
OpenClaw机器人诞生了,首次拥有记忆,科幻电影照进现实了!
OpenClaw机器人诞生了,首次拥有记忆,科幻电影照进现实了!
还没有一台OpenClaw云服务器?点此即可享一键秒级部署。
手把手教你一键部署OpenClaw,1分钟搞定!
可视化面板快速接入QQ、企微、飞书、钉钉等IM应用,同时支持海外Discord、WhatsApp、Telegram、iMessage等应用。
OpenClaw这回彻底把“天网”概念带火了,机器人第一次有了属于自己的“世界记忆”,代码还在GitHub上直接开源!
就在刚才,一条推文(X)直接让机器人圈子炸锅了:一台宇树的人形机器人,装上了OpenClaw系统后,居然搞懂了什么是时间和空间!这可是机器人头一回拥有了所谓的“世界记忆”,它能记得住谁来过、东西放哪了、发生过啥事——这难道就是传说中的“天网”雏形?
真的就是分分钟前的事儿,整个开源机器人的圈子,因为那个帖子彻底沸腾了!
还没有一台OpenClaw云服务器?点此即可享一键秒级部署。
手把手教你一键部署OpenClaw,1分钟搞定!
可视化面板快速接入QQ、企微、飞书、钉钉等IM应用,同时支持海外Discord、WhatsApp、Telegram、iMessage等应用。
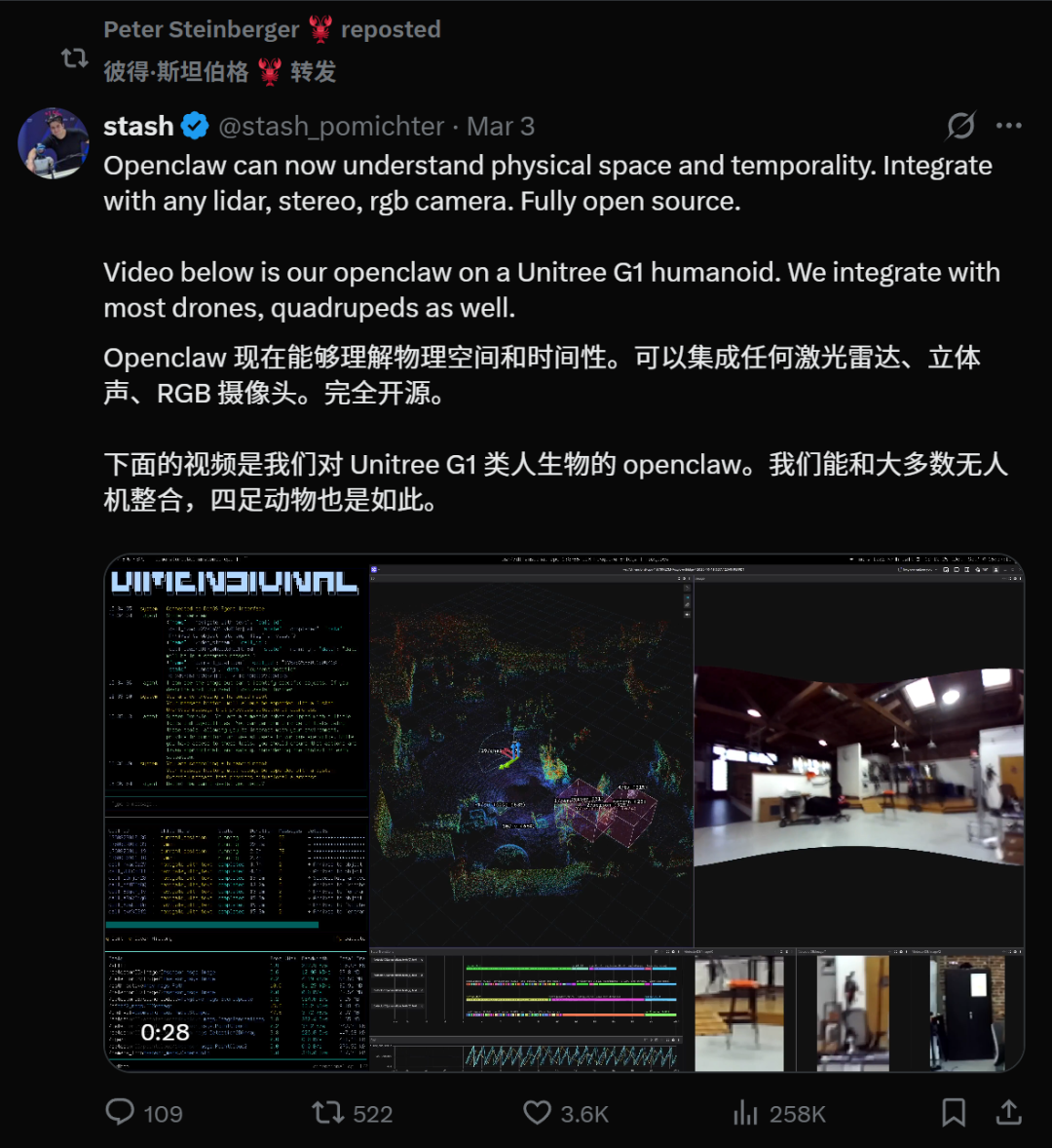
视频里,那个宇树人形机器人在屋里溜达,身上挂着OpenClaw系统。它的“眼睛”配置很豪华:激光雷达(LiDAR)、双目摄像头再加上RGB相机,这一堆传感器搜集到的数据,全都被喂进了一个特殊的处理系统里。
紧接着,以前机器人根本做梦都想不到的事情发生了——这家伙居然开窍了,开始理解时空概念!
它现在心里门儿清:不仅知道房间布局、人和东西具体在哪儿,甚至连什么时间点发生了什么事都记得一清二楚。
还没有一台OpenClaw云服务器?点此即可享一键秒级部署。
