
一文读懂PPO算法
在深入PPO之前,我们必须先理解强化学习 (Reinforcement Learning, RL) 的基本框架。想象一个智能体 (Agent)(比如一个游戏角色或机器人)在一个环境 (Environment)中(比如一个游戏关卡或现实世界)。状态 (State):智能体首先观察环境,获得一个状态 (State)或观察 (Observation)。动作 (Action):基于这个状态,智能体从它所有
从策略梯度到近端策略优化
在强化学习领域,PPO (Proximal Policy Optimization) 算法无疑是很优秀的。它以其出色的稳定性、易于实现和卓越的性能,成为了许多研究和应用的首选算法。
但PPO并非横空出世,它是站在巨人肩膀上的产物。要真正理解PPO为什么这么有效,我们必须沿着它的进化路径,从最基础的策略梯度 (Policy Gradient) 讲起,途经 Actor-Critic、TRPO,最终才能领会PPO设计的精妙之处。
一、 什么是强化学习?(基础知识)
在深入PPO之前,我们必须先理解强化学习 (Reinforcement Learning, RL) 的基本框架。
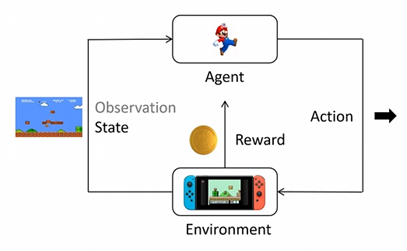
想象一个智能体 (Agent)(比如一个游戏角色或机器人)在一个环境 (Environment) 中(比如一个游戏关卡或现实世界)。这个过程是这样循环的:
-
状态 (State):智能体首先观察环境,获得一个状态 (State) 或观察 (Observation)。
-
动作 (Action):基于这个状态,智能体从它所有可能的“动作空间” (Action Space) 中(例如“向左”、“向右”、“跳跃”),选择一个动作 (Action) 来执行。
-
奖励 (Reward):环境接收到这个动作后,会给智能体一个奖励 (Reward)(可能是正分,也可能是负分),并进入下一个状态。
智能体做决策的“大脑”被称为策略 (Policy),通常用 表示。策略是一个函数,它输入当前的状态,然后输出一个概率分布,决定采取每个动作的可能性。例如,π(向左|
)=0.1, π(向右|
)=0.7。
智能体与环境互动的一整串序列 {,
,
,
,...} 被称为一条轨迹 (Trajectory)。从某个时间点到游戏结束的所有奖励总和,被称为回报 (Return)。
强化学习的最终目标就是:训练这个策略网络 ,使其在所有可能的轨迹中,获得的期望回报最大化 。
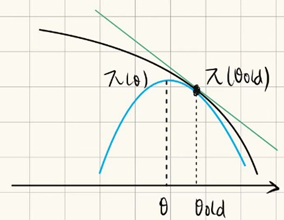
这个智能体一般是一个深度神经网络
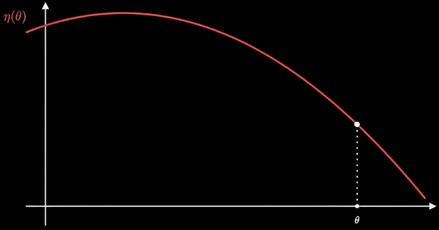
将这个神经网络的所有权重拿出来可以拍成一个高维向量
,如果将其放在一个数轴上,就是一个点,对此时的网络性能打分就是
,让它动起来就形成了目标函数曲线。训练的目的就是找到顶点,也就是最优参数
。
这个目标函数曲线写成迭代式子为:
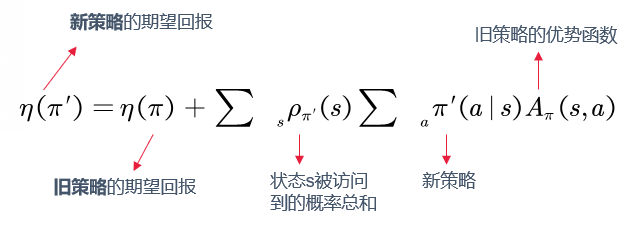
这个公式的核心就是: 新策略的回报 = 旧策略的回报 + “在新策略的状态分布下,执行新策略动作所能带来的(相对于旧策略的)优势总和”
二、 策略梯度 (PG):让回报“飞一会儿”
当前对下一步新策略和状态分布
都不可知,就好像一个人孤零零的站在一根柱子上,不知道哪边是上山,哪边是下山。
怎么走才能快速达到山顶?也就是如何快速到达最大值。
常见的方法就是沿切线向上。
策略梯度 (Policy Gradient, PG) 是最直接的想法。想象一个目标函数 ,它代表了策略
的期望回报。我们如何最大化它?
