
PID控制参数整定(调节方法)原理+图示+MATLAB调试
首先调节P的数量级达到一个只有2个左右明显峰值的波形,再调节I找到不会波形振荡也不会没有超调的的区间,在区间内找到一个I将稳态误差尽可能消除。最终使用D来控制衰减比和波形的峰值、超调量。最后根据要求的稳态值、调节时间、超调量、上升时间、峰值时间等指标进行微调达到目标。最后可以总结成一个口诀参数整定找最佳,从小到大顺序查,先是比例后积分,最后再把微分加,曲线振荡很频繁,比例度盘要放大,曲线漂浮绕大湾
PID控制参数整定(调节方法)原理+图示+MATLAB调试
Chapter1 PID控制参数整定(调节方法)原理+图示+MATLAB调试
原文链接:https://blog.csdn.net/viafcccy/article/details/107988093
序
首先最重要的是了解每个参数调节了系统响应的那些属性,通过观察响应从而调节参数改变属性。
PID的作用概述:
1、P产生响应速度和力度,过小响应慢,过大会产生振荡,是I和D的基础。
2、I在有系统误差和外力作用时消除偏差、提高精度,同时也会增加响应速度,产生过冲,过大会产生振荡。
3、D抑制过冲和振荡,过小系统会过冲,过大会减慢响应速度。D的另外一个作用是抵抗外界的突发干扰,阻止系统的突变。
同时调节的顺序是:P>I>D
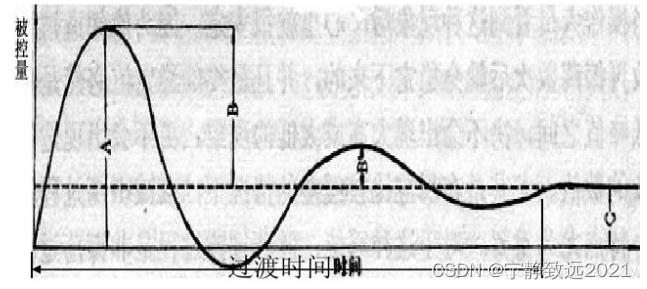
下面了解的一个很重要的就是调节的目标,也就是最好的响应曲线是什么样子。
PID 调节目标:
1、衰减比在4-10之间最佳,也就是响应曲线的前两个峰值B:B1的比值在4-10之间。
2、稳态误差趋近于0
3、系统响应越快越好

一、P参数选取
tip:在第一步牢记P产生响应速度和力度,过小响应慢,过大会产生振荡,是I和D的基础。
如果想自己调试尝试可以打开matlab,运行simulink,照着下面的图进行连接,如果想直接应用可以直接往后看。
图中的系统为一个PID控制二阶系统。

拿上面的系统进行举例,首先设定P=0.1,I=0,D=0观察响应。可以看到图像没有超调,说明P产生的响应速度和力度太小了,

P=1,I=0,D=0观察系统响应,超调量出现但是只有一个波形,同时也就意味着调节时间太慢了,继续加大P

P=10,I=0,D=0,此时调节时间显著下降,可以看到此时的数量级已经调整完成,也就是P参数只需要微调

P=100,I=0,D=0,系统开始变得振荡

如果继续加大P,系统会达到一个临界值,产生等幅振荡,最后开始发散。如下图所示:

二、I的调节
tip:I在有系统误差和外力作用时消除偏差、提高精度,同时也会增加响应速度,产生过冲,过大会产生振荡。
I主要调节稳态输出,消除扰动。由于系统没有扰动输入因此看不到I对于消除扰动的效果。P=10,I=10,D=0,此时I过大导致系统振荡加剧。

P=10,I=1,D=0,此时响应波形基本符合预期。观察稳态输出约为0.963左右。


P=10,I=0.1,D=0,可以看到几乎响应波形没有变化。说明在没有扰动的情况下I只要不过大影响不大。但是稳态输出变化为0.916


P=10,I=0,D=0,稳态输出变为0.91左右。

最终我们可以通过I少量调节稳态输出的值,最终将稳态误差消除。关于I对波形影响的作用总结如下图:

三、D的调节
tip:D抑制过冲和振荡,过小系统会过冲,过大会减慢响应速度。D的另外一个作用是抵抗外界的突发干扰,阻止系统的突变。
P=10,I=0.1,D=10,可以看到将所有的冲击都消除掉了。

P=10,I=0.1,D=1,消除冲击减弱,此时显然衰减比不符合要求

P=10,I=0.1,D=1,此时基本符合要求。

四、总结
首先调节P的数量级达到一个只有2个左右明显峰值的波形,再调节I找到不会波形振荡也不会没有超调的的区间,在区间内找到一个I将稳态误差尽可能消除。最终使用D来控制衰减比和波形的峰值、超调量。最后根据要求的稳态值、调节时间、超调量、上升时间、峰值时间等指标进行微调达到目标。
最后可以总结成一个口诀
参数整定找最佳,从小到大顺序查,
先是比例后积分,最后再把微分加,
曲线振荡很频繁,比例度盘要放大,
曲线漂浮绕大湾,比例度盘往小扳,
曲线偏离回复慢,积分时间往下降,
曲线波动周期长,积分时间再加长,
曲线振荡频率快,先把微分降下来,
动差大来波动慢,微分时间应加长,
理想曲线两个波,前高后低4比1,
一看二调多分析,调节质量不会低 。
Chapter2 PID参数调整,个人经验(配输出曲线图)
原文链接:https://blog.csdn.net/weixin_44407238/article/details/119255699
Chapter3 PID温度控制参数整定方法
原文链接:https://blog.csdn.net/pengzhihui2012/article/details/50380780
最近做了一个温度控制相关的项目,在此记录一下,方便以后查找,同时也供大家参考,欢迎指正,所有数据均为实验数据,绝对真实。
-
位置式PID控制公式原型:u(t) = kp * e(t) + ki * [e(1) + e(2) + ....+ e(t)] + kd * [e(t) - e(t-1)] -
控制对象:加热/制冷器(在2分钟内不能再加热至冷之间切换)控制密封的腔体(空间体积大小15cm*20cm*65cm)温度。 -
控制原理:利用MCU的输出比较模块(OCM)产生PWM波驱动H桥电路(通过目标温度和环境温度对比决定加热或者制冷)。 -
PID参数整定

参数说明:
Kc: 只采用比例环节控制条件下,控制系统的稳态误差尽量达到最小时的Kp值。
Pc: 只采用比例环节控制条件下,控制系统的震荡周期。
Ti: 控制系统的积分时间。
Td: 控制系统的微分时间。
T: PID控制采样计算周期。
Kp、Ki、Kd:被整定的参数。
1):获取合适的Kc值,设置Ki,Kd为0。在当前温度进入目标温度3.5°内开始进行PID控制,之前采用90%恒定功率加热。

图一(Kc =5)

图二(Kc =9)

图三(Kc =20)
从上述的四组数据中可以看到,当Kc=5时,控制系统的稳态误差是最小的。在目标范围正负3°之间,选取Kc = 5.
2):计算Pc值。从上述的图一(将.csv格式的数据文件在excel中转换图表,将鼠标放在曲线上,会自动显示此点的坐标,如图所示),取4个震荡周期一共720个点,得出一个震荡周期为Pc=720*5/4= 900s。
3):根据个人需要采用哪种PID组合来计算Ti、Td、Kp、Ki、Kd。温度控制是属于滞后控制,而PID控制中的,微分项是具有超前调节的作用,因此必须引入;积分项对误差的作用取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,推动控制器的输出向稳态误差减小的方向变化,直到稳态误差等于零。我采用的是PID组合来控制。得出Ti=9000.5=450s。Td=9000.15=135s。
Kp=50.65=3.25;Ki= KpT/Ti=3.255/450=0.036;Kd= KpTd/T=3.25*135s /5=88。
4):采用PID控制温度,无论高温低温,稳态误差均在正负0.5°范围之内。如下所示:



