
3D世界如何寻路,导航寻路RecastNavigation解析(上)
Recast Navigation是一个开源的导航网格生成库,用于为游戏和模拟应用提供动态寻路能力。通过对网格模型进行精细的处理,Recast Navigation能够生成高效且可靠的导航网格,使得寻路和移动变得既快捷又精确。这一创新的技术在游戏开发和仿真领域中有着广泛的应用,其设计的巧妙之处值得每一位开发者学习和探索。接下来,让我们深入了解Recast Navigation的核心原理,并总结其设
导航
3D世界如何寻路,导航寻路RecastNavigation解析(中)
3D世界如何寻路,导航寻路RecastNavigation解析(下)
Recast Navigation是一个开源的导航网格生成库,用于为游戏和模拟应用提供动态寻路能力。通过对网格模型进行精细的处理,Recast Navigation能够生成高效且可靠的导航网格,使得寻路和移动变得既快捷又精确。这一创新的技术在游戏开发和仿真领域中有着广泛的应用,其设计的巧妙之处值得每一位开发者学习和探索。接下来,让我们深入了解Recast Navigation的核心原理,并总结其设计精髓。
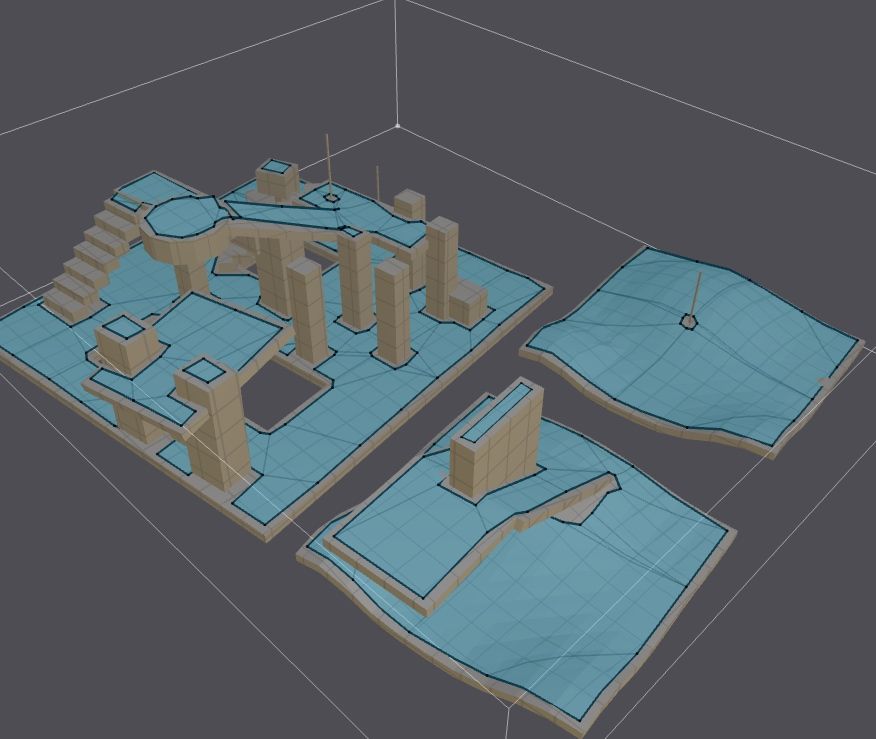
光栅化网格,建立高度场
标记可行走三角形,主要参数Max Slope(可行走最大斜坡)
rcMarkWalkableTriangles(m_ctx, m_cfg.walkableSlopeAngle, verts, nverts, tris, ntris, m_triareas);根据Cell Size和Cell Height光栅化三角形,得到x和z平面体素世界,y用min-max表示
Height高度 Radius半径 Max Climb最大可攀爬高度
m_cfg.cs = m_cellSize;
m_cfg.ch = m_cellHeight;
m_cfg.walkableSlopeAngle = m_agentMaxSlope;根据体素大小转化成,1单位体素
m_cfg.walkableHeight = (int)ceilf(m_agentHeight / m_cfg.ch);
m_cfg.walkableClimb = (int)floorf(m_agentMaxClimb / m_cfg.ch); //向下取整
m_cfg.walkableRadius = (int)ceilf(m_agentRadius / m_cfg.cs);rcRasterizeTriangles具体处理函数
if (!rcRasterizeTriangles(m_ctx, verts, nverts, tris, m_triareas, ntris, *m_solid, m_cfg.walkableClimb))
{
m_ctx->log(RC_LOG_ERROR, "buildNavigation: Could not rasterize triangles.");
return false;
}举个例子,一个三角形如何栅格化呢
从minZ-maxZ,minX-maxX,按cellSize一个格子单位切割
获取到切割的形状,算出minX-maxX,y轴的spanMin-spanMax
剩下的形状,继续切割 7 * 3 表示一个3个点的三角形(3个float),最多可以被一个矩形裁成有7个点的多边形
static bool rasterizeTri(const float* v0, const float* v1, const float* v2,
const unsigned char areaID, rcHeightfield& heightfield,
const float* heightfieldBBMin, const float* heightfieldBBMax,
const float cellSize, const float inverseCellSize, const float inverseCellHeight,
const int flagMergeThreshold)
{
// Calculate the bounding box of the triangle.
