
万亿物理 AI 赛道,被空间数据“卡住了”,这家公司拿出了完整方案
从这个意义上讲,如视拿出的并不是某一个孤立的数据集或工具,而是一套面向物理 AI 的真实空间训练基础设施。当万亿级物理 AI 赛道被真实空间数据卡住,如视真正提供的,是从数据、场景、任务到训练闭环的完整方案。
物理 AI 正在成为 AI 产业新的关键词。从具身智能、智能汽车,到工业自动化、园区巡检和居家服务,越来越多的智能系统正在从屏幕走向真实世界。一个新的万亿级赛道似乎正在打开。
但当资本、模型和算力快速涌入之后,行业很快遇到了一个更底层的问题:物理 AI 想要真正落地,不能只靠更大的模型,还需要足够真实、足够复杂、足够高质量的空间数据。

当前,行业普遍面临三类底层瓶颈。
第一,真实交互数据获取成本高。物理 AI 的训练和迭代高度依赖实景数据,但线下测试耗时耗力、成本高昂,很多长尾场景和特殊工况也难以被系统采集。
第二,Sim2Real 仍然存在明显鸿沟。虚拟仿真可以降低训练成本,但很多仿真环境在视觉效果、空间布局、物理规则和场景复杂度上,与真实世界仍有明显差距。模型在虚拟环境中训练出的能力,迁移到现实场景后往往出现衰减。
第三,数据生产链路断裂。完整的物理 AI 训练,并不是简单收集一批图像或视频,而是需要形成“采集—结构化—任务化—训练—反馈”的闭环。目前行业内大量空间数据仍停留在基础视觉信息层面,缺少空间结构、业务语义、任务标注和持续迭代能力。
物理 AI 真正需要的,不是一批一次性交付的素材,而是一套能够持续生产、加工、增强和交付真实空间数据的训练体系。
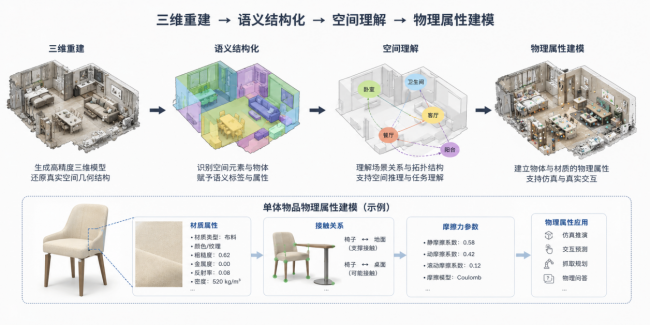
这正是如视的独特位置。如视过去多年所构建的能力,并不只是空间采集或三维展示,而是从真实空间出发,形成了一套覆盖“采集→三维重建→语义结构化→任务生成→高保真增强→开放交付”的全链路数字空间训练体系。

在这套链路中,真实空间首先被高精度采集和三维重建,转化为具备尺度、结构和拓扑关系的数字空间;随后,空间中的区域、对象、动线和业务语义被进一步结构化,形成可计算、可理解、可复用的数据资产;在此基础上,如视还可以围绕不同训练目标生成任务样本、漫游视频、多视角数据、3DGS 场景数据以及适用于具身智能训练和评测的空间样本。
这意味着,真实空间不再只是被还原和展示,而是可以被持续理解、持续加工,并进一步转化为适合物理 AI 训练、评测和迭代的多样化数据形态。
相比单纯提供某个模型、某批素材或某类场景,如视的核心优势在于,它具备从真实空间数据生产到训练交付的完整闭环。
在数据规模层面,如视已经沉淀了 5800 万+真实三维空间数据,覆盖城市空间、居住空间、工业厂区、商业综合体等多元业态。这些数据并不是简单影像,而是具备空间结构、语义信息和场景关系的高质量训练样本,可以帮助物理 AI 理解哪里可通行、哪里存在遮挡、不同区域如何连接、设备与环境之间如何相互约束。
在技术链路层面,如视进一步构建了 Real2Sim2Real 技术闭环。
Real→Sim 阶段,如视通过高精度空间采集与重建技术,将线下真实场景转化为高仿真、富含业务语义的数字孪生环境,从源头缩小虚拟与现实之间的差距。
Sim 阶段,企业可以在虚拟孪生环境中低成本、安全地完成算法训练和策略验证,避开真实场景测试中的高风险、高损耗和高成本。
Sim→Real 阶段,在虚拟环境中训练成熟的模型可以进一步部署到真实场景中;设备在现实运行中产生的新数据,又可以回流至虚拟场景,动态优化仿真环境,形成持续进化的训练闭环。

这套能力的价值在于,它不是单点解决“数据不够”的问题,而是把真实空间采集、数字孪生构建、任务生成、模型训练、仿真验证和现实反馈串成了一条完整链路。
对于具身智能公司、智能汽车企业、工业自动化厂商和园区机器人团队来说,这意味着研发不必完全依赖昂贵的线下反复试错,也不必困在过于理想化的仿真环境里。它们可以基于如视的真实空间数据和数字孪生能力,更快获得贴近真实业务场景的训练与评测环境。
过去,如视帮助行业把真实空间搬到线上,解决的是“看见空间”的问题。
但在物理 AI 时代,数字空间的价值正在被重新定义。
空间不再只是静态展示对象,而是可以被 AI 理解、学习、训练和反馈的动态载体。它既是模型认知真实世界的入口,也是机器人、智能汽车和自动化设备走向真实生产场景的训练场。
从这个意义上讲,如视拿出的并不是某一个孤立的数据集或工具,而是一套面向物理 AI 的真实空间训练基础设施。当万亿级物理 AI 赛道被真实空间数据卡住,如视真正提供的,是从数据、场景、任务到训练闭环的完整方案。
更多推荐
 0
0 0
0- 0



 已为社区贡献4154条内容
已为社区贡献4154条内容

所有评论(0)