
【带畸变参数的逆相机模型投影仪标定下的单方向条纹3D重建研究报告】
介绍
这是一篇由Google Gemini Deep Research生成的一篇研究报告,解决了笔者在搭建单目条纹结构光Demo时思考的一个问题:条纹投影轮廓术中,使用带畸变参数的逆相机模型标定投影仪,标定完成后,如果仅投影单方向条纹,如何进行3D重建。
笔者最直接的想法是,根据标定的投影仪参数,对投射的条纹图进行反畸变补偿,这样只要计算相机视线投影到投影仪归一化平面的极线与等相位面直线的交点即可。但是由于笔者尚未打通投影仪驱动代码,只能用TI的官方软件投射简单的1D的条纹图案,这个想法无法实现。如果无法进行反畸变补偿,就需要考虑求解极线与等相位曲线的相交,解决起来会比较麻烦。于是笔者就想查阅一下,现有文献中由哪些解决方法,但是几番搜索,都没有查到相关文献。
正在笔者准备把这个问题当作未解疑问时,偶然看到了Gemini的Deep Research功能,于是就尝试看大模型是否能够解决笔者的问题。没想到结果出人意料,Gemini给出了一份详细的研究报告,列出了解决方法,并给出了笔者一直在搜索却没找到的相关文献。下面是Gemini的研究报告,虽然有少许内容说的是有问题的,但整体而言,还是解决了笔者的问题,不得不感叹AI工具的强大。
解决过程
问题:
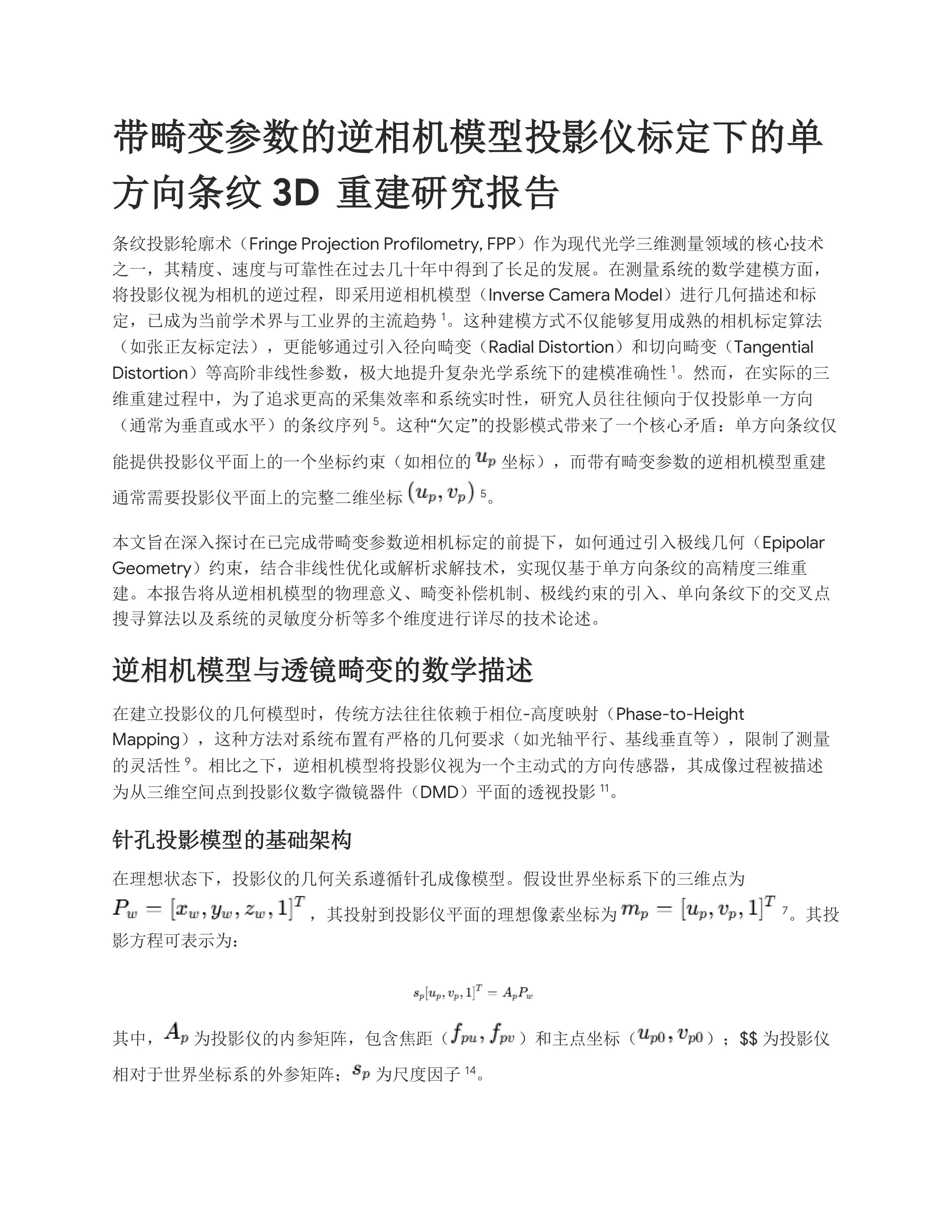
条纹投影轮廓术中,使用带畸变参数的逆相机模型标定投影仪,标定完成后,如果仅投影单方向条纹,如何进行3D重建?
