
YOLOv11 无人机红外小目标检测-人工智能第118期
本文介绍基于YOLOv11n模型的无人机红外小目标检测项目,使用HIT-UAV数据集微调模型,实现对行人、车辆等目标的精准检测。项目提供完整的代码实现,包括环境配置指南、训练流程(支持Google Colab)、模型转换脚本(PT转ONNX)以及Flask接口部署方案。目录结构清晰,包含数据集配置、训练结果和API接口等核心组件。该技术特别适用于军事侦察领域,可提升无人机在复杂环境下的目标识别能力
YOLOv11 无人机红外小目标检测-人工智能第118期
1. 项目概述 | Project Overview
YOLOv11 无人机目标检测 YOLOv11
本仓库包含代码和资源,用于在HIT-UAV数据集上微调YOLOv11n模型,通过人工智能实现无人机对行人、车辆、自行车等目标的最优检测超参数。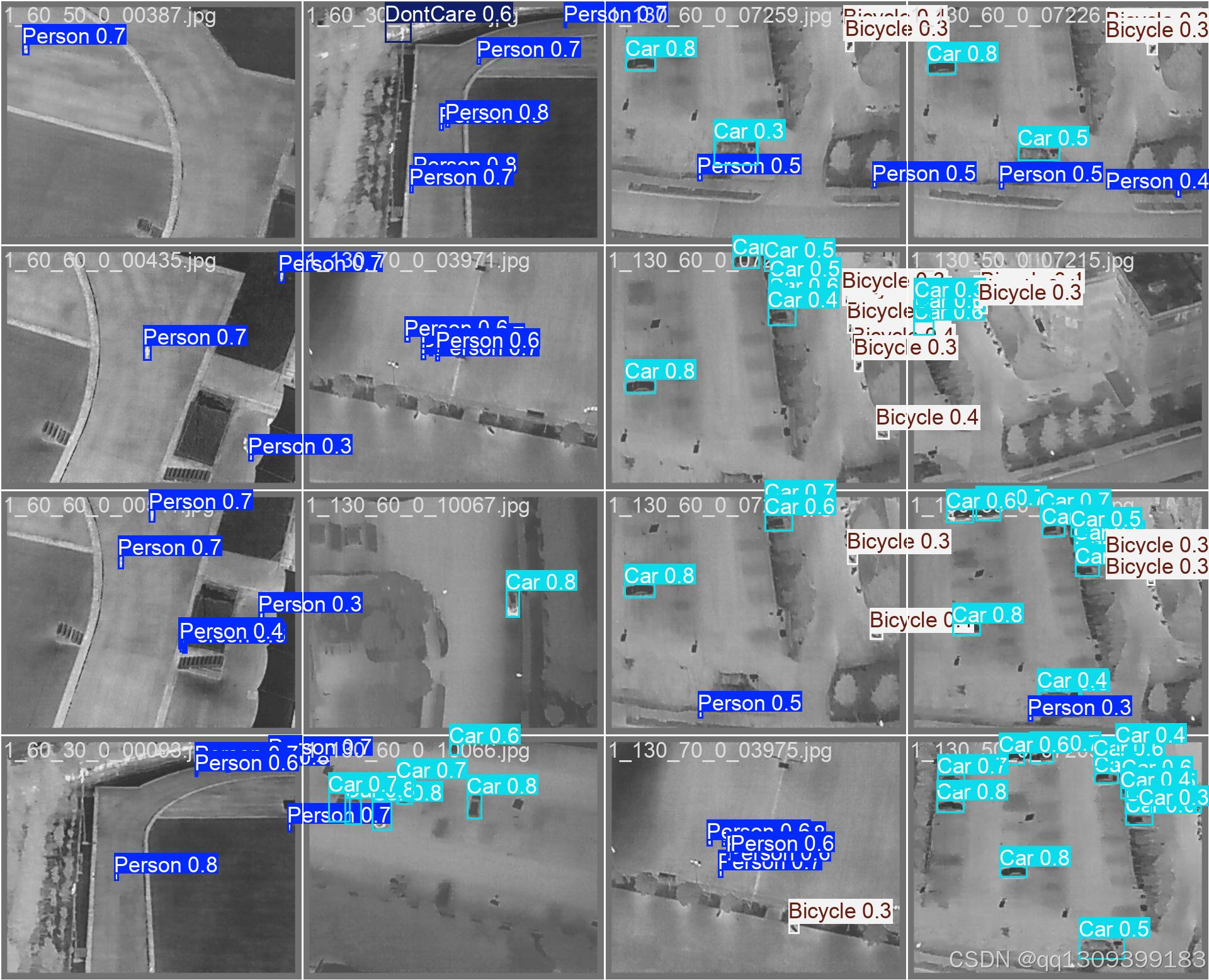
目录结构
项目概述
本项目采用Ultralytics最新发布的YOLOv11n模型,通过HIT-UAV数据集进行微调,显著提升无人机航拍图像中常见目标的检测精度。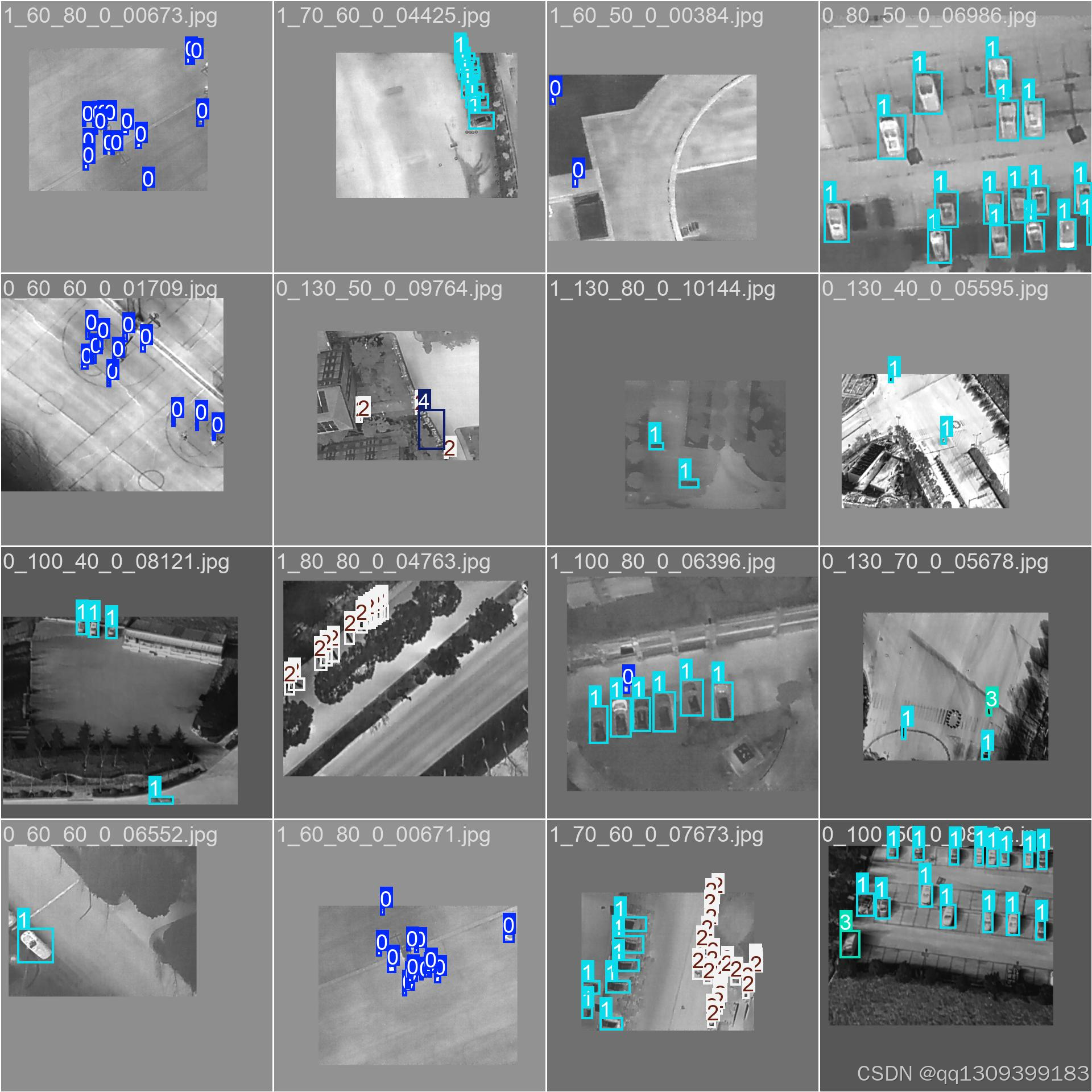
环境安装
本地环境配置步骤如下:
- 克隆仓库:
git clone https://github.com/your-repo-name.git
cd your-repo-name
- 安装依赖:
pip install -r requirements.txt
✍🏻作者简介:机器学习,深度学习,卷积神经网络处理,图像处理