手把手教你一键部署OpenClaw,1分钟搞定!
可视化面板快速接入QQ、企微、飞书、钉钉等IM应用,同时支持海外Discord、WhatsApp、Telegram、iMessage等应用。
开发团队给这本事起了个名,叫“Spatial Agent Memory”(空间智能体记忆)。说白了,从今往后,机器人脑子里真有“世界记忆”了!
而把这种逆天能力赋予机器人的,正是那个现在红得发紫的OpenClaw项目。
这成果刚放出来,OpenClaw的亲爹——Peter Steinberger立马就转发了。
这不仅仅是个更新,更是具身智能的大跨越:OpenClaw算是正式拿下了物理空间和时间感知这两座大山。
还没有一台OpenClaw云服务器?点此即可享一键秒级部署。
手把手教你一键部署OpenClaw,1分钟搞定!
可视化面板快速接入QQ、企微、飞书、钉钉等IM应用,同时支持海外Discord、WhatsApp、Telegram、iMessage等应用。
咱们这是把“天网”给开源了?
项目刚一上线,底下的评论区瞬间就炸开了锅。
网友们立马站成了两队。一队人激动得不行,觉得开源机器人终于有了时空感知,这对于边缘AI来说绝对是史诗级的进步!

说实话,搞具身智能的做梦都想要这种突破,现在终于见着活的了!
还没有一台OpenClaw云服务器?点此即可享一键秒级部署。
手把手教你一键部署OpenClaw,1分钟搞定!
可视化面板快速接入QQ、企微、飞书、钉钉等IM应用,同时支持海外Discord、WhatsApp、Telegram、iMessage等应用。
但另一队人就开始冒冷汗了:要是连个普通机器人都能感知空间,这不就等于“天网”已经在GitHub上开了个代码仓库吗?

想象一下,如果机器人能把全家人的生活习惯扒得底裤都不剩——知道谁老往厨房跑,知道垃圾桶啥时候满。这种上帝视角的监控能力,要是没有伦理道德拴着,想想都让人后背发凉!