答案是:梯度上升。就像爬山一样,我们只需要沿着梯度的方向(最陡峭的方向)更新策略参数 即可 。
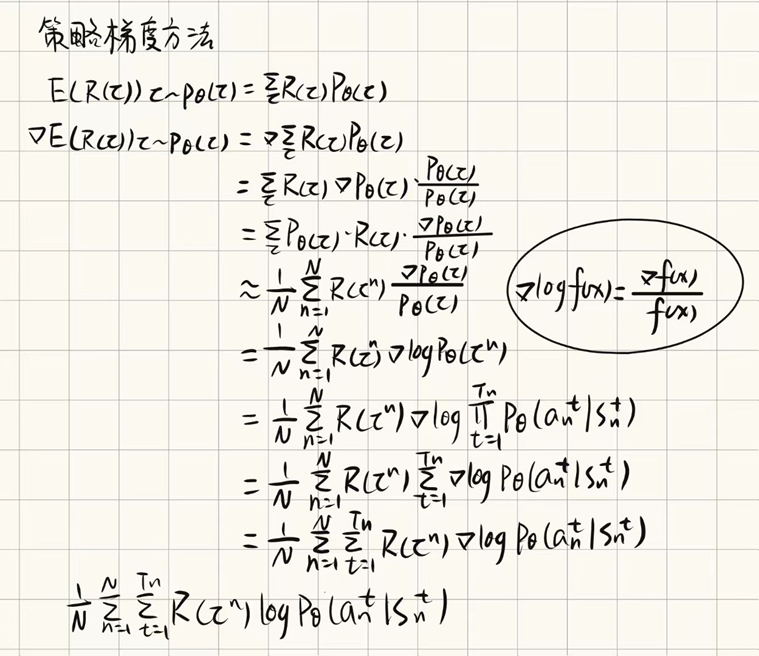
通过一系列推导,我们得到了PG的梯度估计器 :
这里的 一开始是指
时刻之后的总回报
。这个公式的直观理解是:
-
如果在
之后获得了高回报(
为正且大),我们就增大
,即增加在
状态下执行
动作的概率。
-
反之,如果回报低,就降低这个概率。
所以这样就完成了对“在新策略的状态分布下,执行新策略动作所能带来的(相对于旧策略的)优势总和”的估计。
但这有个大问题:方差太高 。 是一个随机采样值,波动极大,导致训练过程非常不稳定。
三、 升级:从PG到Actor-Critic (A2C) 和 GAE
为了解决高方差问题,研究者们引入了两个关键技术:Actor-Critic 和 GAE。
1. Actor-Critic (A2C)
对上述公式继续推导:
第一个推导 (Line 1 -> Line 2):使用“未来回报”
Line 1:
Line 2:
1. 符号解释:
-
:这是第 n 条完整轨迹 (Trajectory) 的总回报 (Total Return)。
(即从头到尾所有奖励的总和)。
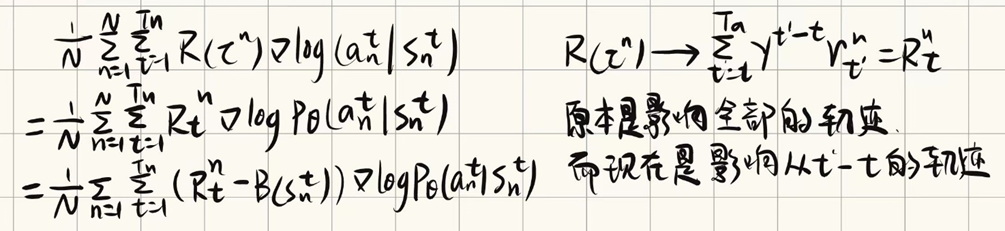
-
:这是从 t 时刻开始的未来回报 (Future Return),也叫 "Return-to-Go"。
(即从 t 时刻到回合结束的奖励总和)。
2. 为什么可以这么做:
强化学习中有一个基本原则:“在 t 时刻做出的动作 a_t,只会影响 t 时刻及之后获得的奖励,无法影响 t 时刻之前已经获得的奖励。”
