电力电子中的坐标变换
目的:将三相交流量转化成了两相直流量,方便我们用比例积分或者其他的控制算法去控制对于三相对称交流电,以三相电压为例进行说明,首先介绍欧拉公式其θ角可以表示某正弦量所处的空间位置,此公式可看做一个单位矢量,主要反映角度关系,某一个矢量和相乘就表示空间位置逆时针旋转了θ角度。
目的:将三相交流量转化成了两相直流量,方便我们用比例积分或者其他的控制算法去控制
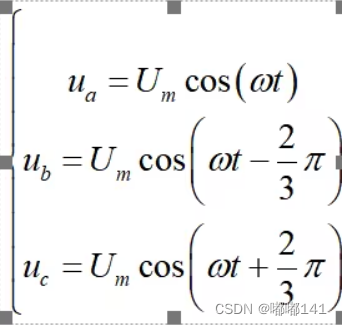
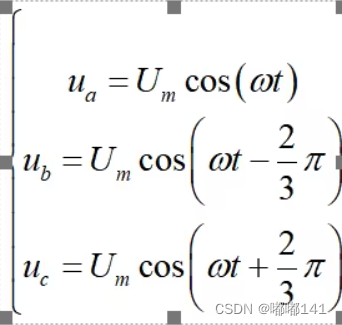
对于三相对称交流电,以三相电压为例进行说明,
首先介绍欧拉公式
![]()
其θ角可以表示某正弦量所处的空间位置,此公式可看做一个单位矢量,主要反映角度关系,某一个矢量和相乘就表示空间位置逆时针旋转了θ角度。
一、3/2变换,即clark变换
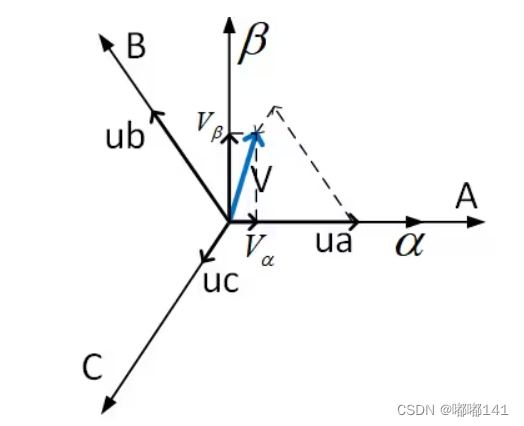
把三相电压表达式放在三相ABC坐标系中,电压每相相差120度,如果把A轴对应的θ角定为0度,则A,B,C三相坐标系上的正弦矢量可分别表示如下,
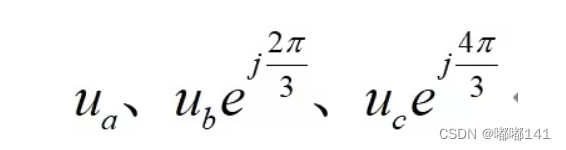
相当于ua在A轴上,ub在B轴上,uc在C轴上。
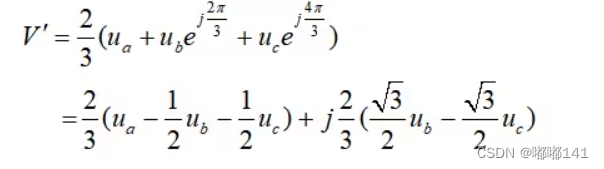
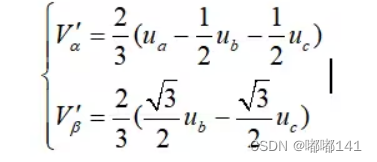
则合成矢量表达式如下:
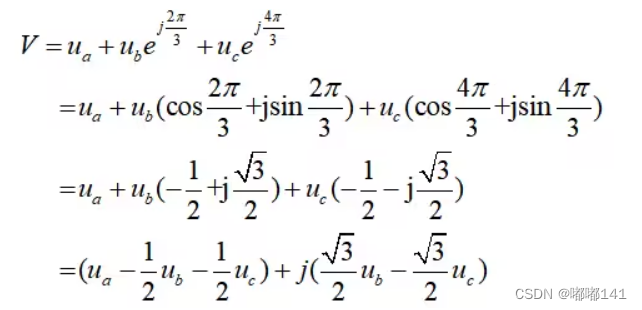
上面最后式子相当于一个在实轴上,一个在虚轴上,虚轴超前于实轴90度。这样原来三个方向上的量就可以用两个方向的量来表示。即从ABC坐标系转换到坐标系。换种方式表达如下:
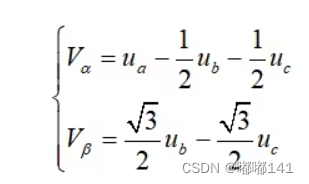
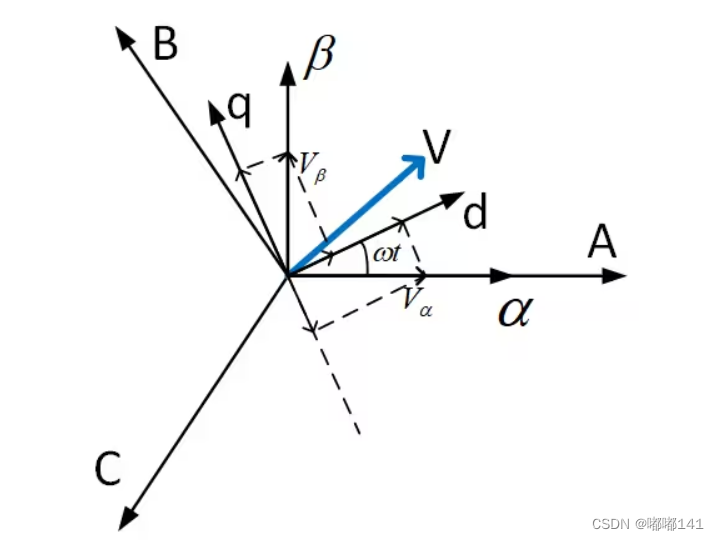
Vα,Vβ即为两相静止坐标系下的分量,对应坐标系如下图所示:
将式1中的三相电压表达式代入上式:
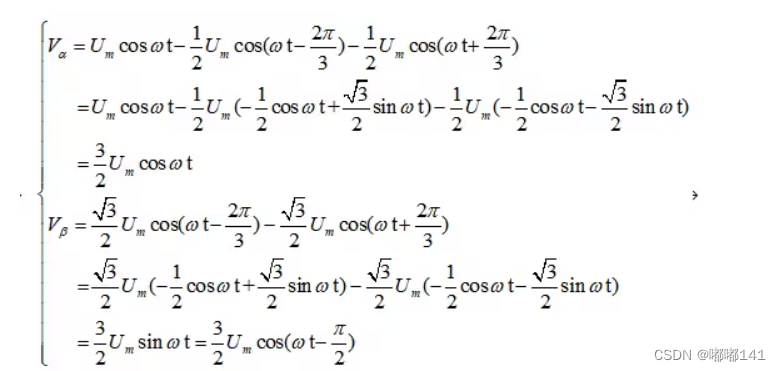
由运算结果可得,Vα超前于Vβ 90度,两者幅值相等。但幅值为原来式1中三相电压的3/2倍。
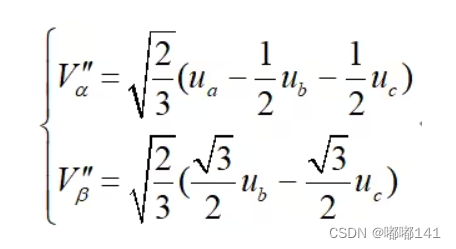
(1)下面采用等幅值变换 ,将原表达式×2/3
此时得到的新的α轴,β轴分量的表达式如下:
这样坐标变换矩阵就如下所示:
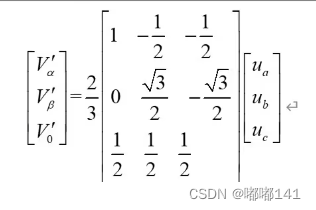
其中最后一行均为1/2,是因为它包含了不对称三相正弦量的情况,此时就会多出来一个零轴分量 因为我们主要研究的是三相对称电路,不必纠结。
再将式(1)的三相电压代入上式:
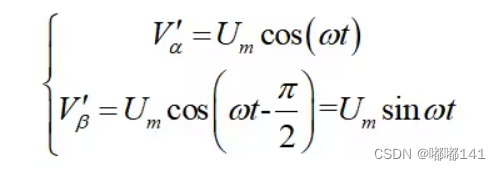
可得经过等幅值变换后的合成矢量的幅值为:
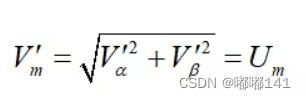