甚至还有人调侃说,这架势,离接军方的单子也不远了吧。

不过,最让人肾上腺素飙升的是:这玩意儿它是全开源的!
别看视频里演示用的是宇树的机器人,但这套系统其实根本不挑食,跟硬件没绑定死。
还没有一台OpenClaw云服务器?点此即可享一键秒级部署。
手把手教你一键部署OpenClaw,1分钟搞定!
可视化面板快速接入QQ、企微、飞书、钉钉等IM应用,同时支持海外Discord、WhatsApp、Telegram、iMessage等应用。
你手头不管是有激光雷达、立体摄像头还是普通的RGB摄像头,随便拿来就能用。
也不光是像Unitree G1这种人形机器人能用,哪怕是无人机、或者四条腿的机器狗,大部分也都能装。
甚至理论上讲,你拿个带雷达的旧iPhone,都能给机器人做个改造手术。

总之一句话,只要硬件能跑得动OpenClaw,立马就能拥有感知时空的超能力。
而且它还不像传统那样依赖ROS(机器人操作系统),什么动态避障、SLAM(即时定位建图),统统不在话下。
开源机器人,正一步步逼近“天网”时刻
还没有一台OpenClaw云服务器?点此即可享一键秒级部署。
手把手教你一键部署OpenClaw,1分钟搞定!
可视化面板快速接入QQ、企微、飞书、钉钉等IM应用,同时支持海外Discord、WhatsApp、Telegram、iMessage等应用。
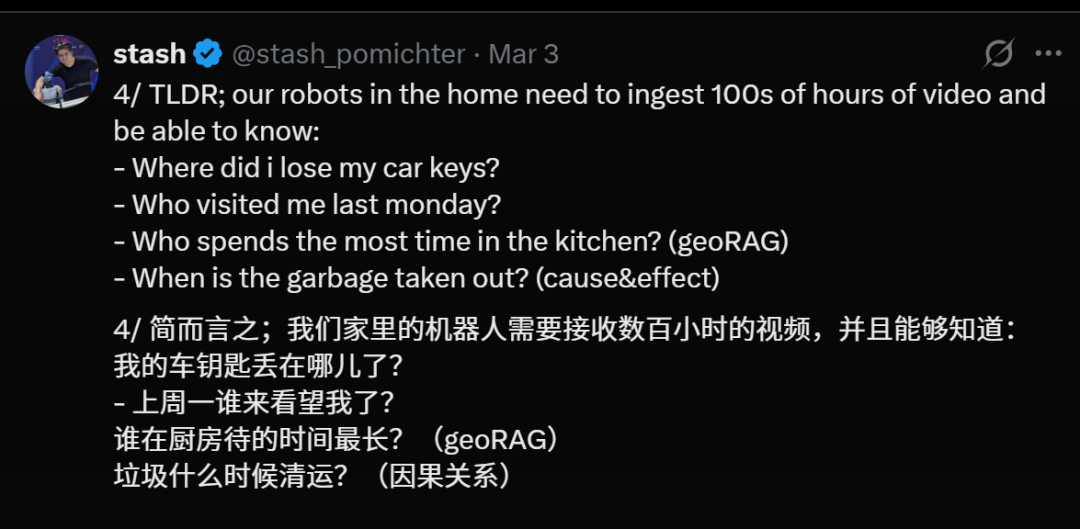
设想一下,哪天你家机器人突然冷不丁来一句:“嘿,你车钥匙昨晚忘在厨房桌上了。”这时候你可能只会感叹一句:哇,真智能。
但要是它接着唠:“上周一晚上8点,有个生面孔来过咱家。”或者“我看你平均每天得在厨房耗47分钟。”这时候,你是不是就觉得头皮发麻了?
那一刻你会突然醒悟:这家伙一直在暗中观察你,甚至把你的一切细节都刻在脑子里了!
