
分布式训练架构技术细节(代码篇)
分布式训练架构解析:从单机到超大规模集群的技术演进 摘要:本文深入剖析分布式训练架构的核心技术,包括数据并行和模型并行策略。数据并行通过All-Reduce算法实现高效梯度同步,突破单机内存限制;模型并行则采用张量并行技术将大模型拆分到多设备。文章详细介绍了Ring-AllReduce的实现原理和Transformer层的张量并行实现方案,展示了现代分布式训练系统如何解决单机极限问题,实现高效的大
·
深入解析分布式训练架构的技术细节。这不是简单的"多卡训练",而是一个涉及通信拓扑、并行策略、内存管理和调度优化的复杂系统。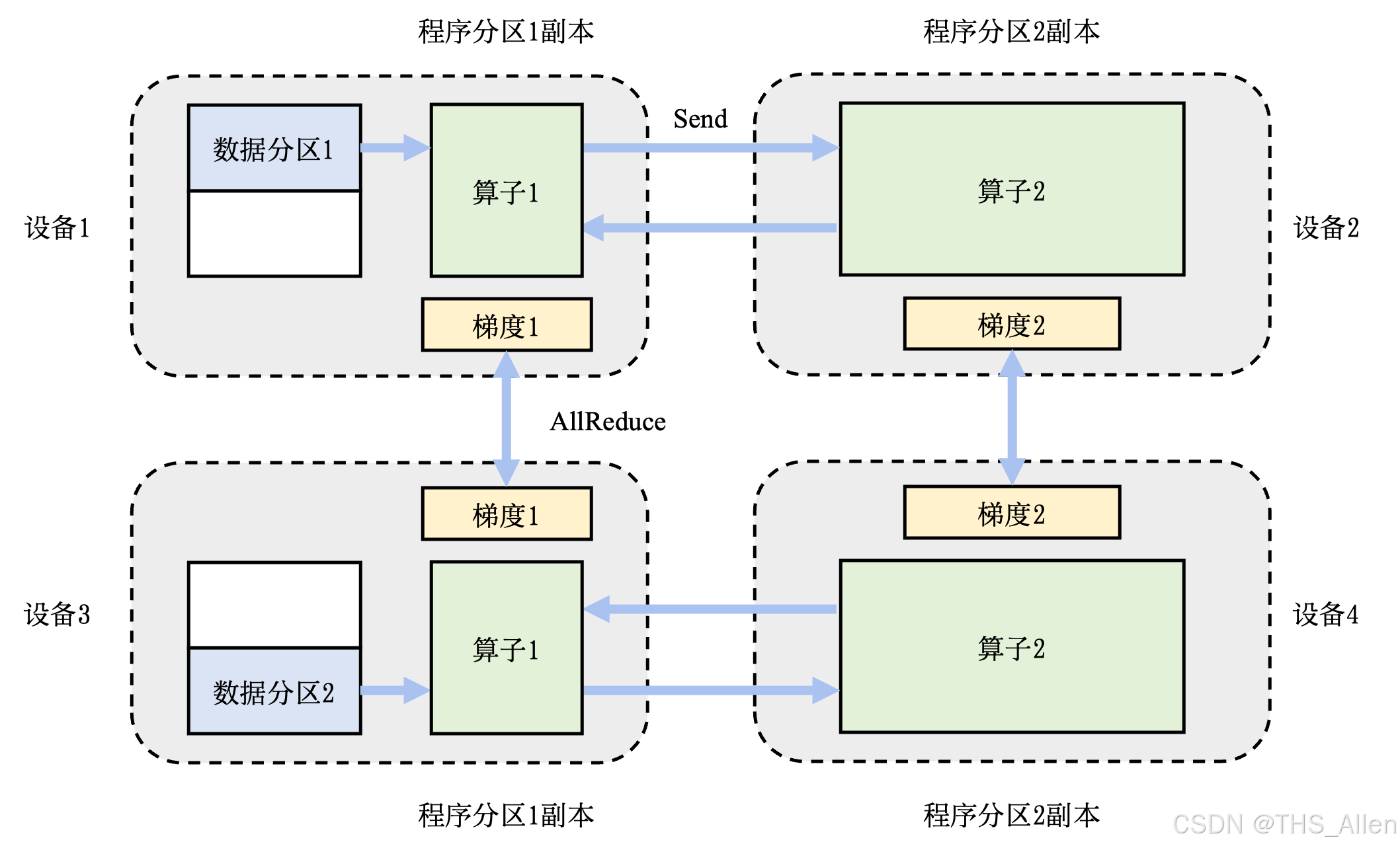
一、分布式训练核心挑战与架构演进
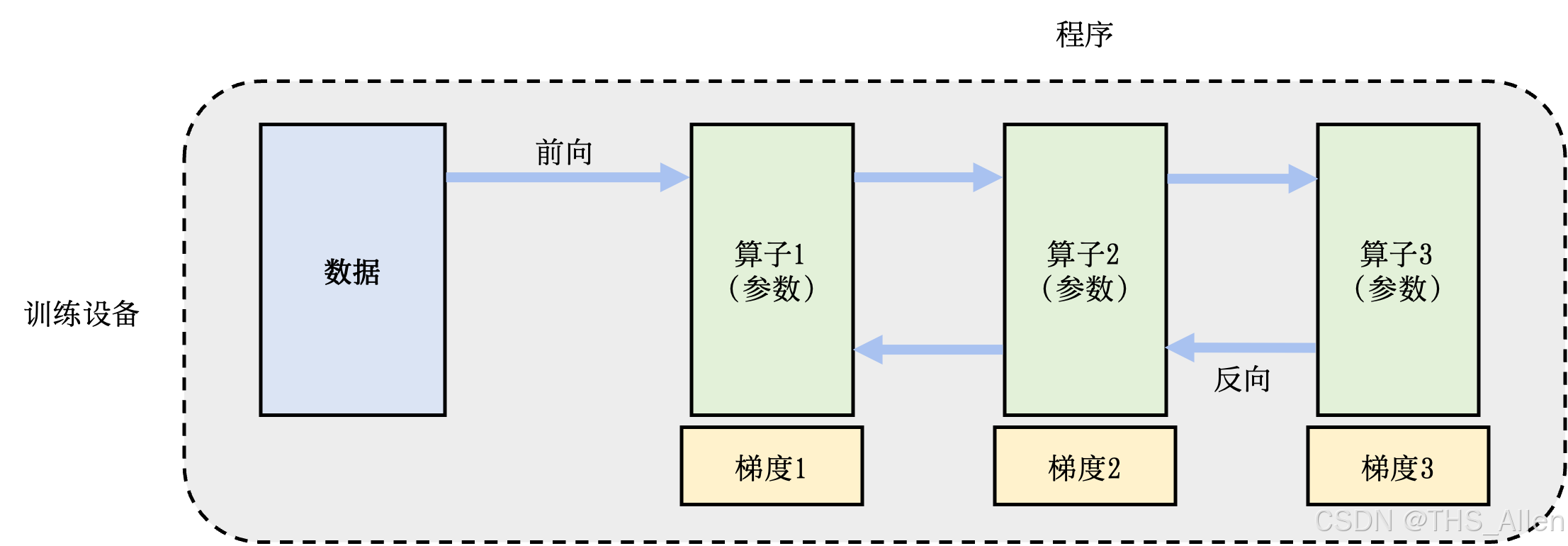
1.1 根本问题:单机极限
# 单机训练的资源瓶颈
class SingleNodeLimits:
def __init__(self):
self.gpu_memory = 80 * GB # A100/H100
self.pcie_bandwidth = 64 * GB/s # PCIe 4.0 x16
