

基于STM32和PID算法实现小车循迹
通过这次功能的实现,我清楚的了解循迹传感器、驱动电机、PID算法控制的原理和使用,还有实现一个功能需要不断的调试,测试,同时也了解自己的不足,还是有很大的提升空间,加油,共勉。
本文用的单片机是STM32F103C8T6,循迹模块是五路循迹传感器,电机是直流电机,电机驱动模块是L293D
效果展示
这里是没优化完成的效果,后续优化完成会呈上
视频演示:https://www.bilibili.com/video/BV1ka4y197B8/
基于STM32和PID控制算法实现循迹功能
五路循迹传感器
工作原理
五路循迹传感器的核心是五个感光二极管,通过感知地上的黑线,从而实现对小车运动轨迹的控制和调整。就是这么简单!
传感器的工作原理是通过五个感光电二极管来感知地面上的黑线。当小车运动到黑线上方时,这些感光电二极管会接收到反射回来的光线,从而变化电子状态并产生电压信号。这些信号经过放大和滤波处理后,成为高低电平信号,被输入到控制器中,控制器再通过算法来分析这些数据,从而判断小车的位置和方向,并调整运动轨迹,使小车按照预设路径行驶。
硬件
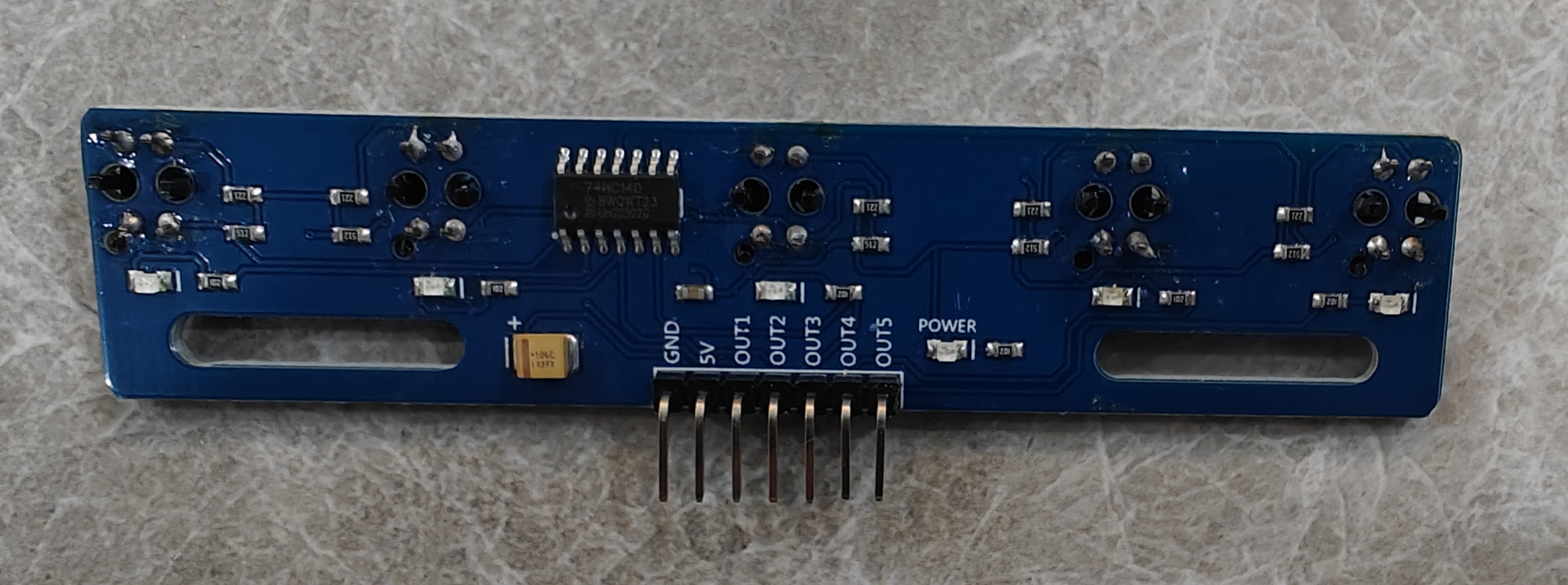
五路循迹模块
引脚
让我们看一下它的引脚排列。
GND 是连接到STM32的地。
VCC 是传感器的电源,我们连接了5V的供电。
OUT1~OUT5 是5个传感器的引脚,用于发送电平信号。
接线
将五路循迹模快连接到STM32。
| 五路循迹传感器 | STM32 |
|---|---|
| VCC | 5V |
| GND | GND |
| OUT1 | GPIO PA4 |
| OUT2 | GPIO PA5 |
| OUT3 | GPIO PA6 |
| OUT4 | GPIO PA7 |
| OUT5 | GPIO PB0 |
L293D电机驱动模块
L293D是一种基本的电机驱动器集成芯片(IC),它能够在任意方向驱动直流电机并控制惦记的速度。L293D是一个16引脚IC,每侧有8个引脚,可以很好的控制电机。
电路图
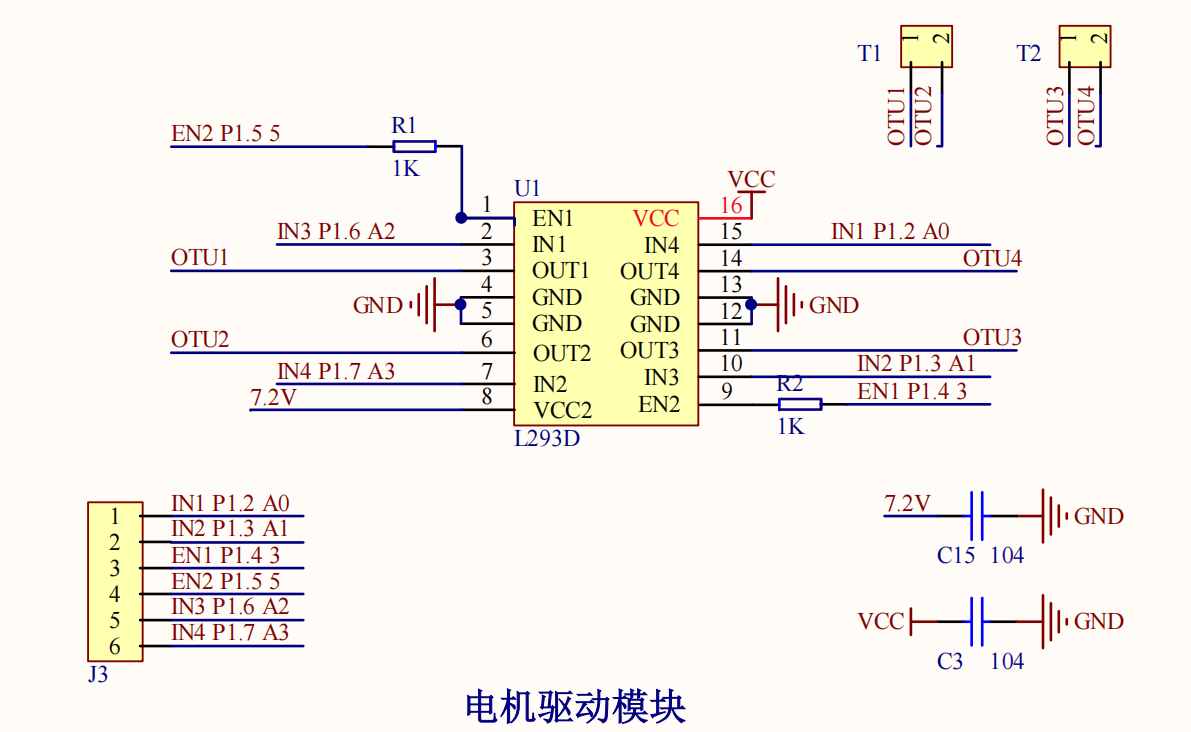
工作原理
L293D有4个方向控制输入引脚,IC左侧的引脚2、7(A2和A3)和右侧的引脚15、10(A0和A1)。左侧输入引脚调节连接在左端的电机旋转,右侧输入引脚调节右侧的电机。电机根据输入引脚上提供的高电平或低电平信号进行旋转。
例如:
- 引脚2 = 高,引脚7 = 低 顺时针旋转
- 引脚2 = 低,引脚7= 高 逆时针旋转
- 引脚2 = 低,引脚7 = 低 无旋转
- 引脚2 = 高,引脚7= 高 无旋转
右侧同理。
接线
本次接线因为有底板设计了电机驱动模快,我们只需将4个输入引脚接在核心板上。
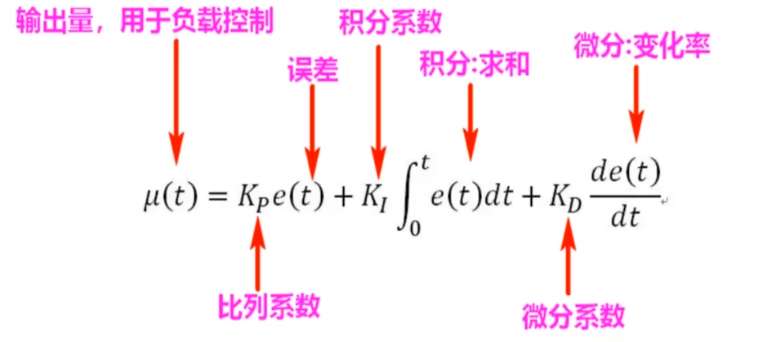
PID控制算法
PID是比例(proportion)、积分(integral)、微分(derivative)是一种闭环控制算法,通过反馈值进行误差计算,然后通过PID算法控制负载设备。
公式
原理
在PID控制器中,比例环节的作用是对偏差瞬间做出反应。偏差一旦产生控制器立即产生控制作用,使控制量向减少偏差方向变化。控制作用的强弱取决于比例系数,比例系数越大,控制作用越强,则过渡越快,控制过程的静态偏差也就越小;但是越大,也越容易产生振荡,破坏系统的稳定性。故而,比例系数选择必须恰当,才能过渡时间短,稳定的效果。
积分,顾名思义就是一个累加的过程,积分调节的输出是与输入、输出反馈的误差的积分成正比关系,所以积分调节器的作用就是用来消除稳态误差。
为了加快调节过程,在偏差出现的瞬间,或在偏差变化的瞬间,不但要对偏差量做出立即响应,而且要根据偏差的变化趋势预先给出适当的纠正。