最吓人的是,这可不是简单的“行车记录仪”回放,而是一种全新的本事:把空间、时间、语义全部串联起来的联合记忆。
机器人不再是傻乎乎地录像,它是在自己脑子里搭建一个真实的世界模型!
为啥以前的机器人看着那么笨?
回过头来看,为什么之前的那些机器人总让人觉得智商欠费呢?
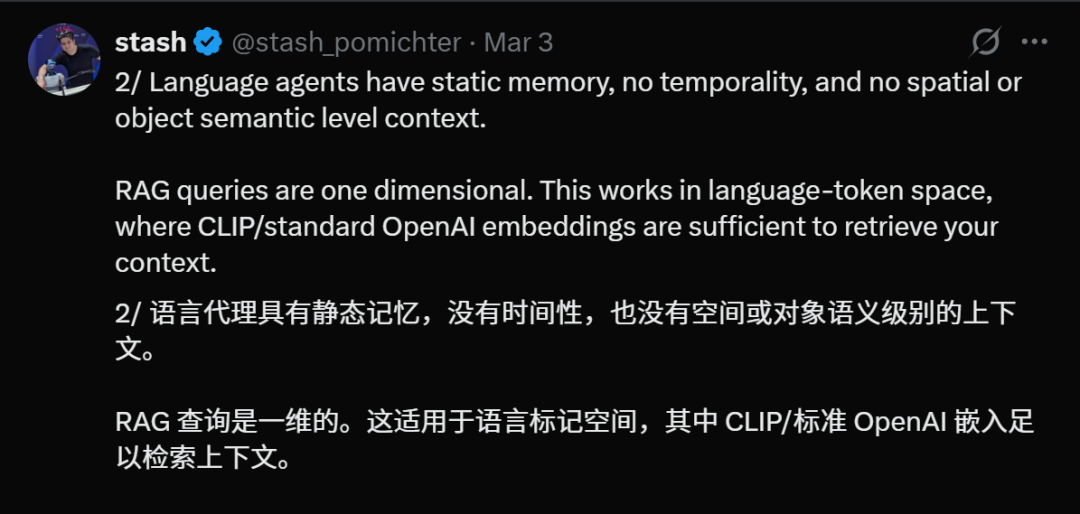
根本原因在于,大模型(LLM)以前只有死记硬背的“静态记忆”,它背得下训练数据,却记不住你五分钟前随手把钥匙扔哪儿了。
其次就是缺个“空间感”。它们在聊天框里可能像个哲学家,但到了现实物理世界,连“厨房在客厅左手边”这种简单的方位都搞不明白。
还有个问题,传统的RAG(检索增强生成)只会搜文字,可机器人每天面对的是什么?是海量的视频流和复杂的深度数据啊。
还没有一台OpenClaw云服务器?点此即可享一键秒级部署。
手把手教你一键部署OpenClaw,1分钟搞定!