self.model_size_limit = 200 * GB # 实际约100B参数模型
self.training_time = "weeks to months"
1.2 分布式训练演进路径
单机单卡 → 单机多卡 → 多机多卡 → 超大规模集群
二、核心并行策略深度解析
2.1 数据并行:最基础的分布式模式
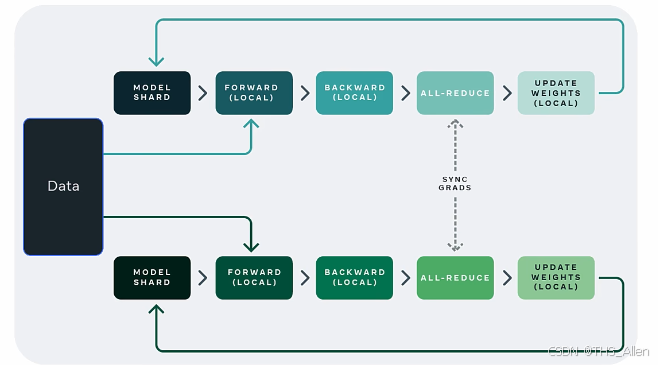
2.1.1 基础架构
class DataParallelBasics:
def __init__(self, model, world_size):
self.model = model
self.world_size = world_size
def training_step(self, batch):
# 1. 数据分片
local_batch = self.split_batch(batch, self.world_size)
# 2. 每个GPU上前向传播
local_output = self.model(local_batch)
# 3. 计算本地梯度
local_loss = self.criterion(local_output)
local_loss.backward()