自动循迹思路

误差分析
约定左右轮速度调整:
left_motor_pwm_speed = left_motor_pwm_speed + pid_output
right_motor_pwm_speed = right_motor_pwm_speed - pid_output
1.异常情况,小车向需要右偏(左轮速度增加,右轮减少)
case 0x19: cur_error = 2; break; //B11001
case 0x1d: cur_error = 4; break; //B11101
case 0x1c: cur_error = 6; break; //B11100
case 0x18: cur_error = 7; break; //B11000
case 0x1e: cur_error = 8; break; //B11110
2.正常情况
case 0x0 : //B00000
case 0x1b: cur_error = 0; break; //B11011
3.异常情况,小车向需要左偏(右轮速度增加,左轮减少)
case 0x13: cur_error = -2; break; //B10011
case 0x17: cur_error = -3; break; //B10111
case 0x3 : cur_error = -4; break; //B00111
case 0x7 : //B00111
case 0x1 : cur_error = -7; break; //B00001
case 0xf : cur_error = -8; break; //B01111
4.极端情况,小车已经冲出赛道,根据冲出之前的误差,将误差调整到最大
case 0x1f: cur_error = pid.error > 0 ? 9 : -9; break;//B11111五路循迹管电平读取状态代码
#define MOTOR_PWM_SPEED 500
#define MOTOR_PWM_MAX_SPEED 700
#define MOTOR_PWM_MIN_SPEED 0
#define PID_KP 25
#define PID_KI 0.8
#define PID_KD 15
typedef struct {
int8_t error;
int8_t last_error;
int8_t kp;
float ki;
int8_t kd;
} pid_t;
bool pid_contorl = true;
pid_t pid;
int32_t left_motor_pwm_speed = MOTOR_PWM_SPEED;
int32_t right_motor_pwm_speed = MOTOR_PWM_SPEED;
//读取状态
uint8_t read_irs_state( void )
{
int i;
uint8_t status = 0;
uint8_t state[5];
state[0] = HAL_GPIO_ReadPin( GPIOA,GPIO_PIN_4 );
state[1] = HAL_GPIO_ReadPin( GPIOA,GPIO_PIN_5 );
state[2] = HAL_GPIO_ReadPin( GPIOA,GPIO_PIN_6 );
state[3] = HAL_GPIO_ReadPin( GPIOA,GPIO_PIN_7 );
state[4] = HAL_GPIO_ReadPin( GPIOB,GPIO_PIN_0 );
for( i = 0; i < 5; i++ ) {
status |=( state[i] << i );
}
return status;
}
采用中值滤波算法获取传感器状态
uint8_t get_middle_filter_irs_state( void )