可视化面板快速接入QQ、企微、飞书、钉钉等IM应用,同时支持海外Discord、WhatsApp、Telegram、iMessage等应用。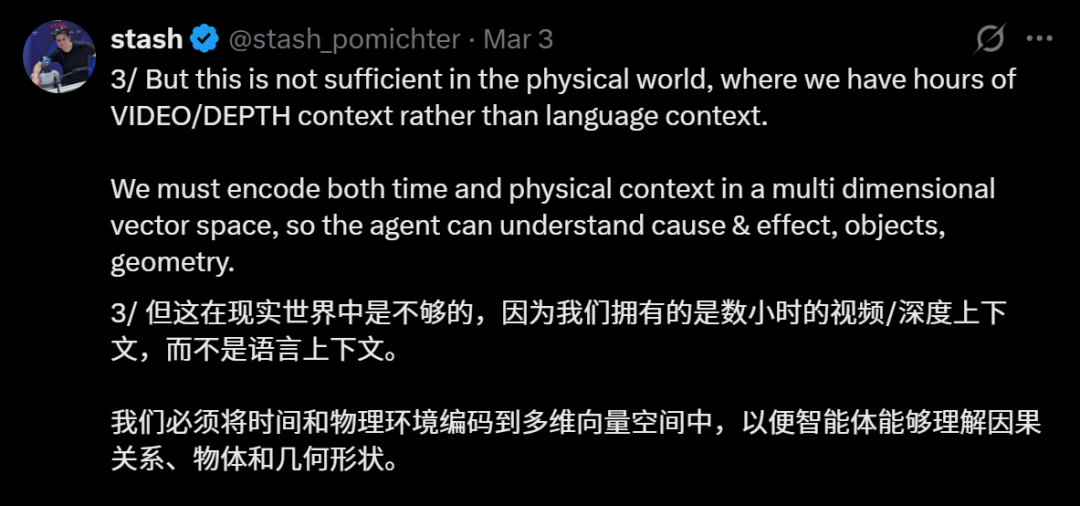
几百个小时的视频、深度图、三维坐标、物体位置变动,这简直就是现实世界的数据洪水,直接冲向机器人。
就在这节骨眼上,这个团队干了一件特别疯狂的事儿。
SpatialRAG黑科技登场,给机器人安了个3D大脑
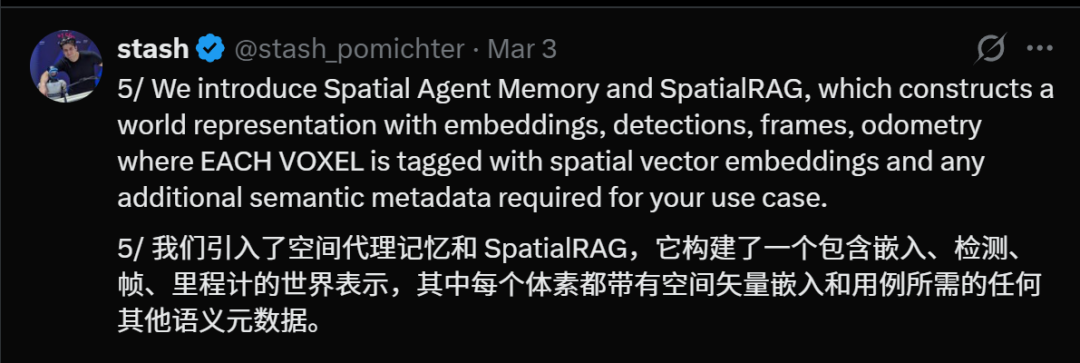
他们直接亮出了底牌——一套叫Spatial Agent Memory(空间智能体记忆)和SpatialRAG的组合拳。
还没有一台OpenClaw云服务器?点此即可享一键秒级部署。
手把手教你一键部署OpenClaw,1分钟搞定!
可视化面板快速接入QQ、企微、飞书、钉钉等IM应用,同时支持海外Discord、WhatsApp、Telegram、iMessage等应用。
这套系统的核心逻辑那是相当硬核:它能把视频流、雷达扫描、单帧图像、甚至里程计数据全部一锅烩,捏成一个由“体素(Voxel)”组成的数字化世界。
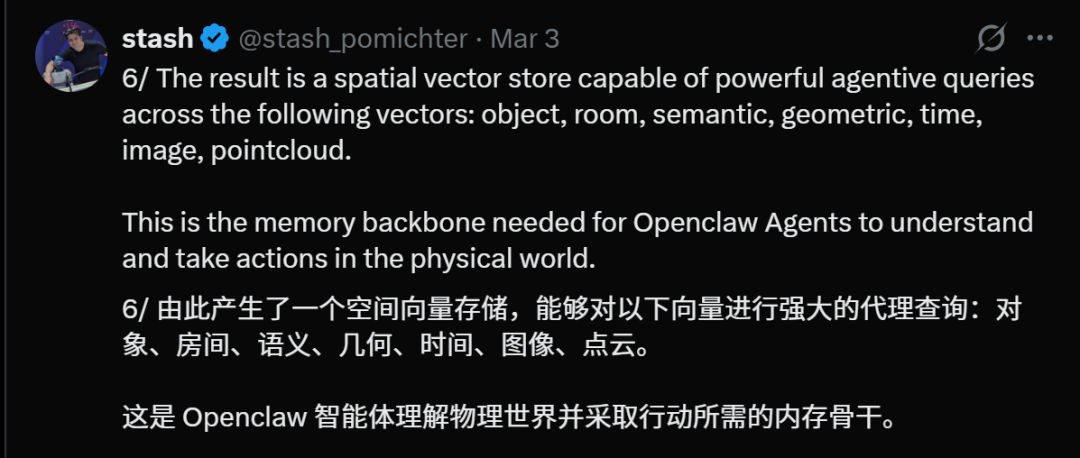
这里面的每一个微小的空间方块(体素),都被打上了空间矢量和语义标签。这么一来,机器人的脑子就进化成了一个超级数据库,里面存着对象、房间、几何结构、时间戳、图像和点云等多维信息。