float triBBMin[3];
rcVcopy(triBBMin, v0);
rcVmin(triBBMin, v1);
rcVmin(triBBMin, v2);
float triBBMax[3];
rcVcopy(triBBMax, v0);
rcVmax(triBBMax, v1);
rcVmax(triBBMax, v2);
// If the triangle does not touch the bounding box of the heightfield, skip the triangle.
if (!overlapBounds(triBBMin, triBBMax, heightfieldBBMin, heightfieldBBMax))
{
return true;
}
const int w = heightfield.width;
const int h = heightfield.height;
const float by = heightfieldBBMax[1] - heightfieldBBMin[1];
// Calculate the footprint of the triangle on the grid's z-axis
int z0 = (int)((triBBMin[2] - heightfieldBBMin[2]) * inverseCellSize);
int z1 = (int)((triBBMax[2] - heightfieldBBMin[2]) * inverseCellSize);
// use -1 rather than 0 to cut the polygon properly at the start of the tile
z0 = rcClamp(z0, -1, h - 1);
z1 = rcClamp(z1, 0, h - 1);
// Clip the triangle into all grid cells it touches.
float buf[7 * 3 * 4];
float* in = buf;
float* inRow = buf + 7 * 3;
float* p1 = inRow + 7 * 3;
float* p2 = p1 + 7 * 3;
rcVcopy(&in[0], v0);
rcVcopy(&in[1 * 3], v1);
rcVcopy(&in[2 * 3], v2);
int nvRow;
int nvIn = 3;
for (int z = z0; z <= z1; ++z)
{
// Clip polygon to row. Store the remaining polygon as well
const float cellZ = heightfieldBBMin[2] + (float)z * cellSize;
dividePoly(in, nvIn, inRow, &nvRow, p1, &nvIn, cellZ + cellSize, RC_AXIS_Z);
rcSwap(in, p1);
if (nvRow < 3)
{
continue;
}
if (z < 0)
{
continue;
}
// find X-axis bounds of the row
float minX = inRow[0];
float maxX = inRow[0];
for (int vert = 1; vert < nvRow; ++vert)
{
if (minX > inRow[vert * 3])
{
minX = inRow[vert * 3];
}
if (maxX < inRow[vert * 3])
{
maxX = inRow[vert * 3];
}
}
int x0 = (int)((minX - heightfieldBBMin[0]) * inverseCellSize);
int x1 = (int)((maxX - heightfieldBBMin[0]) * inverseCellSize);
if (x1 < 0 || x0 >= w)
{
continue;
}
x0 = rcClamp(x0, -1, w - 1);
x1 = rcClamp(x1, 0, w - 1);
int nv;
int nv2 = nvRow;
for (int x = x0; x <= x1; ++x)
{
// Clip polygon to column. store the remaining polygon as well
const float cx = heightfieldBBMin[0] + (float)x * cellSize;
dividePoly(inRow, nv2, p1, &nv, p2, &nv2, cx + cellSize, RC_AXIS_X);
rcSwap(inRow, p2);
if (nv < 3)
{
continue;
}
if (x < 0)
{
continue;
}
// Calculate min and max of the span.