一般根据模型计算的参数不一定是适合所有的控制系统(这里实验得到的最佳Kd值为120,而我们算出来的是88),根据特定的环境调节参数范围,找到最优参数,因本系统是滞后系统,微分项起主导作用,我暂时还只做了调整kd值的实验,Ki一般反应在系统达到稳态的时候是否存在稳定误差,从实验结果得出,稳态误差几乎可以忽略。
零下一度的目标温度,连续8小时的温度控制数据:

附录://PWM频率为1Khz,定时器的计数周期为5000(mPID.MaxDuty = 5000*90%),PID返回值和上次的的定时器技术值决定本次的占空比。
INT32 PID_calculate(double CurTemp)
{
INT32 RetValue;
doubleresult_value;
// Keep previouserror
mPID.PrevError =mPID.Error;
// calculatecurrent error
mPID.Error =mPID.Target - CurTemp;
// calculateintegral
mPID.SumError +=mPID.Error;
if(mPID.Kd >0.0001)
{
result_value =mPID.Kp * mPID.Error + mPID.SumError * mPID.Ki +
mPID.Kd* (mPID.Error - mPID.PrevError);
}
else
{
result_value =mPID.Kp * mPID.Error + mPID.SumError * mPID.Ki;
}
RetValue =(INT32)result_value;
return RetValue;
}
//Timer interrupt enable control flag, execute temperaturecontrol.
//
void TemperatureControl()
{
INT32 ret = 0;
if(mPID.type ==HEAT)
{
INT32 DutyValue= OC4RS;
if(fabs(mPID.Current- mPID.Target) <= PIDControlStartPoint)
{
PIDControlStartPoint = 12;
ret =PID_calculate(mPID.Current);
}
elseif(fabs(mPID.Current - mPID.Target) <= TempControlStartPoint)
{
OC4RS = INITPWMPERIOD16 * 50 / 100.0;
ret = 0;
return ;
}
else
{
ret = 0;
}
if( (DutyValue+ ret) > mPID.MaxDuty)
OC4RS =mPID.MaxDuty;
else if(DutyValue+ ret < mPID.MinDuty)
OC4RS =mPID.MinDuty;
else
OC4RS +=ret;
}
else if(mPID.type== COOL)
{
INT32 DutyValue= OC3RS;
if(fabs(mPID.Current - mPID.Target) <= PIDControlStartPoint)
{
PIDControlStartPoint = 12;
ret =PID_calculate(mPID.Current);
ret = -ret;// must be negative
}
elseif(fabs(mPID.Current - mPID.Target) <= TempControlStartPoint)
{
if(mPID.Target > 5.1)
OC3RS =INITPWMPERIOD16 * 70 / 100.0;
else
OC3RS =INITPWMPERIOD16 * 78 / 100.0;
ret = 0;
return ;
}
else
{
ret = 0;
}
if( (DutyValue+ ret) > mPID.MaxDuty)
OC3RS =mPID.MaxDuty;
elseif(DutyValue + ret < mPID.MinDuty)
OC3RS =mPID.MinDuty;
else
OC3RS +=ret;
}
else
{}
}
Chapter4 simulink中的PID模块的使用
原文链接:https://blog.csdn.net/wanrenqi/article/details/105278918
1、Simulink中PID模块的介绍
首先,找到PID模块,双击打开模块的参数设置,如下:

下面介绍几种常用功能的参数设置。
1.1、控制器类型选择
可以看到Controller:可以选择PI、PD和PID控制等。
1.2、PID控制器格式
Form:有并行(默认)和理想型(串行),其传函如下:

注意:传函中的P、I、D系数就是我们需要整定的三个PID参数。
1.3、时域选择
Time domain:连续时间和离散时间。
当选择离散时间时,需要设置积分器和微分器中的滤波器的离散化方法,有向前欧拉,后向欧拉,
双线性变换法,如下图:


1.4、PID的饱和输出限制
限制PID的输出,还有去饱和积分的方法,如,反算法、钳位法。如图所示:

当然我们也可以自己搭一个PID控制器。
2 、自建PID模块
下面搭建一个常用的离散型带输出饱和限制和积分饱和限制的PI控制器。如下:

从这个离散的PI控制模块中,可以看出积分环节是带有限幅输出的,当然还要对这个积分模块的限幅进行设置勾选,如图:

为什么我们需要对积分环节进行单独的限制输出。看个例子:

这个是带有积分饱和限制的PI控制器调节出来的系统响应。

这个是用simulink系统自带的PI控制器调节出来的系统响应,两个PI控制器的参数设置一样。但是带抗饱和积分的PI控制器调节出来的系统响应效果明显更好。
那么什么时候需要加积分环节限制输出呢?当系统在抗扰动时,需要一个大的Ki参数来快速消除稳态误差,而在开始从0到稳态这个过程又会因为ki太大而引起过大超调时,这个时候就需要加积分过饱和限制。
Chapter5 simulink实现模糊PID控制
原文链接:https://blog.csdn.net/qq_36949278/article/details/105569943
模糊系统建立
在matlab命令行输入fuzzy打开模糊系统设计器,设定输入个数为2,范围均为[-3,3],输出个数为3,范围均为[-1,1],模糊系统如下图。根据相关文献定义规则,将建立好的模糊文件命名为Fuzzy_PID并保存到本地文件中,用于下一步的导入。

simulink实现
主程序设计
通过阶跃函数模拟输入信号,将输入信号分别传入自带PID模块与编写的模糊PID模块,将两个模块的控制结果及阶跃信号值通过scope函数进行展示,整体程序框图如下。

PID模块参数设置为P:0.05,I:0.01,D:0.005。
模糊PID模块
将阶跃信号传入系统,系统通过反馈计算误差及误差变化率,将误差及误差变化率乘以各自的量化因子,模糊系统的误差及误差变化率的值域均为[-3,3],假设实际的误差范围为[-8,8],误差变化率范围为[-16,16],则量化因子分别为0.375和0.1875。量化后的值通过saturation函数处理后传入模糊系统,模糊系统设定如下图,其中Fuzzy_PID应在命令行通过如下语句导入到系统中。
Fuzzy_PID = readfis(‘Fuzzy_PID’)

模糊系统设定输出的范围均为[-1,1],因此也应根据相关经验乘以量化因子,并与初始PID参数,即P:0.05,I:0.01,D:0.005求和,处理后的参数传入PID系统中,结合了模糊规则及PID控制的系统即为模糊PID控制系统,系统的程序框图如下。

结果展示
运行程序,点击scope可查看运行结果如下图,可以看出模糊PID比单独PID更早到达设定值,具有更好的响应速度。

Chapter6 飞思卡尔智能车----模糊PID算法通俗讲
在讲解模糊PID前,我们先要了解PID控制器的原理(本文主要介绍模糊PID的运用,对PID控制器的原理不做详细介绍)。PID控制器(比例-积分-微分控制器)是一个在工业控制应用中常见的反馈回路部件,由比例单元P、积分单元I和微分单元D组成。PID控制的基础是比例控制;积分控制可消除稳态误差,但可能增加超调;微分控制可加快大惯性系统响应速度以及减弱超调趋势。
1.1传统PID控制