-
Line 1 的问题: 它使用总回报
-
过去的奖励:
-
未来的奖励:
(这正是
-
-
用一个包含了“过去奖励”的值来评估“当前动作”的好坏,显然是不合理的。这个“过去的奖励”就像一个“噪音”,它与
的好坏无关,但会使
-
Line 2 的改进: 我们只使用未来回报
第二个推导 (Line 2 \rightarrow Line 3):引入“基线”
Line 2:
Line 3:
1. 符号解释:
-
:一个基线 (Baseline) 函数。这是一个只和状态
有关,而和动作
-
最常用的基线就是状态价值函数 (Value Function)
,它表示“在状态
2. 推导的直觉(为什么可以这么做):
-
Line 2 的问题: 假设在一个游戏中,无论你做什么动作,你得到的未来回报
-
如果你做了一个“很差”的动作,得了 100 分 (
-
如果你做了一个“很好”的动作,得了 120 分 (
-
按照 Line 2 的公式,
永远是正的(因为
-
-
Line 3 的改进: 我们引入一个“平均分”基线
)。我们用优势 (Advantage)
来评估动作:
-
“很差”的动作:
= 100 - 110 = -10。梯度项
为负,算法会降低这个动作的概率。
-
“很好”的动作:
为正,算法会增加这个动作的概率。
-
通过减去一个基线,我们将“奖励”从“绝对的好坏”变成了“相对的好坏”(即比平均好还是比平均差),这使得学习信号更清晰,方差更小。
这就是 REINFORCE with Baseline 算法的核心,也是 A2C (Actor-Critic) 算法的基石。
我们训练两个网络 :
-
Actor (演员): 策略网络
,负责做动作。
-