毫不夸张地说,这就是机器人想要理解物理世界,必须具备的“记忆骨架”。
有了这个系统撑腰,机器人就能在object(物体)、room(房间)、semantic(语义)、geometry(几何)、time(时间)、image(图像)、pointcloud(点云)这些维度里随意搜索。这也是头一回,机器人有了完整版的空间记忆。
所以,现在的它终于能回答那些让你怀疑人生的灵魂拷问了。
比如:“哎,我钥匙跑哪去了?”“上周一到底谁来过我家?”“谁在厨房赖的时间最久?”“这垃圾桶到底该几点倒?”
网友开喷:是天网降临,还是老头散步?
成果一发出来,评论区立马就炸了窝。
吐槽党开始发力:这延迟还不得卡成PPT?你是打算派个百岁大爷来帮我干家务吗?
结果技术团队反手就是一个打脸:“想多了!这玩意儿不跑20Hz实时控制,它是个高层的大脑指挥官。它只负责发号施令,动作执行是异步的,丝滑得很,根本不卡!”
还没有一台OpenClaw云服务器?点此即可享一键秒级部署。
手把手教你一键部署OpenClaw,1分钟搞定!
可视化面板快速接入QQ、企微、飞书、钉钉等IM应用,同时支持海外Discord、WhatsApp、Telegram、iMessage等应用。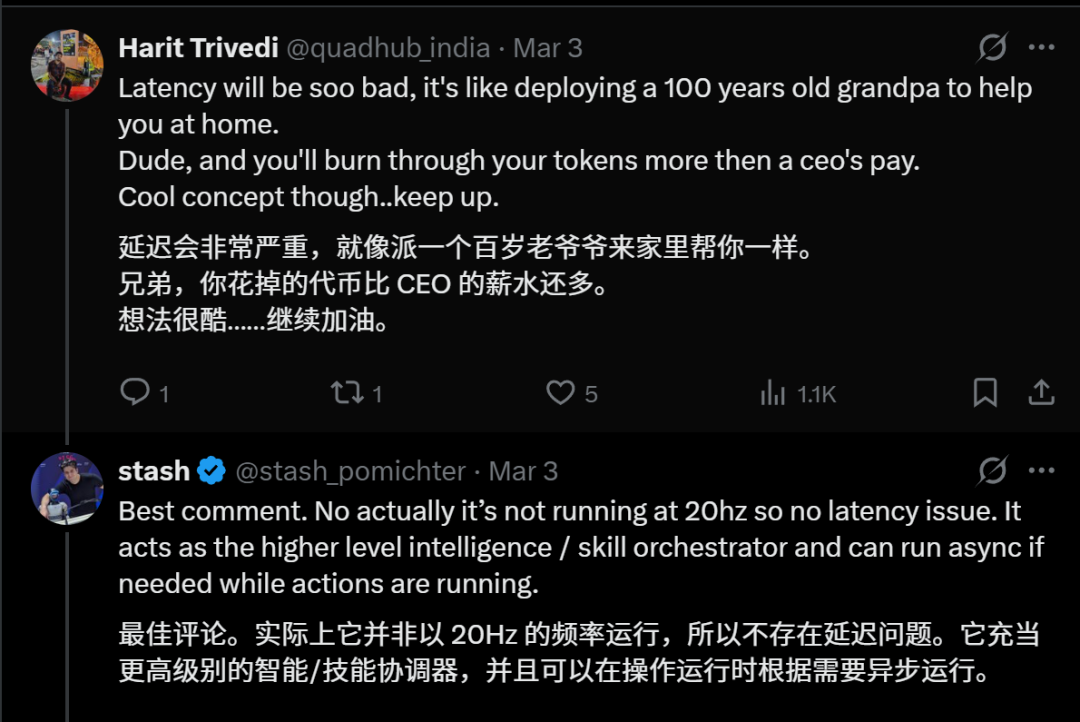
还没有一台OpenClaw云服务器?点此即可享一键秒级部署。
手把手教你一键部署OpenClaw,1分钟搞定!