传统PID控制器自出现以来,凭借其结构简单、稳定性好、工作可靠、调整方便等优点成为工业控制主要技术。当被控对象的结构和参数具有一定的不确定性,无法对其建立精确的模型时,采用PID控制技术尤为方便。PID控制原理简单、易于实现,但是其参数整定异常麻烦。对于小车的速度控制系统而言,由于其为时变非线性系统不同时刻需要选用不同的PID参数,采用传统的PID控制器,很难使整个运行过程具有较好的运行效果。
1.2模糊PID控制
模糊PID控制,即利用模糊逻辑并根据一定的模糊规则对PID的参数进行实时的优化,以克服传统PID参数无法实时调整PID参数的缺点。模糊PID控制包括模糊化,确定模糊规则,解模糊等组成部分。小车通过传感器采集赛道信息,确定当前距赛道中线的偏差E以及当前偏差和上次偏差的变化ec,根据给定的模糊规则进行模糊推理,最后对模糊参数进行解模糊,输出PID控制参数。

2.1模糊化
模糊控制器主要由三个模块组成:模糊化,模糊推理,清晰化。具体如下图所示。而我们将一步步讲解如何将模糊PID算法运用到智能车上。(最好用笔一步步自己写一遍!!!)

首先我们的智能车会采集到赛道的相关数据,例如摄像头车,其采集到的数据经过算法处理之后会得到与中线的偏差E,以及当前偏差和上次偏差的变化(差值)EC两个值(即此算法为2维输入,同理也可以是1维和3维,但2维更适合智能车)。例如此时车偏离中线的距离为150,而上一时刻偏离中线的距离为120,则E为150,EC为150 - 120 = 30。
其次我们要对这两个值进行模糊化。这里我们对E进行举例。摄像头车采集回来的E是有范围的,即与中线的偏差是在一个区间内可行的。在这里我们假设该区间为-240到240,即小车偏离中线的最大距离为240,正负即为左右。再假设中线偏差变化率的可行区间为-40到+40。
接着我们要对这两个值进行模糊化。我现在将E的区间(-240 到 240)分成8个部分,那么他们分别为-240 ~ -180,-180 ~ -120 ,-120 ~ -60,-60 ~ 0,0 ~ 60,60 ~ 120,120 ~ 180,180 ~ 240。然后我们把-180,-120,-60,0,60,120,180分别用NB,NM,NS,ZO,PS,PM,PB表示(个人理解N为negative,P为positive,B为big,M为middle,S为small,ZO为zero)。例如,当E = 170时,此时的E属于PM和PB之间,而此时的E也会对应2(或1)个隶属度。E隶属于PM(120)的百分比为(180 - 170) / (180 - 120) = 1 / 6 ,而同理隶属于PB(180)的百分比为(170 - 120) / (180 - 120) = 5 / 6 。意思就是120到180进行线性分割了,E离PM和PB哪个更近,则隶属于哪个就更大(当输出值E大于180(PB)时,则隶属度为1,隶属度值为PB,即E完全隶属于PB,同理当E小于 - 180 (NB)时也一样)。同理也可以对EC进行模糊化。
2.2 模糊推理
对于采集回来的E和EC,我们可以推出它们各所占的隶属度,此时我们可以根据模糊规则表去找出输出值所对应的隶属度。

我们假设为E的两个隶属度值为PM、PB,E属于PM的隶属度为a(a < 1),则属于PB的隶属度为(1 - a)。再假设EC的两个隶属度值为NB、NM,EC属于NM的隶属度为b,则属于NB的隶属度为(1 - b)。而在假设中,E属于PM的隶属度为a,EC属于NB的隶属度为( 1 - b ),则输出值属于ZO的隶属度为a *( 1 - b )(看图)。

同理我们可以得出,当输出值属于ZO的另外两个隶属度为a * b, ( 1 - a ) * ( 1 - b) ,而输出值属于NS的隶属度为( 1 - a ) * 1 - b。
在这里我们先证明一个条件,将这四个隶属度加起来,刚好等于1。这是因为
(a + (1 - a)) * (b + (1 - b)) = a * b + ( 1 - a ) * b + a * ( 1 - b ) + ( 1 - a ) * ( 1 - b ) (下图)
即一个十字相乘的概念。这个等式说明输出值的隶属度之和等于1(第三步求解的时候需要用到隶属度之和)。

