
基于视觉的五子棋人机对弈系统设计与实现
本文设计了一种融合计算机视觉与五子棋算法的智能对弈系统。系统采用上下位机架构,上位机基于OpenCV进行图像处理,通过灰度转换、分割缩放等技术解决手臂遮挡问题;下位机由STM32控制机械臂执行落子动作。研究重点在于开发低成本、简易化的对弈平台,通过模式识别和决策树算法实现精准棋子识别与落子。系统创新性地结合自适应补光技术,确保不同光照条件下的识别质量,为人工智能技术普及提供了实践案例。
近年来人工智能技术迅猛发展,深刻影响着各行业的技术变革。自AlphaGo问世以来,人机对弈已成为热门研究领域。传统棋类机器人多采用传感器检测或巡线检测模式,虽识别速度快、定位精准,但智能性不足且对普通棋盘适应性差。随着计算机视觉技术的普及,基于图像处理的智能系统在日常生活中得到广泛应用。本文设计了一种融合计算机视觉棋子定位与五子棋对弈算法的人机交互系统,使人们在娱乐中体验人工智能技术的魅力,对推动人工智能技术普及具有重要意义。
本系统旨在开发一套能够自动识别棋盘状态并记录棋谱的智能系统,结合模式识别与机械控制算法,构建低成本、简易化的五子棋人机对弈平台。系统采用先进的图像处理方法和五子棋决策树算法,通过STM32主控系统控制数字舵机执行落子动作。核心研究重点在于视觉识别技术——利用USB摄像头采集彩色图像,基于OpenCV神经网络视觉库进行图像处理,通过灰度转换提升处理效率,并运用水平旋转、分割和缩放技术消除下棋时手臂遮挡的影响。采用手动选取棋子模板方式提高识别准确率,关键挑战在于复杂不确定环境下正确识别棋子位置,特别是在人手遮挡情况下仍能准确定位。