float spanMin = p1[1];
float spanMax = p1[1];
for (int vert = 1; vert < nv; ++vert)
{
spanMin = rcMin(spanMin, p1[vert * 3 + 1]);
spanMax = rcMax(spanMax, p1[vert * 3 + 1]);
}
spanMin -= heightfieldBBMin[1];
spanMax -= heightfieldBBMin[1];
// Skip the span if it's completely outside the heightfield bounding box
if (spanMax < 0.0f)
{
continue;
}
if (spanMin > by)
{
continue;
}
// Clamp the span to the heightfield bounding box.
if (spanMin < 0.0f)
{
spanMin = 0;
}
if (spanMax > by)
{
spanMax = by;
}
// Snap the span to the heightfield height grid.
unsigned short spanMinCellIndex = (unsigned short)rcClamp((int)floorf(spanMin * inverseCellHeight), 0, RC_SPAN_MAX_HEIGHT);
unsigned short spanMaxCellIndex = (unsigned short)rcClamp((int)ceilf(spanMax * inverseCellHeight), (int)spanMinCellIndex + 1, RC_SPAN_MAX_HEIGHT);
if (!addSpan(heightfield, x, z, spanMinCellIndex, spanMaxCellIndex, areaID, flagMergeThreshold))
{
return false;
}
}
}
return true;
}下面给出2D的动画,63表示可行走区域
过滤可行走表面,不细说了
if (m_filterLowHangingObstacles)
rcFilterLowHangingWalkableObstacles(m_ctx, m_cfg.walkableClimb, *m_solid);
if (m_filterLedgeSpans)
rcFilterLedgeSpans(m_ctx, m_cfg.walkableHeight, m_cfg.walkableClimb, *m_solid);
if (m_filterWalkableLowHeightSpans)
rcFilterWalkableLowHeightSpans(m_ctx, m_cfg.walkableHeight, *m_solid);根据walkableClimb,walkableHeight,更新Span的area
static const unsigned char RC_NULL_AREA = 0;//默认
static const unsigned char RC_WALKABLE_AREA = 63;//可行走反体素化 构建CompactHeightfield紧凑高度场
Span表示一个个实体,可我们只需要知道哪些地方可以行走就行了 为了方便计算,我们把Span反过来,得到一个个可行走的CompactSpan
struct rcCompactSpan
{
unsigned short y; ///< The lower extent of the span. (Measured from the heightfield's base.)
unsigned short reg; ///< The id of the region the span belongs to. (Or zero if not in a region.)
unsigned int con : 24; ///< Packed neighbor connection data.
unsigned int h : 8; ///< The height of the span. (Measured from #y.)
};其中con表示上下左右的连接的邻居CompactSpan
用二进制表示,每个方向用6位表示
并且当前CompactSpan高度>=walkableHeight和邻居的高度<=walkableClimb
static const int RC_NOT_CONNECTED = 0x3f;
默认值为63,6个111111,表示没有可连接的 direction一共4个方向,左上右下,可表示0-62的邻居Span索引
根据walkableRadius半径 标记不可行走区域
算出每个rcCompactSpan到不可行走区域的距离,过滤掉导航半径walkableRadius到不了的区域
算法下面详细说
if (!rcErodeWalkableArea(m_ctx, m_cfg.walkableRadius, *m_chf))
{
m_ctx->log(RC_LOG_ERROR, "buildNavigation: Could not erode.");
return false;
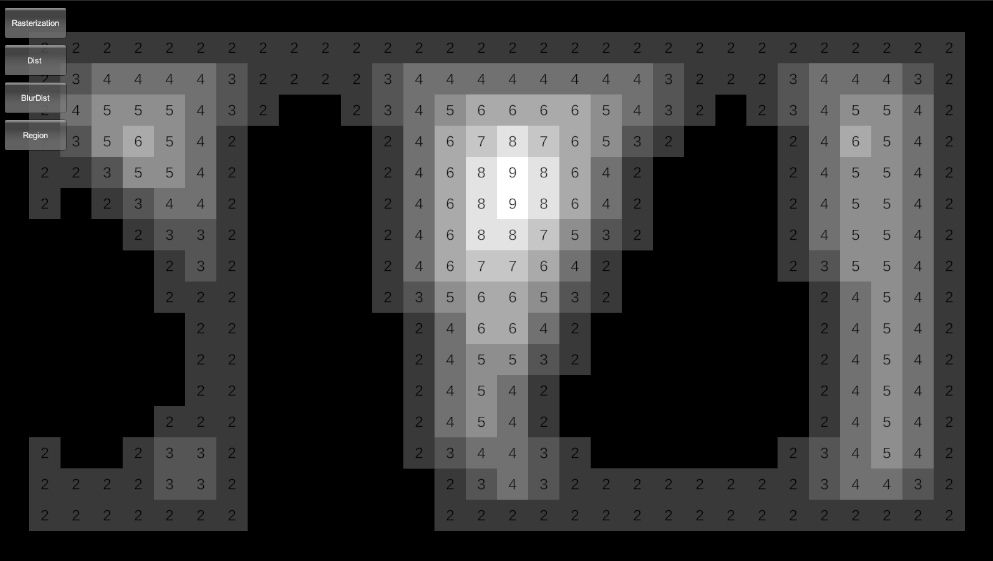
}构建距离场
rcBuildDistanceField(m_ctx, *m_chf)这里和rcErodeWalkableArea有点区别