{
int i;
uint8_t state[9];
for( i =0; i<9; i++ ) {
state[i] = read_irs_state();
}
printf( "irs:" );
for( i =4; i>=0; i-- ) {
if( state[4] & ( 1 << i ) ) {
printf( "1" );
} else {
printf( "0" );
}
}
printf( "\r\n" );
return state[4];
}根据传感器状态获取误差值
uint8_t calc_error_by_irs( uint8_t state )
{
int8_t cur_error = pid.error;
switch( state ) {
case 0x19: cur_error = 2; break; //B11001
case 0x1d: cur_error = 4; break; //B11101
case 0x1c: cur_error = 6; break; //B11100
//case 0x18: cur_error = 6; break; //B11000
case 0x18: cur_error = 7; break; //B11000
case 0x1e: cur_error = 8; break; //B11110
case 0x0 : //B00000
case 0x1b: cur_error = 0; break; //B11011
case 0x13: cur_error = -2; break; //B10011
case 0x17: cur_error = -4; break; //B10111
//case 0x7 : cur_error = -5; break; //B00111
case 0x3 : cur_error = -6; break; //B00111
case 0x7 : //B00111
case 0x1 : cur_error = -7; break; //B00001
case 0xf : cur_error = -8; break; //B01111
case 0x1f: cur_error = pid.error > 0 ? 9 : -9; break;//B11111
}
return cur_error;
}采用平均数求和滤波算法获取当前的误差值
int8_t get_current_irs_error( void )
{
int i;
int sum =0;
for( i = 0; i < 10; i++ ) {
int8_t state = get_middle_filter_irs_state();
int8_t error = calc_error_by_irs( state );
sum += error;
}
return sum/10;
}根据误差值用PID算法算出输出的控制量调整左右轮速度
int32_t pid_calc_output( void )
{
int32_t P;
static int32_t I;
int32_t D;
int32_t pid_output;
pid.error = get_current_irs_error();
P = pid.kp * pid.error;
I +=pid.ki * pid.error;
D = pid.kd * ( pid.error -pid.last_error );
pid.last_error = pid.error;
pid_output = P + I + D;
return pid_output;
}
void update_motor_speed_by_pid( int32_t pid_output )