🚀B站项目实战:Plato-AI的个人空间-Plato-AI个人主页-哔哩哔哩视频
😄 如果文章对你有帮助的话, 欢迎评论 💬点赞👍🏻 收藏 📂加关注+
🤵♂代做需求QQ:673276993
使用指南
环境配置完成后,可使用以下脚本进行训练和模型转换。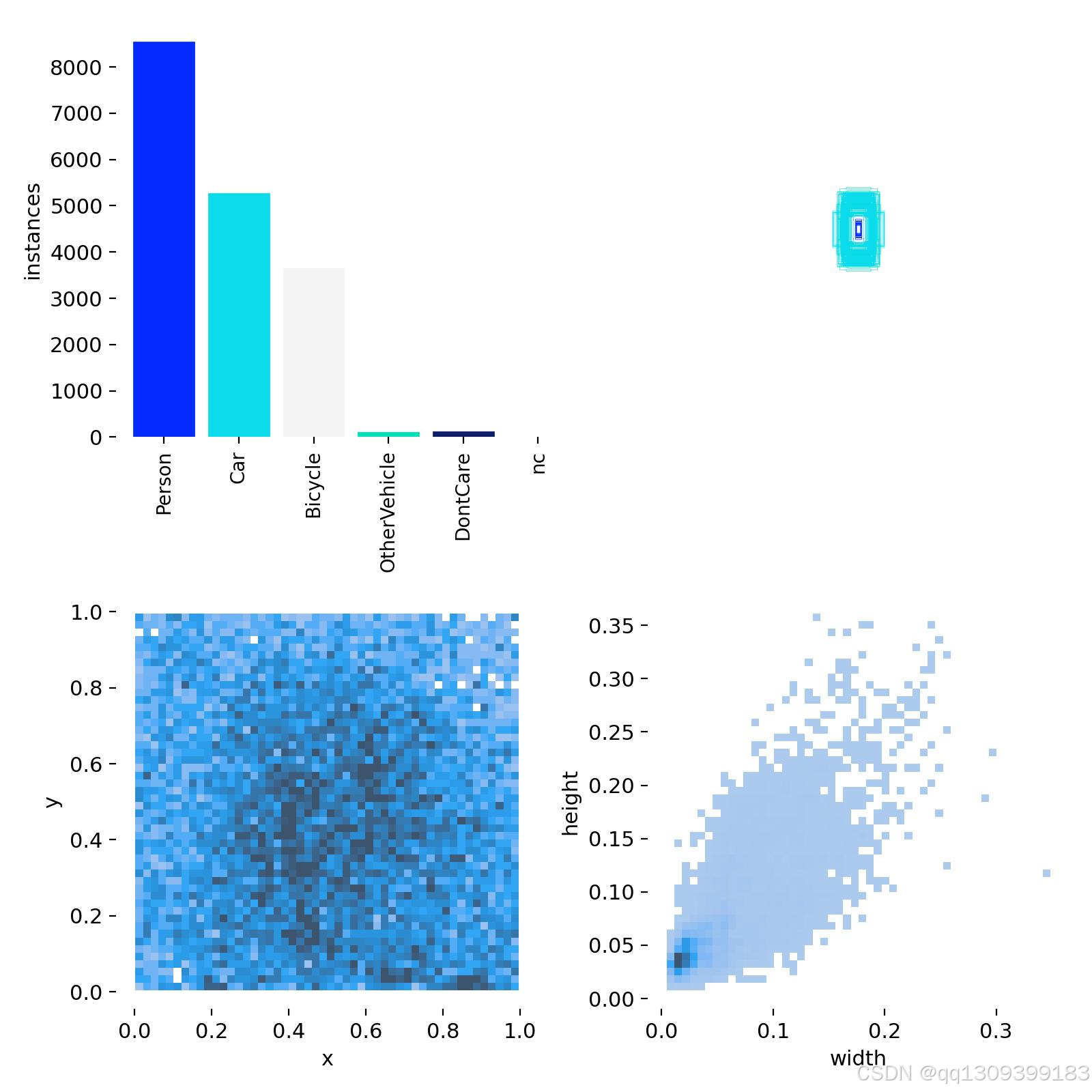
模型训练
训练流程详见YOLOv11_Trainning.ipynb笔记本。该笔记本在Google Colab环境运行(非本地),复现步骤:
- 在Colab中打开
YOLOv11_Trainning.ipynb1. 按指引加载数据集并训练模型
模型转换
通过convert_pt2onix.py脚本可将训练好的PyTorch模型(.pt格式)转换为ONNX格式:
python convert_pt2onix.py --weights path/to/model.pt
文件目录
关键目录说明:
api/ - YOLOv11 Flask接口
dataset/ - 示例数据集
training_results/ - 训练输出
2. 数据集配置 | Dataset Configuration
路径结构
Path Structure
path: /tmp/dataset
train: /tmp/dataset/images/train
val: /tmp/dataset/images/val
test: /tmp/dataset/images/test
names:
0: Person
1: Car
2: Bicycle
3: OtherVehicle
4: DontCare
nc: 5
3. 目录结构 | Table of Contents
4. 环境安装 | Installation
本地部署步骤
Local Setup Instructions
- 克隆仓库:
git clone https://github.com/your-repo-name.git cd your-repo-name - 安装依赖:
pip install -r requirements.txt - ---
5. 模型训练 | Training
Google Colab执行说明
Google Colab Execution
6. 模型转换 | Model Conversion
PyTorch转ONNX
PyTorch to ONNXpython convert_pt2onix.py --weights path/to/model.pt
7. 核心文件夹 | Folder Structure
|文件夹|描述
|------
|api/|YOLOv11 Flask API接口(含部署说明)
|dataset/|示例数据集与配置文件(需按训练笔记本修改dataset.yaml)
|training_results/|训练输出(超参数调优结果、权重文件、评估指标及性能图表)
8. 军事应用价值 | Military Applications
通过无人机视角精准检测人员、车辆等目标,可为军事侦察任务提供关键技术支持。
更多推荐

 12
12 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)