经过等幅值变换后合成矢量的幅值就是原来给定三相电压的幅值,这样变化前后,三相ABC坐标系和两相αβ静止坐标系上的正弦量幅值均相等。
(2)等功率变换
如果设三相电压与电流的夹角为 θ,那么变换到两相坐标系后,电压电流的夹角依然不变。
则三相平均有功功率可表示为:

两相αβ坐标系下对应的有功功率可表示为:

假设原来变换时,乘以个系数k,使得前后功率相等,则相当于变换后电压电流都多了个系数k,
得k=
最终变换为:
二、Park变换
旋转变换,由两相静止坐标系到两相旋转坐标系上的转化,旋转角度与三相正弦量的角度一致。从A轴开始,以wt的角速度旋转,这样合成的电压矢量会和dq0坐标轴同步旋转,旋转矢量和旋转的dq0坐标系处于一个相对静止的状态,所以坐标轴上的分量就是直流量了,这样就把三相交流量转化成了两相直流量,方便我们用算法去控制 。
具体的转换过程如下:
- 根据αβ坐标系下的信号,得到信号与dq坐标系下的信号之间的夹角θ。
- 根据夹角θ,计算出Park变换矩阵的元素值。
- 将αβ坐标系下的信号向量通过Park变换矩阵进行矩阵乘法运算,得到dq坐标系下的直流电压和电流分量。
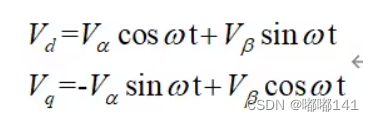
以d轴做主轴的情况为例分析:基于cos的park变换
通过坐标分解,就是将αβ0坐标系上合成的矢量,分别投影到旋转坐标系的d轴和q轴上,可得:
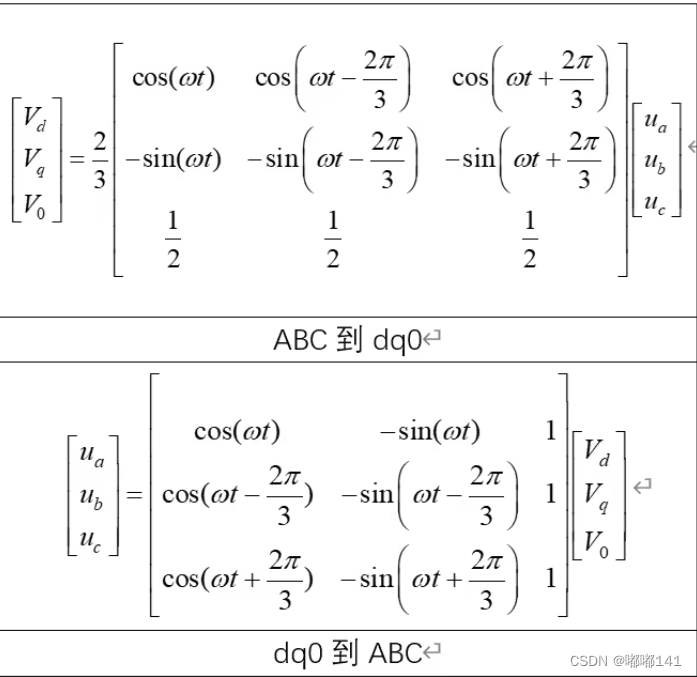
