓派小车激光雷达从0到准确定位python和c++都能实现(大学经验分享)
本文详细介绍了如何从零开始制作一个基于树莓派4B的智能小车,并实现目标位置导航功能。硬件部分包括树莓派4B、L298N电机驱动模块、三轮小车底盘和二维激光雷达(镭神N10)。通过Python代码进行电机测试,确保硬件接线正确。接着,配置雷达驱动并使用RVIZ可视化雷达数据。随后,通过hector_slam进行实时建图,确保地图与坐标系的正确性。最后,提供了Python和C++两种控制代码,实现小车
树莓派小车激光雷达从0到准确定位python和c++都能实现(大学经验分享)
本文详细介绍了如何从零开始制作一个基于树莓派4B的智能小车,并实现目标位置导航功能。硬件部分包括树莓派4B、L298N电机驱动模块、三轮小车底盘和二维激光雷达(镭神N10)。通过Python代码进行电机测试,确保硬件接线正确。接着,配置雷达驱动并使用RVIZ可视化雷达数据。随后,通过hector_slam进行实时建图,确保地图与坐标系的正确性。最后,提供了Python和C++两种控制代码,实现小车
到底了