可视化面板快速接入QQ、企微、飞书、钉钉等IM应用,同时支持海外Discord、WhatsApp、Telegram、iMessage等应用。
还有人提出质疑:放着专用的机器学习模型不用,非得搞LLM加Cron定时任务这种看似复杂又笨重的“鲁布·戈德堡机械”是图啥?
对此,开发者倒也实在,直接摊牌了:“把大模型塞进硬件里确实简单,但难的是让它能一直记着——啥时候、啥地点、发生了啥事,这种持续的物理上下文才是最要命的。”
而OpenClaw给出的不光是一个简单的接口,它直接端上来一整套代理基础设施(Agent Infrastructure):什么子代理怎么排兵布阵、MCP协议怎么处理、工具安不安全、插件怎么用,全包了。
这就让它比那些原生的Claude代码,更配得上做机器人的“前额叶皮层”。
另外,评论区里有个机器人工程师说了句大实话:最难的根本不是什么空间理解,而是怎么让这系统在现实世界里别掉链子。
毕竟现实世界里全是坑:传感器打架、光线忽明忽暗、障碍物乱跑、数据全是噪点,还有硬件故障。这些破事儿,你在仿真模拟器里根本遇不到。
还没有一台OpenClaw云服务器?点此即可享一键秒级部署。
手把手教你一键部署OpenClaw,1分钟搞定!
可视化面板快速接入QQ、企微、飞书、钉钉等IM应用,同时支持海外Discord、WhatsApp、Telegram、iMessage等应用。
具身智能,就差这最后临门一脚
很多人都觉得,“具身”才是产生意识的关键。这次的尝试给咱们上了一课:把大模型搬到硬件上其实不难,难的是让它能产生那种持久的、能跨越时空的物理环境感知。
一旦机器人搞懂了因果关系,记住了位置信息,它就不再是个只会走路的智能音箱,而是进化成了一个真正的“物理代理人”。
也许,“天网”不会一夜之间从天而降,但剧本可能是这样写的:机器人先学会看这个世界,再学会记住这个世界,最后……学会改变这个世界。
当这些逆天能力全部开源之后,意味着谁都能亲手搓出一个机器人大脑来。

等哪天咱们再回头看今天,没准会发现:这里才是机器人时代真正的起点。
家用机器人的大门,可能真就要被这只“开源的爪子”给一把挠开了。
还没有一台OpenClaw云服务器?点此即可享一键秒级部署。
手把手教你一键部署OpenClaw,1分钟搞定!
可视化面板快速接入QQ、企微、飞书、钉钉等IM应用,同时支持海外Discord、WhatsApp、Telegram、iMessage等应用。

小龙虾开发者社区是 CSDN 旗下专注 OpenClaw 生态的官方阵地,聚焦技能开发、插件实践与部署教程,为开发者提供可直接落地的方案、工具与交流平台,助力高效构建与落地 AI 应用
更多推荐
 11
11 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)