Critic (评论家): 价值网络
,负责评估当前状态
的“平均价值” 。
然后,我们定义优势函数 (Advantage Function) :
它衡量的是:在状态 下,执行动作
相比于“平均水平”
到底有多好。用
替换
可以显著降低方差。
2. GAE (Generalized Advantage Estimation)
那怎么估计 呢?
定义如下函数:其中是衰减系数
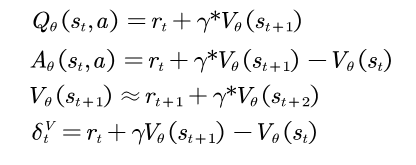
我们又面临一个偏差-方差权衡:
-
1-步TD估计:
。这其实就是 TD 误差
。它偏差高(因为依赖
的估计),但方差低。
-
蒙特卡洛估计:
。它偏差低(全用真实奖励),但方差高。
GAE 的核心思想是不只选择其中一种,而是将所有 n-步 优势估计值 进行一次“加权平均”。
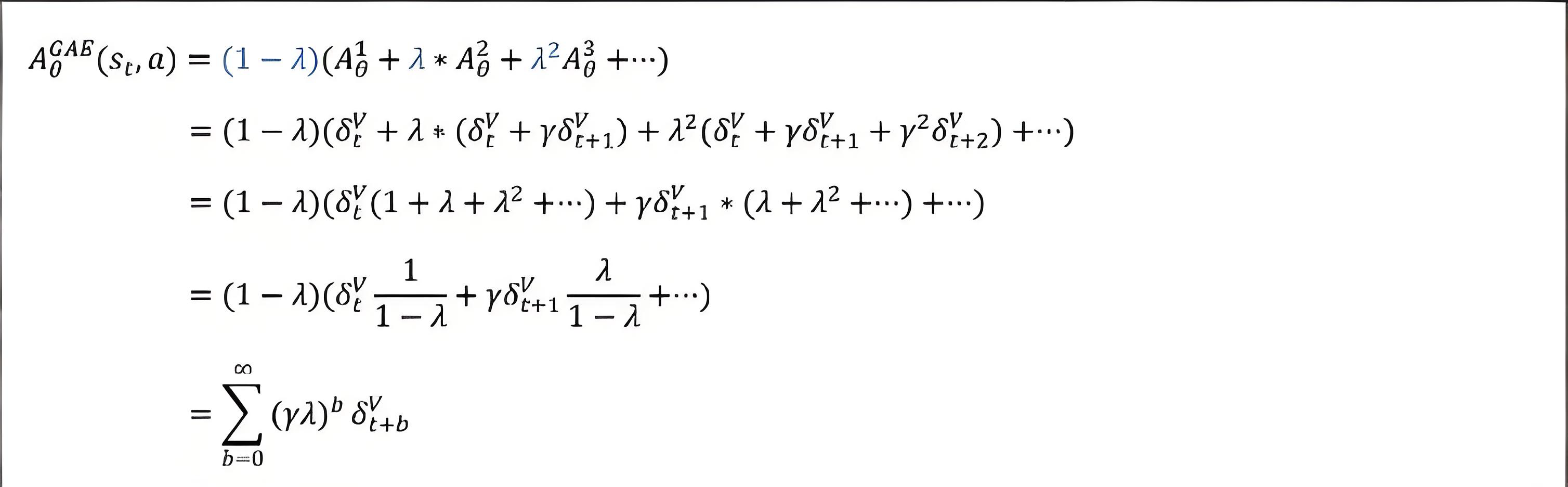
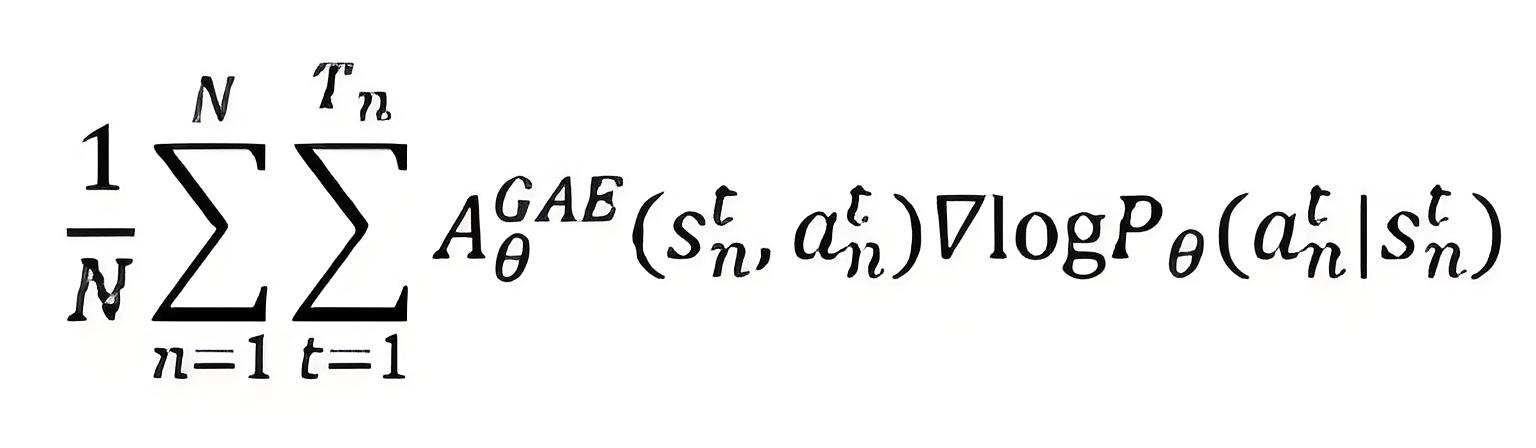
此时,期望回报函数用上述估计变为:
四、 效率革命:从 On-Policy 到 Off-Policy (TRPO)
TRPO (Trust Region Policy Optimization)
策略梯度存在的问题:为了安全起见,每次向上只走α一小步,移动速度会很慢
TRPO创造性的提出的一条安全线:
通过寻找新函数的最大值(蓝线顶点),就能更快的更新策略
所用的A2C + GAE 已经很好了,但还有个效率问题:它们是 On-Policy 的。这意味着 Actor 采样回来的数据 (Trajectory) 只能用来更新一次,更新完就必须丢弃,再用新策略去采样。这非常浪费!