系统架构设计
硬件系统总体方案
系统采用上下位机协同设计架构,具体组成如下:
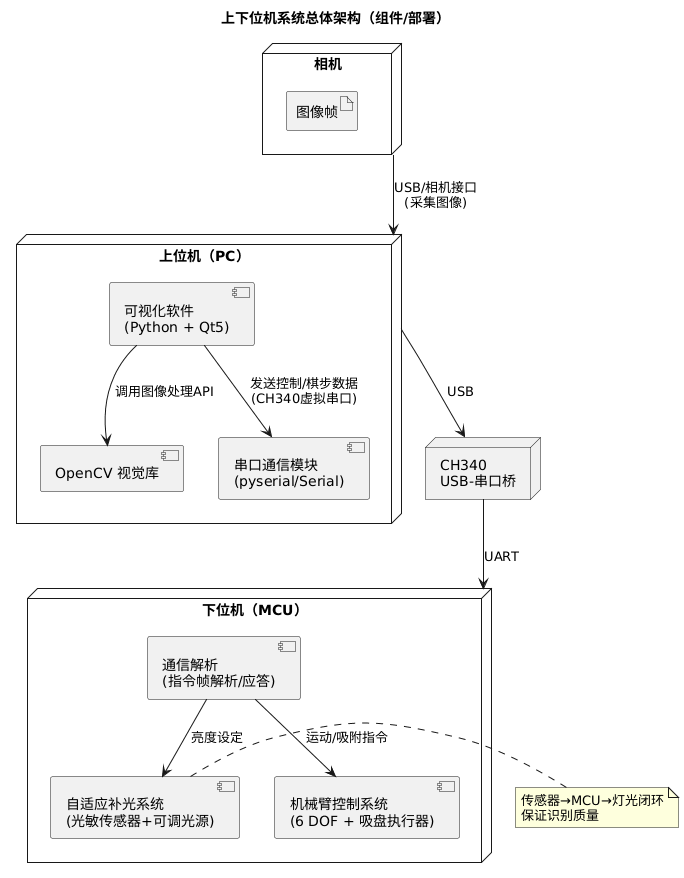
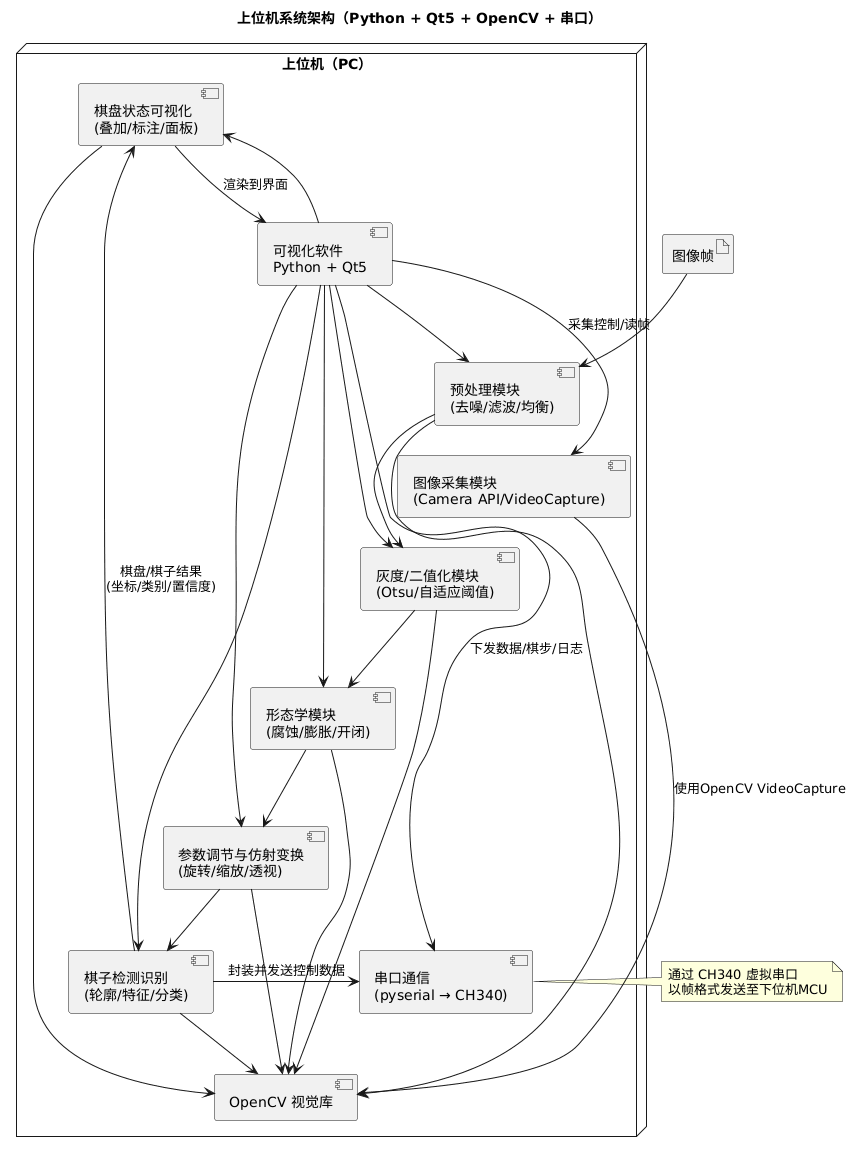
上位机系统主要负责图像采集与处理,运行于计算机端,采用Python编程结合Qt5框架开发可视化软件。该软件通过OpenCV视觉库实现以下功能:
下位机系统包含两个主要子系统:
- 机械臂控制系统:采用吸盘式6自由度机械臂,实现棋子夹取与精准落子
- 自适应补光系统:由光敏传感器和可调光源组成,通过光强反馈调节确保不同光照条件下的识别质量
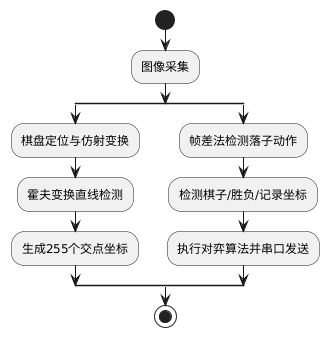
软件系统工作流程
核心算法与数学模型
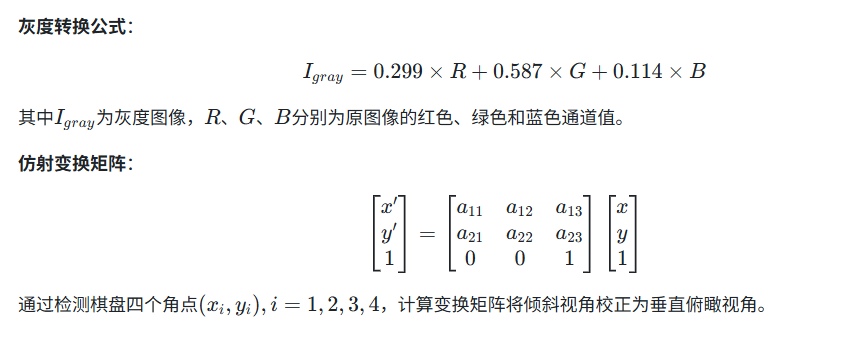
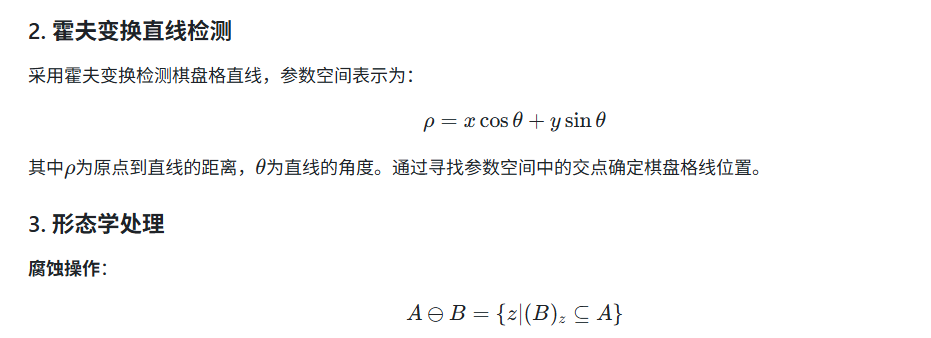
1. 图像预处理与棋盘定位
点击链接基于视觉的五子棋人机对弈系统设计与实现阅读原文
更多推荐

 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)