将clark变换的公式代入上式就可以得到ABC到dq0的坐标变换矩阵,以等幅值为例,如下:
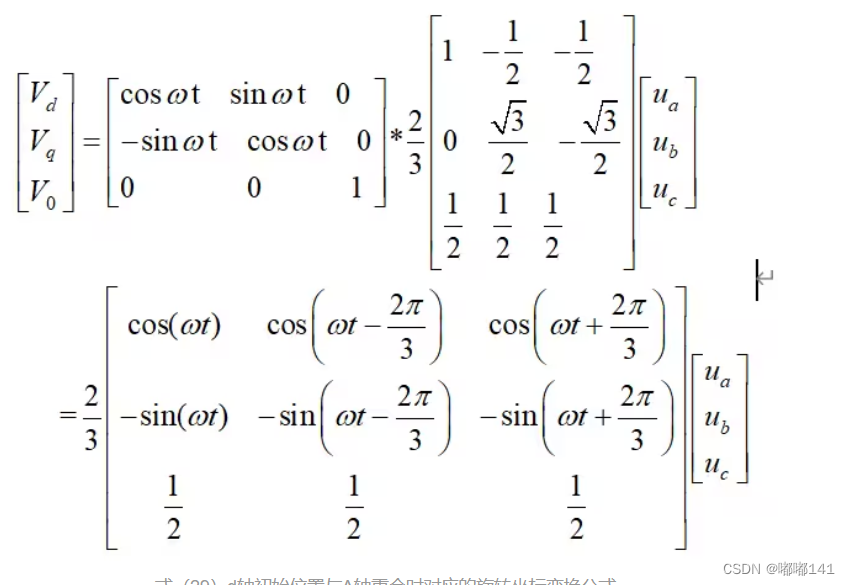
然后将三相cos形式电压表达式代入:
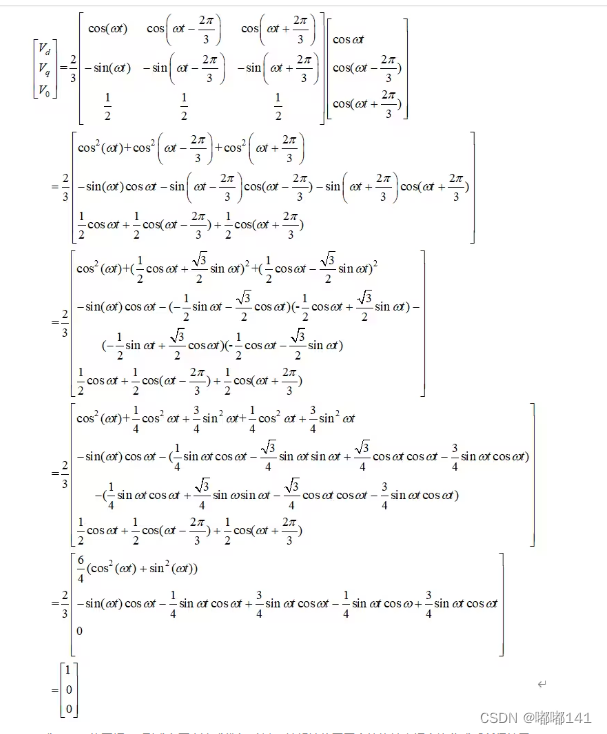
可以得到:Vd==1, Vq == 0; 此时d是主控轴, 给定cos信号时使得d轴分量为1,所以是基于cos型的坐标系。
我们习惯把d轴当做主轴来控制,就是通过变换后最好让d轴分量为1,所以当系统所使用的电压为cos形式时,那么用a轴与d轴重合的形式比较方便,此时d轴为1,对应simulink中的Rotating frame aligned with A axis at t = 0模式;如果系统使用的三相为sin的形式,那么使用d初始时刻滞后于a轴90度时比较方便,此时d轴为1。
三、结论
以d轴初始时滞后a轴90度的情况为例:来自:
来自:彻底搞懂电力电子中的坐标变换_哔哩哔哩_bilibili
通过dq变换后,三相交流电被转换为直流电,这样就使得电力电子设备更容易控制。因为直流电的控制更加简单和灵活,可以通过调节电压和电流来实现精确的控制。同时,dq变换后的直流电可以更容易地进行功率控制、频率控制和相位控制,从而实现对电力系统的精确控制。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐



 24
24 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)