重要性采样 (Importance Sampling)
为了重用数据 (Off-Policy),我们引入重要性采样 (Importance Sampling) 。
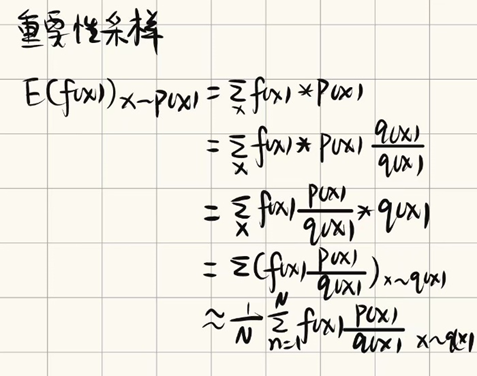
目标分布 p(x): 就是我们想要优化的新策略
采样分布 q(x): 就是我们刚刚用来收集数据的旧策略
我们想用旧策略 采到的数据,来评估新策略
。这需要乘以一个概率比率
:
此时,我们的目标函数变成了:
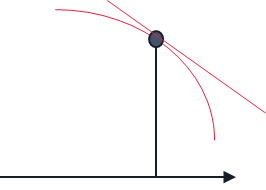
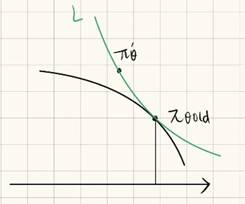
但 可能是个“炸弹”。如果新旧策略差异太大,这个比率会变得非常大或非常小,导致更新极其不稳定。TRPO (Trust Region Policy Optimization)对其进行限制:
这个限制就形成了一个区域,而这个区域就是所说的信赖域(Trust Region),如图:
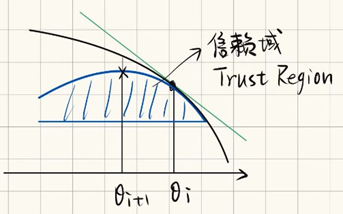
可以理解为在这个区域内是绝对安全的,现在就变成了寻找这个区域的顶点
此时上述所说的都是梯度策略的切线,对
进行重要性采样,
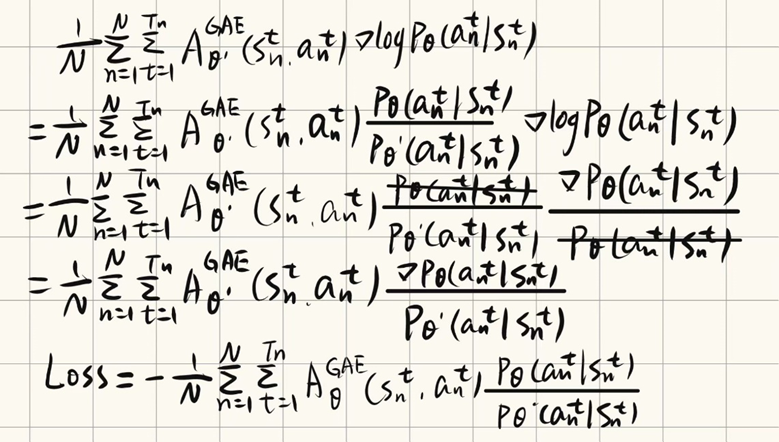
对于此时的可以理解为在当前有策略
,往前瞄准某个新策略
,扔一个钩子进行瞄定,然后在当前点和锚点之间拉一条悬索,此时不再是切线,而是一条微弯的曲线,但起到的作用还是一样的,是为探索所构建的临时性安全保护措施。
简单来说,TRPO算法就重复以下两个步骤(1.近似,2.最大化):
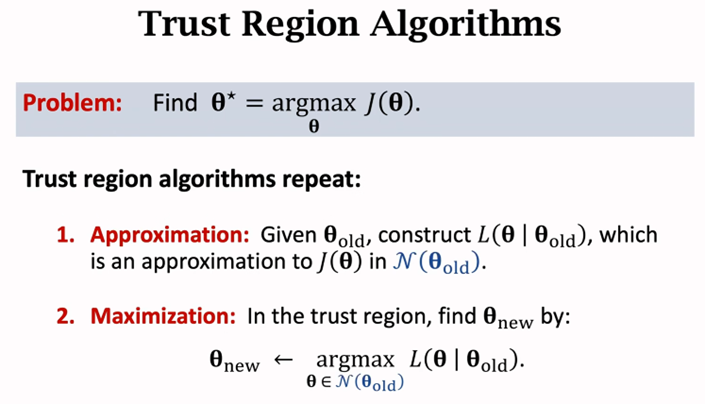
五、 PPO登场:TRPO的“简易版”
TRPO 的效果非常好,但它的 KL 约束是一个带约束的优化问题,在计算上非常复杂,需要用到复杂的二阶优化方法,难以实现 。
PPO (Proximal Policy Optimization) 的目标是:在实现 TRPO 稳定性的同时,只使用简单的一阶梯度方法。
PPO-Clip
PPO 最核心的创新是 PPO-Clip ,它把 TRPO 的“硬约束”巧妙地转化为了一个“软裁剪”的目标函数。
请看这个 PPO 的核心公式:
它是如何工作的?