# 4. 梯度全局同步 (关键步骤!)
self.average_gradients()
# 5. 参数更新
self.optimizer.step()
2.1.2 梯度同步算法对比
// 方案1: Parameter Server (传统但低效)
// 工作节点 → 参数服务器 → 工作节点
void parameter_server_sync() {
// 所有worker发送梯度到PS
for (int i = 0; i < num_workers; i++) {
send_gradients_to_ps(worker_grads[i]);
}
// PS聚合梯度
averaged_grads = average_all_gradients();
// PS广播聚合后的梯度
for (int i = 0; i < num_workers; i++) {
broadcast_gradients_to_worker(averaged_grads, i);
}
}
// 方案2: All-Reduce (现代高效方案)
void all_reduce_sync() {
// 使用Ring-AllReduce或Tree-AllReduce
// 所有节点平等参与,无单点瓶颈
ring_allreduce(local_gradients, global_gradients, world_size);
}
2.1.3 All-Reduce算法详解
Ring-AllReduce 实现原理:
class RingAllReduce:
def __init__(self, rank, world_size):
self.rank = rank
self.world_size = world_size
self.left_neighbor = (rank - 1) % world_size
self.right_neighbor = (rank + 1) % world_size
def all_reduce(self, tensor):
# 阶段1: Scatter-Reduce
chunk_size = tensor.numel() // self.world_size
for step in range(self.world_size - 1):
send_chunk_idx = (self.rank - step) % self.world_size
recv_chunk_idx = (self.rank - step - 1) % self.world_size
# 发送当前块,接收邻居块
send_chunk = tensor[chunk_size*send_chunk_idx:
chunk_size*(send_chunk_idx+1)]
recv_chunk = torch.empty_like(send_chunk)
# 非阻塞通信
isend(send_chunk, self.right_neighbor)
irecv(recv_chunk, self.left_neighbor)
wait_all()
# 累加接收到的块
tensor[chunk_size*recv_chunk_idx:
chunk_size*(recv_chunk_idx+1)] += recv_chunk
# 阶段2: All-Gather
for step in range(self.world_size - 1):
send_chunk_idx = (self.rank - step + 1) % self.world_size
recv_chunk_idx = (self.rank - step) % self.world_size
send_chunk = tensor[chunk_size*send_chunk_idx:
chunk_size*(send_chunk_idx+1)]
recv_chunk = torch.empty_like(send_chunk)
isend(send_chunk, self.right_neighbor)
irecv(recv_chunk, self.left_neighbor)
wait_all()
tensor[chunk_size*recv_chunk_idx:
chunk_size*(recv_chunk_idx+1)] = recv_chunk
2.2 模型并行:突破单卡内存限制
2.2.1 张量并行(Tensor Parallelism)
class TensorParallelLinear:
def __init__(self, in_features, out_features, device_mesh):
self.device_mesh = device_mesh
self.rank = device_mesh.get_rank()
# 按列拆分权重矩阵
self.shard_size = out_features // device_mesh.size()
self.local_weight = nn.Parameter(
torch.randn(in_features, self.shard_size,
device=device_mesh.device))
def forward(self, x):
# 本地计算部分结果
local_output = torch.matmul(x, self.local_weight) # [B, S, shard_size]
# 在所有设备间收集完整结果
global_output = all_gather(local_output, self.device_mesh)
# 拼接得到完整输出 [B, S, out_features]
return torch.cat(global_output, dim=-1)
2.2.2 Transformer层的张量并行实现
class TensorParallelTransformerLayer:
def __init__(self, hidden_size, num_heads, device_mesh):
self.device_mesh = device_mesh
# MLP层拆分
self.mlp_parallel = TensorParallelMLP(hidden_size, device_mesh)
# 注意力层拆分
self.attention_parallel = TensorParallelAttention(
hidden_size, num_heads, device_mesh)
def forward(self, hidden_states):
# 注意力并行计算
attention_output = self.attention_parallel(hidden_states)
# MLP并行计算
mlp_output = self.mlp_parallel(attention_output)
return mlp_output
2.2.3 流水线并行(Pipeline Parallelism)
class PipelineParallelModel:
def __init__(self, layers, devices):
