
智能座舱系统架构与关键技术
本文介绍了智能汽车系统的分层架构与核心技术。系统采用Linux+Android双系统设计,硬件层包含DMS摄像头、SOC芯片等组件,软件层基于中间件进行功能开发。人工智能座舱作为独立系统,通过云端数据训练提升感知能力,支持OTA远程升级。关键技术包括高算力芯片、多屏协同、触控优化等,实现从单屏到多屏(仪表盘、中控屏、HUD等)的智能交互。系统采用服务层-软件层-硬件层的三层架构,结合云端数据与本地
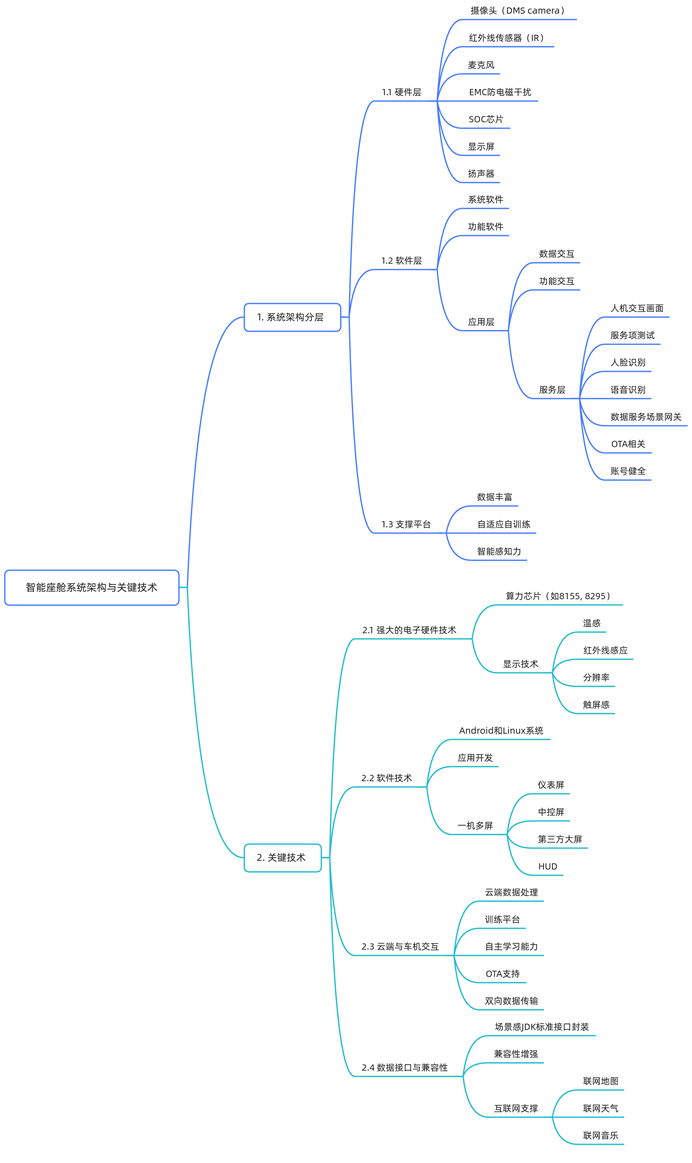
系统架构与应用场景
系统划分
Linux系统用于汽车仪表盘,Android系统用于中控大屏。
应用层功能
包括数据交互、功能交互等场景,体现于上层应用。
示意图说明
展示了从底层硬件到上层服务的完整架构层次。
硬件层组成
摄像头
DMS摄像头用于疲劳驾驶监测,捕捉面部表情。
IR红外传感器
用于人脸识别,结合RGB颜色算法进行表情识别。
麦克风与EMC
支持语音控制,麦克风质量影响识别率;EMC用于防电磁干扰。
存储与SOC芯片
包括运行内存、闪存等;SOC芯片是核心硬件组件。
软件层与服务层
软件层
基于中间层和系统软件进行功能开发,测试关注较少。
服务层
涉及人机交互界面,需测试上层应用是否正常工作,如音乐、设置项等。
硬件匹配测试
包括人脸识别与语音识别联动、数据服务网关、T-Box、OTA数据包等。
支撑平台与人工智能座舱
支撑平台功能
提供数据丰富性与软件自适应训练能力,提升智能感知水平。
人工智能座舱特性
为独立系统,可独立迭代;架构设计模型可参考示意图。
底层支撑与硬件接入
底层构成
包含芯片、DMS摄像头、功放、扬声器、显示屏等硬件。
数据处理流程
DMS摄像头捕捉图像,芯片处理后上传数据。
设备管理与交互
包括设备控制、扬声器管理等。
应用层交互与云端数据
应用场景
包括车身控制、车辆设置、第三方APP交互控制(如CAPAY CarLife、HiCar)。
云端数据关联
云端处理数据,通过训练平台模拟计算生成识别模型。
云端语音优势
支持在线语音识别,具备自主学习能力,可快速更新识别词汇库。
传统语音局限性
本地语音识别占空间、学习能力差、更新困难。
OTA与数据交互
OTA优势
支持远程系统升级,云端可识别车辆状态并下发升级包。
数据双向交互
车机端可唤醒语音助手,从云端获取数据。
单向数据传输
云端向车机端下发数据处理任务。
数据接口设计
如JDK接口封装,提升兼容性与稳定性。
后台数据与网络支撑
云端数据来源
包括后台大数据、互联网系统(移动、电信、联通)。
联网功能实现
支持联网地图、天气获取、在线音乐等功能。
软件架构总结
三层架构模型
分为服务层、系统软件与感知/功能软件层、底层硬件。
与OSI模型关系
紧密结合OSI模型,体现清晰的分层结构。
关键技术分类
电子硬件技术
高算力芯片(如8155、8295)
显示技术(高分辨率、温感、红外感应)
触控体验优化
软件技术
基于Android与Linux系统开发应用
实现车机智能化与多功能扩展
多屏协同技术
从单屏走向一机多屏
通过操作系统实现芯片统一控制多屏
支持仪表屏、中控屏、第三方大屏、HUD等集成
更多推荐


 28
28 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)