Gemini思路:
单向条纹投影三维重建
研究网站
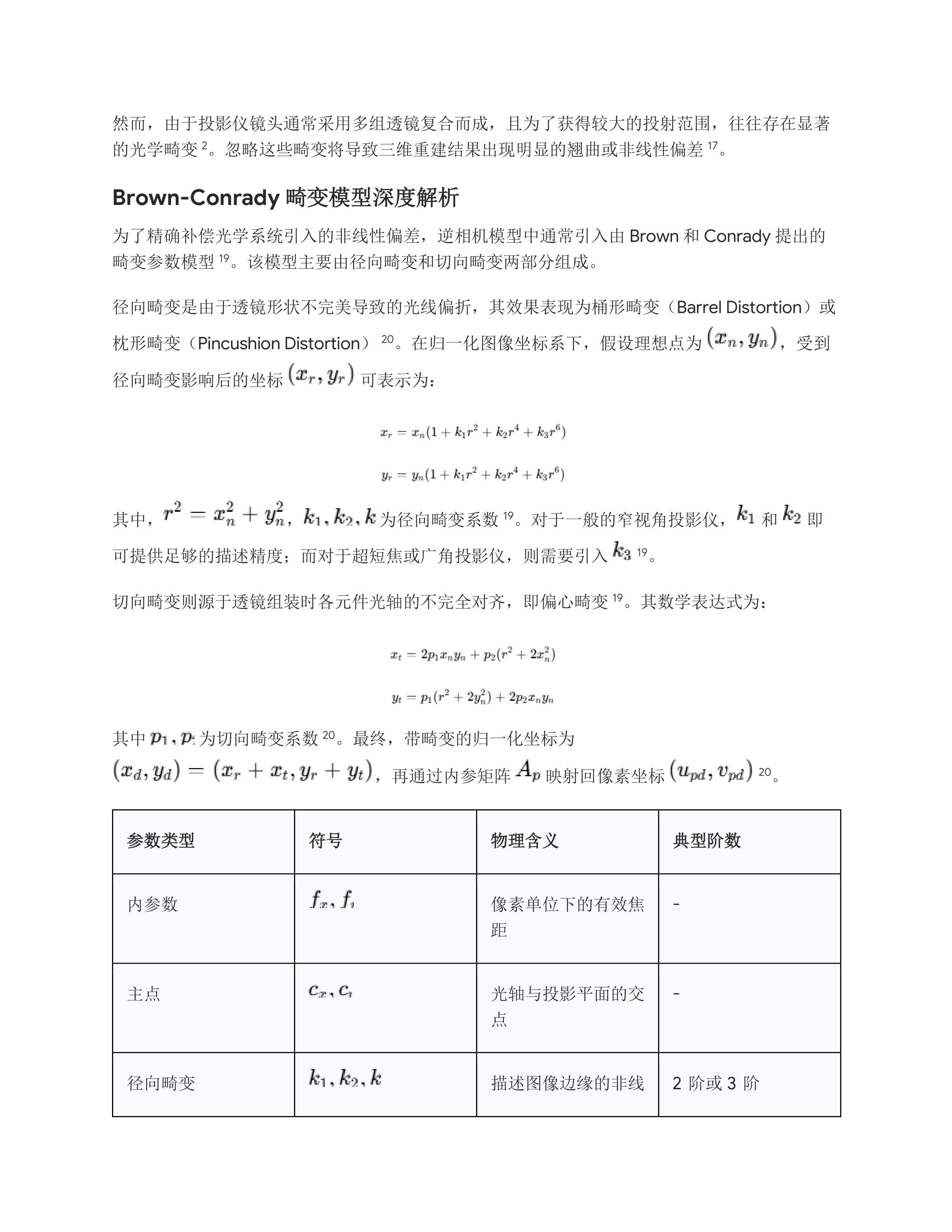
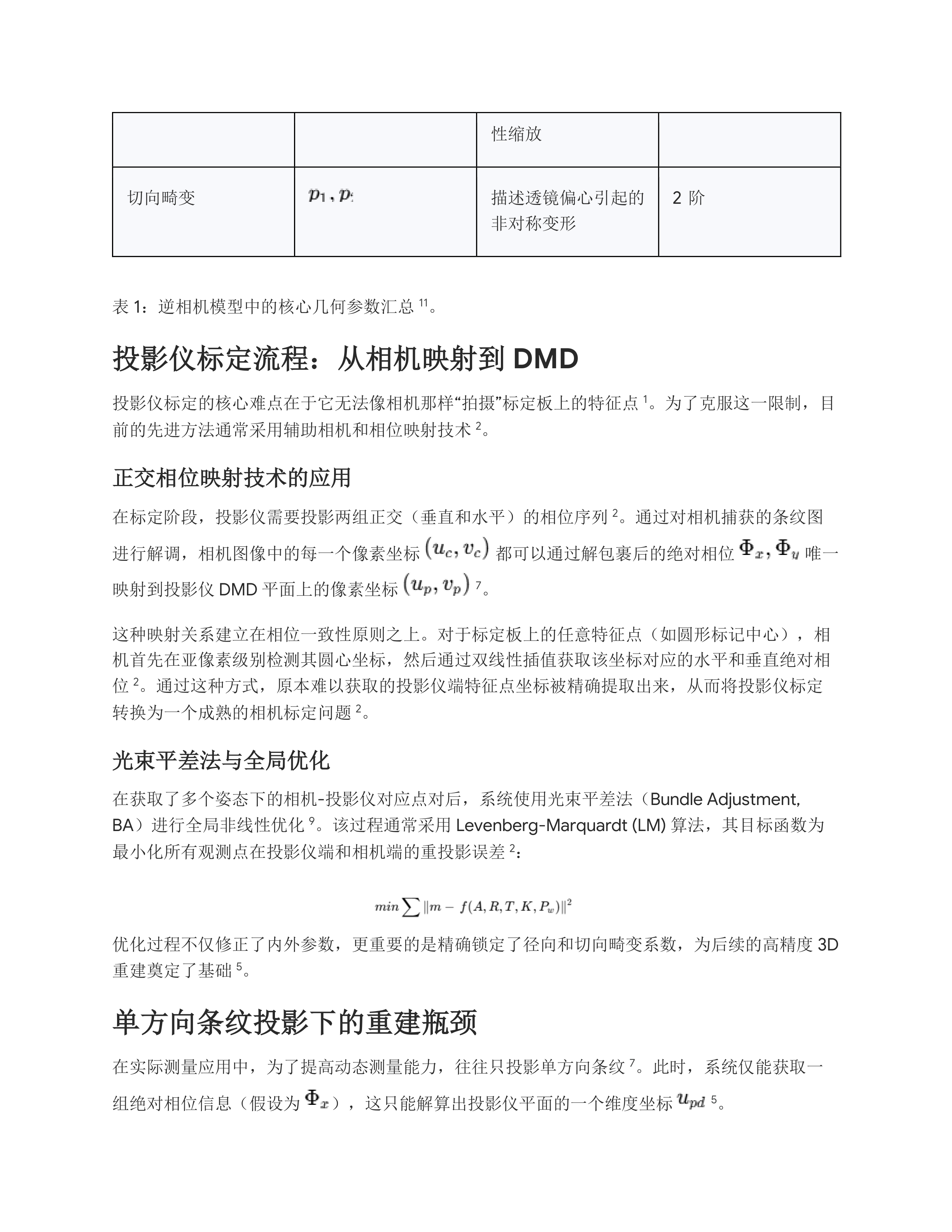
(1) 调研基于逆相机模型(Inverse Camera Model)的投影仪标定原理,重点了解畸变参数(如径向畸变、切向畸变)如何整合进投影仪的内参和外参模型中。
(2) 研究单方向条纹投影(如仅投影垂直或水平条纹)时,绝对相位值与投影仪坐标系(u_p 或 v_p)之间的数学对应关系。
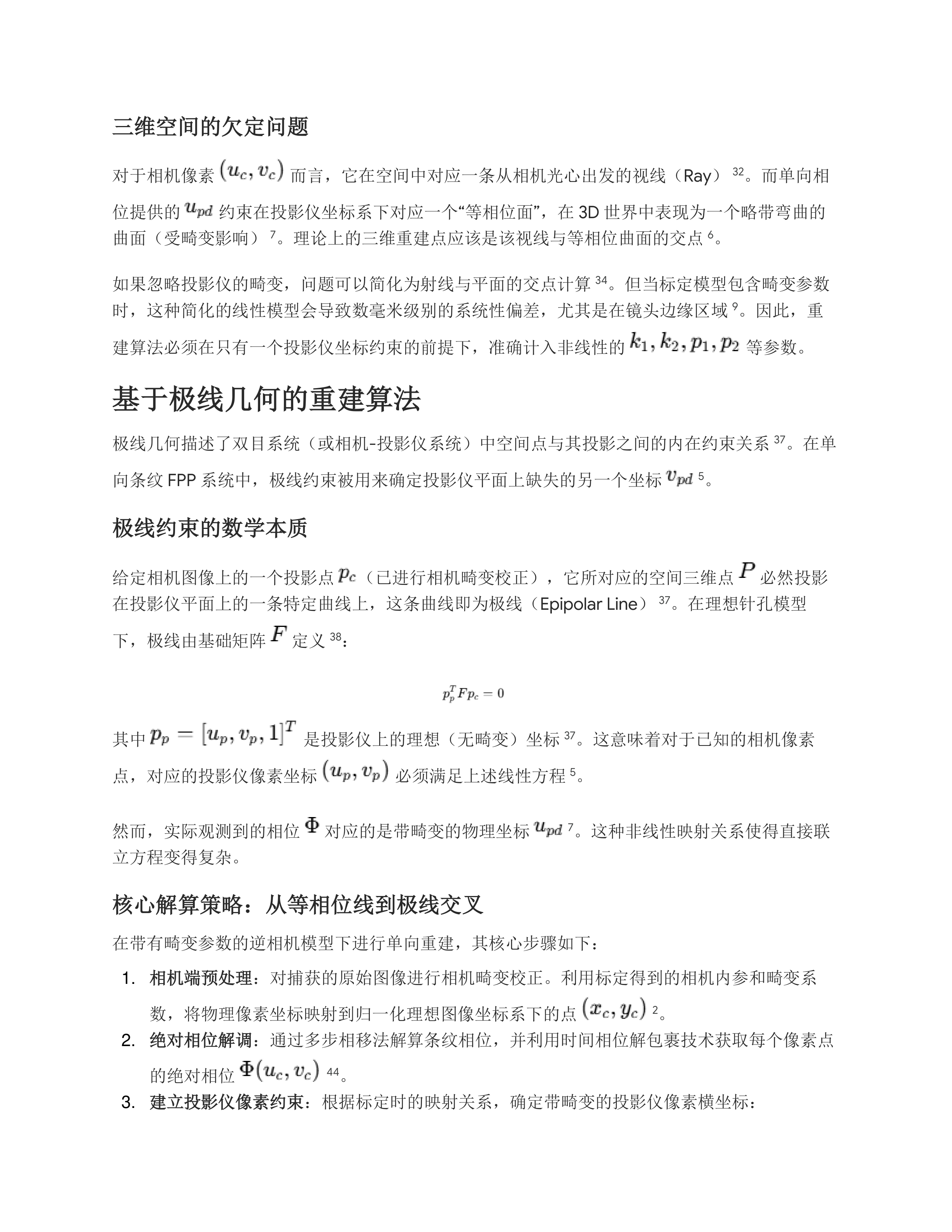