rcBuildDistanceField只要不不同的区域,就算边界
再用上下扫描法(有没有学名?),算出每个rcCompactSpan到边界的距离
邻边+2,斜边+3
我们再用2D模拟下
static void calculateDistanceField(rcCompactHeightfield& chf, unsigned short* src, unsigned short& maxDist)
{
const int w = chf.width;
const int h = chf.height;
// Init distance and points.
for (int i = 0; i < chf.spanCount; ++i)
src[i] = 0xffff;
// Mark boundary cells.
for (int y = 0; y < h; ++y)
{
for (int x = 0; x < w; ++x)
{
const rcCompactCell& c = chf.cells[x+y*w];
for (int i = (int)c.index, ni = (int)(c.index+c.count); i < ni; ++i)
{
const rcCompactSpan& s = chf.spans[i];
const unsigned char area = chf.areas[i];
int nc = 0;
for (int dir = 0; dir < 4; ++dir)
{
if (rcGetCon(s, dir) != RC_NOT_CONNECTED)
{
const int ax = x + rcGetDirOffsetX(dir);
const int ay = y + rcGetDirOffsetY(dir);
const int ai = (int)chf.cells[ax+ay*w].index + rcGetCon(s, dir);
if (area == chf.areas[ai])
nc++;
}
}
if (nc != 4)
src[i] = 0;
}
}
}
// Pass 1
for (int y = 0; y < h; ++y)
{
for (int x = 0; x < w; ++x)
{
const rcCompactCell& c = chf.cells[x+y*w];
for (int i = (int)c.index, ni = (int)(c.index+c.count); i < ni; ++i)
{
const rcCompactSpan& s = chf.spans[i];
if (rcGetCon(s, 0) != RC_NOT_CONNECTED)
{
// (-1,0)
const int ax = x + rcGetDirOffsetX(0);
const int ay = y + rcGetDirOffsetY(0);
const int ai = (int)chf.cells[ax+ay*w].index + rcGetCon(s, 0);
const rcCompactSpan& as = chf.spans[ai];
if (src[ai]+2 < src[i])
src[i] = src[ai]+2;
// (-1,-1)
if (rcGetCon(as, 3) != RC_NOT_CONNECTED)
{
const int aax = ax + rcGetDirOffsetX(3);
const int aay = ay + rcGetDirOffsetY(3);
const int aai = (int)chf.cells[aax+aay*w].index + rcGetCon(as, 3);
if (src[aai]+3 < src[i])
src[i] = src[aai]+3;
}
}
if (rcGetCon(s, 3) != RC_NOT_CONNECTED)
{
// (0,-1)
const int ax = x + rcGetDirOffsetX(3);
const int ay = y + rcGetDirOffsetY(3);
const int ai = (int)chf.cells[ax+ay*w].index + rcGetCon(s, 3);
const rcCompactSpan& as = chf.spans[ai];
if (src[ai]+2 < src[i])
src[i] = src[ai]+2;
// (1,-1)
if (rcGetCon(as, 2) != RC_NOT_CONNECTED)
{
const int aax = ax + rcGetDirOffsetX(2);
const int aay = ay + rcGetDirOffsetY(2);
const int aai = (int)chf.cells[aax+aay*w].index + rcGetCon(as, 2);
if (src[aai]+3 < src[i])
src[i] = src[aai]+3;
}
}
}
}
}
// Pass 2
for (int y = h-1; y >= 0; --y)
{
for (int x = w-1; x >= 0; --x)
{
const rcCompactCell& c = chf.cells[x+y*w];
for (int i = (int)c.index, ni = (int)(c.index+c.count); i < ni; ++i)
{