self.devices = devices
self.num_stages = len(devices)
# 将模型层分配到不同设备
self.stages = []
layers_per_stage = len(layers) // self.num_stages
for i in range(self.num_stages):
start_idx = i * layers_per_stage
end_idx = start_idx + layers_per_stage
stage_layers = layers[start_idx:end_idx]
self.stages.append(nn.Sequential(*stage_layers).to(devices[i]))
def forward(self, x, micro_batches=4):
# 将输入拆分为微批次
micro_batch_size = x.size(0) // micro_batches
micro_batches = torch.chunk(x, micro_batches, dim=0)
# 流水线执行
activations = [None] * (micro_batches + 1)
activations[0] = [None] * len(micro_batches)
for stage_idx in range(self.num_stages):
current_device = self.devices[stage_idx]
for mb_idx in range(micro_batches):
# 将输入移动到当前设备
if stage_idx == 0:
input_mb = micro_batches[mb_idx].to(current_device)
else:
input_mb = activations[stage_idx-1][mb_idx].to(current_device)
# 在当前阶段计算
with torch.cuda.device(current_device):
output_mb = self.stages[stage_idx](input_mb)
activations[stage_idx][mb_idx] = output_mb
# 收集最终输出
return torch.cat(activations[self.num_stages-1], dim=0)
2.3 3D混合并行:现代大模型训练标准
class Hybrid3DParallel:
def __init__(self, model_config, parallel_config):
self.data_parallel_size = parallel_config['dp']
self.tensor_parallel_size = parallel_config['tp']
self.pipeline_parallel_size = parallel_config['pp']
# 计算总设备数
self.world_size = dp_size * tp_size * pp_size
def setup_parallelism(self, model):
# 1. 流水线并行:按层拆分到不同设备组
pipeline_groups = self.create_pipeline_groups()
# 2. 张量并行:在每个流水线阶段内按张量维度拆分
tensor_groups = self.create_tensor_groups()
# 3. 数据并行:复制完整的流水线-张量并行单元
data_parallel_groups = self.create_data_parallel_groups()
return HybridParallelModel(model, {
'pipeline': pipeline_groups,
'tensor': tensor_groups,
'data': data_parallel_groups
})
三、通信拓扑与硬件感知优化
3.1 硬件拓扑感知的设备放置
class TopologyAwarePlacement:
def __init__(self, cluster_info):
self.num_nodes = cluster_info['num_nodes']
self.gpus_per_node = cluster_info['gpus_per_node']
self.inter_node_bandwidth = cluster_info['inter_node_bw']
self.intra_node_bandwidth = cluster_info['intra_node_bw']
def optimize_device_mesh(self, parallel_config):
# 基于通信模式优化设备网格
# 张量并行:需要高带宽,优先放在节点内
# 数据并行:可以跨节点,对带宽要求较低
# 流水线并行:阶段间通信量中等
device_mesh = []
for pp_rank in range(parallel_config['pp']):
pp_group = []
for dp_rank in range(parallel_config['dp']):
# 为每个数据并行组创建张量并行组
tp_group = self.get_intra_node_group(parallel_config['tp'])
pp_group.append(tp_group)
device_mesh.append(pp_group)
return device_mesh
3.2 通信优化技术
3.2.1 通信计算重叠
class CommunicationOverlap:
def __init__(self, model, gradient_buffers):
self.model = model
self.gradient_buffers = gradient_buffers
def backward_with_overlap(self, loss):
loss.backward(retain_graph=True)
# 在计算梯度的同时开始通信
for param in self.model.parameters():
if param.grad is not None:
# 非阻塞通信
handle = dist.all_reduce(
param.grad,
op=dist.ReduceOp.AVG,
async_op=True
)
self.communication_handles.append(handle)
# 继续下一层的反向传播
# 通信在后台进行
3.2.2 梯度分桶与压缩
class GradientBucketing:
def __init__(self, bucket_size_mb=25):
self.bucket_size = bucket_size_mb * 1024 * 1024 # 25MB
def create_gradient_buckets(self, parameters):
buckets = []
