基于深度强化学习完成移动机器人导航
ROS Gazebo 模拟器中移动机器人导航的深度强化学习。使用TD3神经网络,机器人学习在模拟环境中导航到随机目标点,同时避开障碍物。通过激光读数检测障碍物,并在极坐标中为机器人提供目标。使用 PyTorch 在 ROS Gazebo 模拟器中接受训练。在 Ubuntu 20.04 上使用 python 3.8.10 和 PyTorch 1.10 使用 ROS Noetic 进行测试。
·
ROS Gazebo 模拟器中移动机器人导航的深度强化学习。使用TD3神经网络,机器人学习在模拟环境中导航到随机目标点,同时避开障碍物。通过激光读数检测障碍物,并在极坐标中为机器人提供目标。使用 PyTorch 在 ROS Gazebo 模拟器中接受训练。在 Ubuntu 20.04 上使用 python 3.8.10 和 pytorch 1.10 使用 ROS Noetic 进行测试。
本文使用借鉴了 Goal-Driven Autonomous Exploration Through Deep Reinforcement Learning 这篇论文
https://github.com/reiniscimurs/DRL-robot-navigation
1.前期准备
所需要的依赖:
ROS Noetic
PyTorch
https://pytorch.org/get-started/locally/Tensorboard
https://github.com/tensorflow/tensorboard2.下载源码
git clone https://github.com/reiniscimurs/DRL-robot-navigation3.编译工作空间
cd ~/DRL-robot-navigation/catkin_ws
catkin_make_isolatedPS:这里请注意,一般刚开始编译工作空间时,可能会出现各种各样的库缺失,具体缺失的内容可以根据实际报错信息,然后安装
sudo apt install ros-noetic-$ 你缺失的库 $
还有可能出现额外的问题,建议删除catkin_ws下除src的所有文件。
4.打开终端并设置
export ROS_HOSTNAME=localhost
export ROS_MASTER_URI=http://localhost:11311
export ROS_PORT_SIM=11311
export GAZEBO_RESOURCE_PATH=~/DRL-robot-navigation/catkin_ws/src/multi_robot_scenario/launch
source ~/.bashrc
cd ~/DRL-robot-navigation/catkin_ws
source devel_isolated/setup.bash5.进行训练
cd ~/DRL-robot-navigation/TD3
python3 train_velodyne_td3.py
终止训练:
killall -9 rosout roslaunch rosmaster gzserver nodelet robot_state_publisher gzclient python python36.tensorboard查看训练结果
cd ~/DRL-robot-navigation/TD3
tensorboard --logdir runsPS:如果tensorboard无法显示相应的曲线,显示No dashboards are active for the current data set,建议更换浏览器,在谷歌浏览器中打开
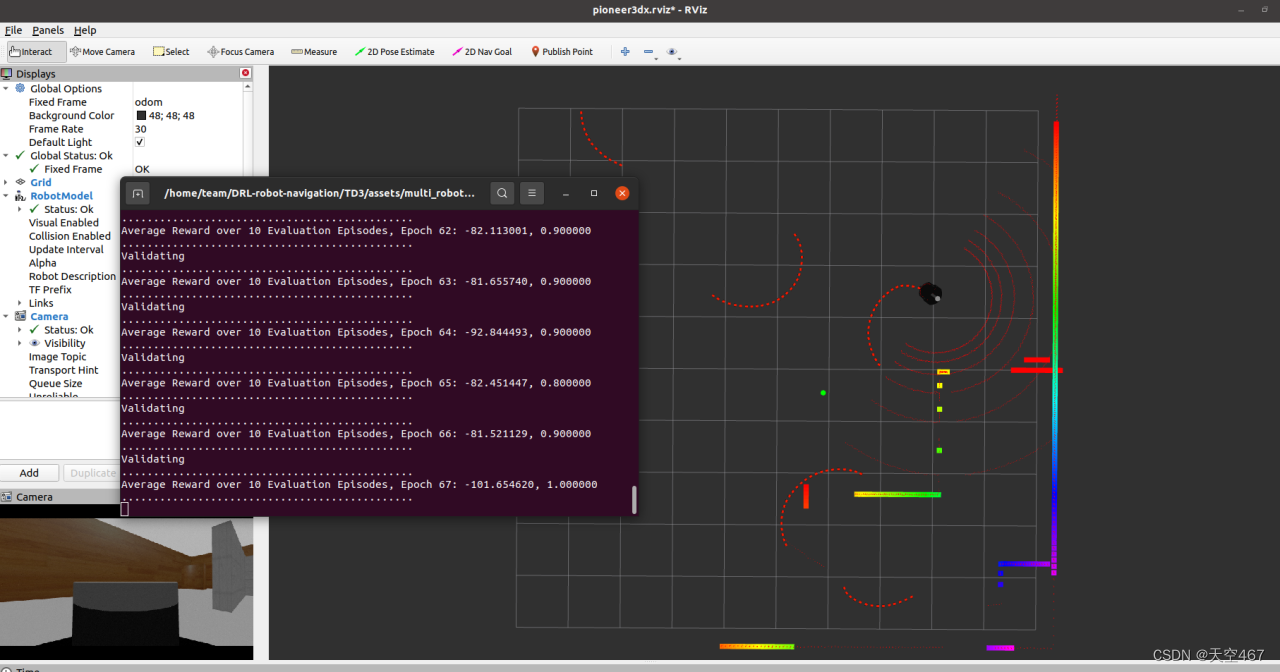
7.完成训练,测试模型
cd ~/DRL-robot-navigation/TD3
python3 test_velodyne_td3.pyPS:训练呈现

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 10
10 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)