const rcCompactSpan& s = chf.spans[i];
if (rcGetCon(s, 2) != RC_NOT_CONNECTED)
{
// (1,0)
const int ax = x + rcGetDirOffsetX(2);
const int ay = y + rcGetDirOffsetY(2);
const int ai = (int)chf.cells[ax+ay*w].index + rcGetCon(s, 2);
const rcCompactSpan& as = chf.spans[ai];
if (src[ai]+2 < src[i])
src[i] = src[ai]+2;
// (1,1)
if (rcGetCon(as, 1) != RC_NOT_CONNECTED)
{
const int aax = ax + rcGetDirOffsetX(1);
const int aay = ay + rcGetDirOffsetY(1);
const int aai = (int)chf.cells[aax+aay*w].index + rcGetCon(as, 1);
if (src[aai]+3 < src[i])
src[i] = src[aai]+3;
}
}
if (rcGetCon(s, 1) != RC_NOT_CONNECTED)
{
// (0,1)
const int ax = x + rcGetDirOffsetX(1);
const int ay = y + rcGetDirOffsetY(1);
const int ai = (int)chf.cells[ax+ay*w].index + rcGetCon(s, 1);
const rcCompactSpan& as = chf.spans[ai];
if (src[ai]+2 < src[i])
src[i] = src[ai]+2;
// (-1,1)
if (rcGetCon(as, 0) != RC_NOT_CONNECTED)
{
const int aax = ax + rcGetDirOffsetX(0);
const int aay = ay + rcGetDirOffsetY(0);
const int aai = (int)chf.cells[aax+aay*w].index + rcGetCon(as, 0);
if (src[aai]+3 < src[i])
src[i] = src[aai]+3;
}
}
}
}
}
maxDist = 0;
for (int i = 0; i < chf.spanCount; ++i)
maxDist = rcMax(src[i], maxDist);
}平滑距离场
static unsigned short* boxBlur(rcCompactHeightfield& chf, int thr,
unsigned short* src, unsigned short* dst)
{
const int w = chf.width;
const int h = chf.height;
thr *= 2;
for (int y = 0; y < h; ++y)
{
for (int x = 0; x < w; ++x)
{
const rcCompactCell& c = chf.cells[x+y*w];
for (int i = (int)c.index, ni = (int)(c.index+c.count); i < ni; ++i)
{
const rcCompactSpan& s = chf.spans[i];
const unsigned short cd = src[i];
if (cd <= thr)
{
dst[i] = cd;
continue;
}
int d = (int)cd;
for (int dir = 0; dir < 4; ++dir)
{
if (rcGetCon(s, dir) != RC_NOT_CONNECTED)
{
const int ax = x + rcGetDirOffsetX(dir);
const int ay = y + rcGetDirOffsetY(dir);
const int ai = (int)chf.cells[ax+ay*w].index + rcGetCon(s, dir);
d += (int)src[ai];
const rcCompactSpan& as = chf.spans[ai];
const int dir2 = (dir+1) & 0x3;
if (rcGetCon(as, dir2) != RC_NOT_CONNECTED)
{
const int ax2 = ax + rcGetDirOffsetX(dir2);
const int ay2 = ay + rcGetDirOffsetY(dir2);
const int ai2 = (int)chf.cells[ax2+ay2*w].index + rcGetCon(as, dir2);
d += (int)src[ai2];
}
else
{
d += cd;
}
}
else
{
d += cd*2;
}
}
dst[i] = (unsigned short)((d+5)/9);
}
}
}
return dst;
}

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 32
32 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)