这里的 是一个超参数(比如0.2)。
函数会把
强行限制在
这个小区间内(例如
)。
我们来分析 函数里的两项:
-
:这是原始的 CPI 目标。
-
:这是“裁剪后”的目标。
PPO 通过取这两项的最小值,达到了 TRPO 的效果:
-
Case 1:
(这是个好动作)
-
此时,我们希望增大
(让
更倾向于做这个动作)。
-
但
的
函数会给
之后,
-
因此,
。
-
结果:目标函数不再增长,梯度消失。这阻止了策略更新幅度过大。
-
-
Case 2:
(这是个坏动作)
-
此时,我们希望减小
-
当
之后,
-
。
-
结果:目标函数不再下降。这阻止了策略更新幅度过大。
-
PPO-Penalty
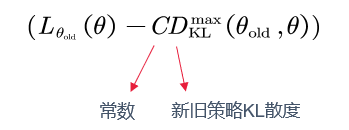
在优化理论层面,也可以将这种约束作为惩罚项。这是 PPO 提出的另一种形式,它不使用“硬截断”,而是使用“KL 散度”作为惩罚项(Penalty)来“软约束”策略的更新。
-
是新旧策略之间的 KL 散度,用于衡量两个策略的“距离”。
-
是一个惩罚系数(超参数),它平衡了“提升回报”和“保持接近”这两个目标。
在PPO论文中,这个 还会根据实际的 KL 散度与目标 KL 散度的差距进行自适应调整(Adaptive KL Penalty)。
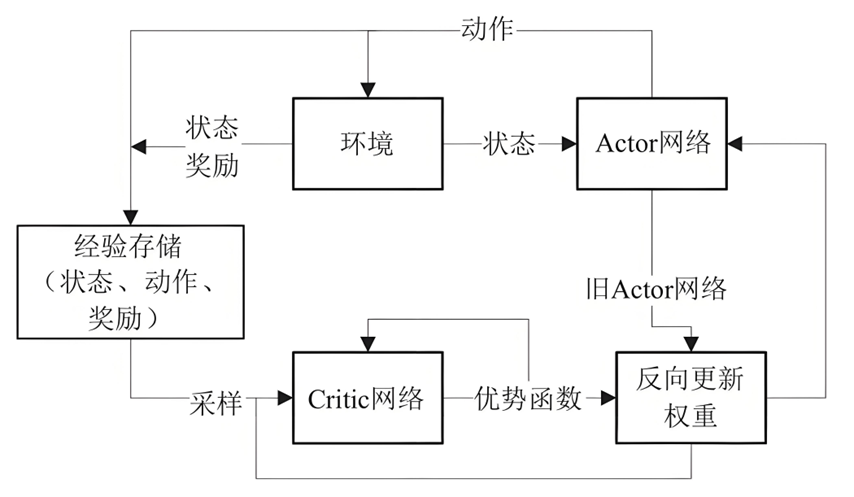
PPO算法流程图:
总结
PPO-Clip 通过一个简单的 min 和 clip 操作,移除了策略过度更新的动机,将策略更新限制在一个隐形的“信赖域”内,同时它又是一个普通的目标函数,可以轻松地用 Adam 等一阶优化器进行优化。PPO 算法的整体流程是:Actor 与环境交互,收集数据 ,然后 Critic 计算优势函数(用GAE),最后 Actor 使用 目标函数进行多次迭代更新。
更多推荐


 19
19 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)