current_bucket = []
current_size = 0
for param in sorted(parameters, key=lambda x: x.numel()):
param_size = param.numel() * param.element_size()
if current_size + param_size > self.bucket_size and current_bucket:
buckets.append(current_bucket)
current_bucket = []
current_size = 0
current_bucket.append(param)
current_size += param_size
if current_bucket:
buckets.append(current_bucket)
return buckets
class GradientCompression:
def compress_gradients(self, gradients, compression_ratio=0.01):
# 1. 梯度裁剪和稀疏化
flattened_grad = torch.cat([g.view(-1) for g in gradients])
# 2. 选择top-k梯度
k = int(flattened_grad.numel() * compression_ratio)
values, indices = torch.topk(flattened_grad.abs(), k)
# 3. 只通信重要的梯度
sparse_grad = (values, indices)
return sparse_grad
四、现代分布式训练框架实现
4.1 基于PyTorch Distributed的实现
import torch.distributed as dist
from torch.nn.parallel import DistributedDataParallel as DDP
class ModernDistributedTrainer:
def __init__(self, model, train_loader, config):
self.setup_distributed_environment(config)
self.model = self.wrap_model(model)
self.optimizer = self.create_optimizer()
def setup_distributed_environment(self, config):
# 初始化进程组
dist.init_process_group(
backend='nccl',
init_method='env://',
world_size=config['world_size'],
rank=config['rank']
)
# 设置设备
local_rank = config['local_rank']
torch.cuda.set_device(local_rank)
def wrap_model(self, model):
# 使用DDP包装模型
model = model.cuda()
model = DDP(
model,
device_ids=[self.local_rank],
output_device=self.local_rank,
find_unused_parameters=True,
gradient_as_bucket_view=True # 内存优化
)
return model
def training_epoch(self):
self.model.train()
for batch in self.train_loader:
# 将数据移动到当前设备
batch = self.move_to_device(batch)
# 前向传播
outputs = self.model(batch)
loss = self.criterion(outputs)
# 反向传播 (DDP自动处理梯度同步)
self.optimizer.zero_grad()
loss.backward()
# 梯度裁剪
torch.nn.utils.clip_grad_norm_(
self.model.parameters(),
max_norm=1.0
)
# 参数更新
self.optimizer.step()
# 可选的: 学习率调度
self.scheduler.step()
4.2 Megatron-LM风格的高级并行
class MegatronStyleParallel:
def __init__(self, model_config, parallel_config):
self.tensor_parallel_size = parallel_config['tp']
self.pipeline_parallel_size = parallel_config['pp']
def create_parallel_transformer(self):
# 列并行线性层
self.attention_dense = ColumnParallelLinear(
hidden_size,
hidden_size * 3, # Q, K, V
gather_output=False
)
# 行并行线性层
self.output_dense = RowParallelLinear(
hidden_size,
hidden_size,
input_is_parallel=True
)
def tensor_parallel_attention(self, hidden_states):
# 拆分QKV计算
mixed_x = self.attention_dense(hidden_states) # [s, b, 3h]
# 在张量并行组内拆分头
new_x_shape = mixed_x.size()[:-1] + (
self.num_heads, 3 * self.hidden_size_per_head)
mixed_x = mixed_x.view(*new_x_shape) # [s, b, n, 3h]
# 在最后一个维度拆分Q, K, V
last_dim = mixed_x.size(-1)
last_dim = last_dim // self.tensor_parallel_size
# 本地只处理部分头
local_mixed_x = mixed_x[...,
self.rank*last_dim:(self.rank+1)*last_dim]
# 本地注意力计算
local_q, local_k, local_v = torch.split(
local_mixed_x, self.hidden_size_per_head, dim=-1)
# ... 本地注意力计算
return local_attention_output
五、弹性训练与容错机制
5.1 动态节点调度
class ElasticTrainingManager:
def __init__(self, checkpoint_dir, min_nodes, max_nodes):
self.checkpoint_dir = checkpoint_dir
self.min_nodes = min_nodes
self.max_nodes = max_nodes
def monitor_cluster_health(self):
while True:
current_nodes = self.get_available_nodes()
# 节点数量变化处理
if len(current_nodes) != self.current_world_size:
self.handle_scale_event(current_nodes)
time.sleep(60) # 每分钟检查一次
def handle_scale_event(self, new_nodes):
# 1. 保存检查点
self.save_checkpoint()
# 2. 重新配置并行策略
new_parallel_config = self.recompute_parallel_config(new_nodes)
# 3. 重新初始化进程组
dist.destroy_process_group()
self.setup_distributed_environment(new_parallel_config)
# 4. 从检查点恢复
self.load_checkpoint()
5.2 检查点与恢复
class CheckpointManager:
def save_checkpoint(self, model, optimizer, step):
# 分布式保存检查点
if self.rank == 0:
# 主节点保存模型和优化器状态
checkpoint = {
'model_state_dict': model.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
'step': step,
'world_size': self.world_size
}
torch.save(checkpoint, f'checkpoint_{step}.pt')
# 所有节点等待保存完成
dist.barrier()
def load_checkpoint(self, checkpoint_path):
# 加载检查点并处理可能的世界大小变化
checkpoint = torch.load(checkpoint_path, map_location='cpu')
# 处理模型状态字典的形状不匹配
if checkpoint['world_size'] != self.world_size:
self.reshape_state_dict_for_new_world_size(
checkpoint['model_state_dict']
)
model.load_state_dict(checkpoint['model_state_dict'])
optimizer.load_state_dict(checkpoint['optimizer_state_dict'])
return checkpoint['step']
六、性能监控与调优
6.1 分布式训练指标收集
class DistributedMetrics:
def __init__(self):
self.communication_time = 0
self.computation_time = 0
self.idle_time = 0
def profile_training_step(self):
# 记录各阶段时间
comp_start = time.time()
# ... 前向传播和反向传播计算
comp_end = time.time()
comm_start = time.time()
# ... 梯度同步
comm_end = time.time()
self.computation_time += (comp_end - comp_start)
self.communication_time += (comm_end - comm_start)
def calculate_efficiency(self):
total_time = self.computation_time + self.communication_time
computation_efficiency = self.computation_time / total_time
# 理想情况下,计算效率应 > 80%
return computation_efficiency
6.2 自动并行策略搜索
class ParallelStrategySearcher:
def search_optimal_strategy(self, model_size, cluster_info):
strategies = self.generate_candidate_strategies(
model_size, cluster_info)
best_strategy = None
best_throughput = 0
for strategy in strategies:
estimated_throughput = self.estimate_throughput(
strategy, cluster_info)
if estimated_throughput > best_throughput:
best_throughput = estimated_throughput
best_strategy = strategy
return best_strategy
def estimate_throughput(self, strategy, cluster_info):
# 基于通信计算比的吞吐量估计
computation_time = self.estimate_computation_time(strategy)
communication_time = self.estimate_communication_time(
strategy, cluster_info)
# 考虑通信计算重叠
effective_time = max(computation_time, communication_time)
return strategy.micro_batch_size / effective_time
总结
现代分布式训练架构是一个多层次、多维度的复杂系统,其核心要点包括:
- 并行策略组合:数据并行、模型并行、流水线并行的有机结合
- 通信优化:All-Reduce算法、通信计算重叠、梯度压缩等技术
- 硬件感知:基于实际硬件拓扑的设备放置和通信优化
- 弹性容错:支持动态扩缩容和故障恢复
- 性能调优:基于监控数据的自动策略优化
成功的分布式训练系统需要在算法效率、硬件利用率和工程复杂度之间找到最佳平衡。随着模型规模的持续增长,分布式训练架构将继续向更细粒度、更自适应、更智能的方向演进。
更多推荐

 3
3 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)