{
if(!pid.error){
left_motor_pwm_speed = MOTOR_PWM_SPEED;
right_motor_pwm_speed = MOTOR_PWM_SPEED;
return;
}
left_motor_pwm_speed = left_motor_pwm_speed + pid_output;
if( left_motor_pwm_speed <=MOTOR_PWM_MIN_SPEED ) {
left_motor_pwm_speed = MOTOR_PWM_MIN_SPEED;
} else if( left_motor_pwm_speed >= MOTOR_PWM_MAX_SPEED ) {
left_motor_pwm_speed = MOTOR_PWM_MAX_SPEED;
}
right_motor_pwm_speed = right_motor_pwm_speed - pid_output;
if( right_motor_pwm_speed <=MOTOR_PWM_MIN_SPEED ) {
right_motor_pwm_speed = MOTOR_PWM_MIN_SPEED;
} else if( right_motor_pwm_speed >= MOTOR_PWM_MAX_SPEED ) {
right_motor_pwm_speed = MOTOR_PWM_MAX_SPEED;
}
return;
}PID参数初始化
#define PID_KP 5
#define PID_KI 0.01
#define PID_KD 10
void pid_init( void )
{
pid.error = 0;
pid.last_error = 0;
pid.kp = PID_KP;
pid.ki = PID_KI;
pid.kd = PID_KD;
return;
}根据PID算法控制小车
#define MOTOR_PWM_SPEED 500
#define MOTOR_PWM_MAX_SPEED 700
#define MOTOR_PWM_MIN_SPEED 0
void pid_control_motor( void )
{
if(pid.error >= 7 && pid.error <= 9){
car_turn_right(MOTOR_PWM_MAX_SPEED);
return;
}else if(pid.error >= -9 && pid.error <= -7){
car_turn_left(MOTOR_PWM_MAX_SPEED);
return;
}
left_motor_forward( left_motor_pwm_speed );
right_motor_forward( right_motor_pwm_speed );
}
void pid_control_car( void )
{
int32_t pid_output;
pid_init();
while( pid_contorl ) {
pid_output = pid_calc_output();
update_motor_speed_by_pid( pid_output );
pid_control_motor();
HAL_Delay( 10 );
}
return;
}总结
通过这次功能的实现,我清楚的了解循迹传感器、驱动电机、PID算法控制的原理和使用,可以实现智能巡线、物品跟随等功能,同时也了解自己的不足,还是有很大的提升空间,加油!

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 39
39 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)