(3) 探索利用极线约束(Epipolar Geometry)解决单方向条纹匹配歧义的机制,分析如何通过相机像素点在投影仪平面上对应的极线与相位等值线的交点来确定匹配坐标。
(4) 梳理3D重建的详细步骤:
(a) 获取相机拍摄到的受调制条纹图并进行相位解包裹,得到绝对相位图。
(b) 利用相机标定参数对相机图像像素进行畸变校正,并计算其在相机坐标系下的物理射线方向。
© 结合投影仪的逆相机模型,根据绝对相位和极线约束方程,计算投影仪坐标系中对应的亚像素坐标。
(d) 考虑投影仪畸变参数,通过迭代法或查找表法修正投影仪坐标,以匹配真实的物理投影路径。
(5) 研究如何建立并求解相机光线与投影仪光线的三角测量(Triangulation)方程组,从而获取空间点的三维坐标(X, Y, Z)。
(6) 分析在存在标定畸变的情况下,单方向条纹重建精度受哪些因素影响,例如极线与条纹方向的夹角、相位误差等。
(7) 查找相关的学术文献或技术方案,总结针对“带畸变逆相机模型+单向条纹”这一特定组合的成熟算法流程或优化计算方法。
分析结果
生成报告
研究报告



小龙虾开发者社区是 CSDN 旗下专注 OpenClaw 生态的官方阵地,聚焦技能开发、插件实践与部署教程,为开发者提供可直接落地的方案、工具与交流平台,助力高效构建与落地 AI 应用
更多推荐

 6
6 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)