因此,我们知道了输出值为ZO的隶属度和为 a * b + a * ( 1 - b ) + ( 1 - a ) * ( 1 - b ) ,输出值为NS的隶属度为 ( 1 - a ) * b 。
2.3 清晰化
对于输出值,我们同样采用给予隶属度的办法。例如,我们把输出值假设为[1000,1400](即舵机的摆角值范围)的区间同样划分为八个部分,即7个隶属值NB,NM,NS,ZO,PS,PM,PB。根据上一步所得出的结论,我们就可以用隶属度乘以相应的隶属值算出输出值的解,即 (a * b + a * ( 1 - b ) + ( 1 - a ) * ( 1 - b ) ) * ZO + ( 1 - a ) * b * NS。到此为止,整个模糊过程就结束了。
3 模糊PID
我们已经知道了整个模糊的过程,但上述的过程还不够完美。因为我们的输出值只有一个输出,并没有实现PID。因此我们可以先对E和EC进行模糊化,然后分别对kp和ki和kd(PID的三个参数)进行求解,再套入公式。

一般的我们也可以只用kp,kd,不用ki。而模糊规则表一般的论文已经基本给出。因此带入算法之后我们的难度也只是在于调节kp,kd,和适当调节规则表。当然调节的难度会大于普通的PID,因为还要定kp,kd的输出范围,调得不好可能效果并没有普通的PID好。
4. 部分解释
4.1对于部分论文所说的重心法解模糊,其实就是上述方法。公式如下。

式中μ(Zi) * Zi相当于文章上面的(a * b + a * ( 1 - b ) + ( 1 - a ) * ( 1 - b ) ) * ZO + ( 1 - a ) * b * NS,即隶属度乘以隶属度值之和,而μ(Zi)之和就是输出值的隶属度之和,我们已经证明它是等于1的。
Chapter7 模糊自适应整定PID控制
Chapter8 自适应模糊PID(位置式)C语言实现
原文链接:https://blog.csdn.net/qq_30759585/article/details/122382396
一、自适应模糊PID原理
自适应模糊PID 控制系统结构如图所示。控制系统以偏差e和偏差变化率ec作为输入量,利用模糊规则进行模糊推理,输出Δkp,Δki,Δkd。对PID三个参数进行在线分析与调整,而自适应模糊PID 控制器输出u( t) 作用Mosfet开关管上,从而使sepic的输出电压达到要求的实时稳定性。

图 4.2.1 模糊PID结构图
系统采用两输入一输出的模糊控制器的形式,以密度偏差e 和偏差变化率ec 作为模糊控制器的输入量,以PID 参数的修正量Δkp,Δki,Δkd分别为模糊控制器的输出量。其变量、基本论域、模糊子集、模糊论域、量化因子、比例因子如表所示。考虑到论域覆盖范围和灵敏度,并且为了F28027计算简便,各模糊子集采用三角形隶属函数。
表 4.2.1 ΔKp模糊规则表

表4.2.2ΔKi模糊规则表

表4.2.3ΔKd模糊规则表


图4.2.2 隶属度函数
根据已经确立的模糊控制规则和隶属度函数,采用Mamdani推理方法,面积重心法非模糊化。

总结一下,整个模糊自适应PID的运算工程如下所示:

二、代码实现
该工程来自https://github.com/FlameAlpha/fuzzy-pid
某位国内大佬编写,顶礼膜拜。
fuzzy_pid.h
#ifndef _FUZZY_PID_H_
#define _FUZZY_PID_H_
#ifdef __cplusplus
extern "C" {
#endif
#include "math.h"
#include "stdlib.h"
#include "User_Component/mySci/printf.h"
#ifndef bool
#define bool char
#endif
#ifndef false
#define false (char)0
#endif
#ifndef true
#define true (char)1
#endif
// Fuzzy quantity fields
enum quantity_fields
{
qf_small = 5,
qf_middle = 7,
qf_large = 8
};
#define qf_default qf_middle
struct fuzzy
{
unsigned int input_num;
unsigned int output_num;
unsigned int fo_type;
unsigned int *mf_type;
int *mf_params;
unsigned int df_type;
int *rule_base;
float *output;
};
struct PID
{
float kp;
float ki;
float kd;
float delta_kp_max;
float delta_ki_max;
float delta_kd_max;
float delta_kp;
float delta_ki;
float delta_kd;
float error_max;
float delta_error_max;
float last_error;
float current_error;
float intergral;
float intergral_limit;
float dead_zone;
float feed_forward;
float output;
int output_min_value;
int output_middle_value;
int output_max_value;
float linear_adaptive_kp;
struct fuzzy *fuzzy_struct;
};
#define NB -3
#define NM -2
#define NS -1
#define ZO 0
#define PS 1
#define PM 2
#define PB 3
//#define fuzzy_pid_debug_print
//#define fuzzy_pid_dead_zone
//#define fuzzy_pid_integral_limit
//#define fuzzy_pid_rule_base_deep_copy
#define pid_params_count 7
#define torque_mode 1
#define position_mode 2
#define control_mode position_mode
#if control_mode == position_mode
#define max_error 5.0f
#define max_delta_error 5.0f
#else
#define max_error 12.0f
#define max_delta_error 12.0f
#endif
#define min_pwm_output 250
#define middle_pwm_output 1500
#define max_pwm_output 2900
struct fuzzy *fuzzy_init(unsigned int input_num, unsigned int output_num);
void fuzzy_params_init(struct fuzzy *fuzzy_struct, unsigned int mf_type, unsigned int fo_type, unsigned int df_type,
int mf_params[], int rule_base[][qf_default]);
void fuzzy_control(float e, float de, struct fuzzy *fuzzy_struct);
struct PID *raw_fuzzy_pid_init(float kp, float ki, float kd, float integral_limit, float dead_zone,
float feed_forward, float error_max, float delta_error_max, float delta_kp_max,
float delta_ki_max, float delta_kd_max, unsigned int mf_type, unsigned int fo_type,
unsigned int df_type, int *mf_params, int rule_base[][qf_default],
int output_min_value, int output_middle_value, int output_max_value);
//float params[pid_params_count] = {kp, ki, kd, integral_limit, dead_zonefeed_forward, linear_adaptive_kp};
struct PID *fuzzy_pid_init(float *params, float delta_k, unsigned int mf_type, unsigned int fo_type,
unsigned int df_type, int mf_params[], int rule_base[][qf_default]);
struct PID **
fuzzy_pid_vector_init(float params[][pid_params_count], float delta_k, unsigned int mf_type, unsigned int fo_type,
unsigned int df_type, int *mf_params, int rule_base[][qf_default],
unsigned int count);
float fuzzy_pid_control(float real, float idea, struct PID *pid);
int direct_control(int zero_value, int offset_value, bool direct);
int fuzzy_pid_motor_pwd_output(float real, float idea, bool direct, struct PID *pid);
void delete_pid(struct PID *pid);
void delete_pid_vector(struct PID **pid_vector, unsigned int count);
#ifdef __cplusplus
}
#endif
#endif //_FUZZY_PID_H_
fuzzy_pid.c
#include "User_Component/myPID/fuzzy_pid.h"
struct fuzzy *fuzzy_init(unsigned int input_num, unsigned int output_num)
{
struct fuzzy *fuzzy_struct = (struct fuzzy *) malloc(sizeof(struct fuzzy));
fuzzy_struct->input_num = input_num;
fuzzy_struct->output_num = output_num;
fuzzy_struct->mf_type = (unsigned int *) malloc((input_num + output_num) * sizeof(unsigned int));
#ifdef fuzzy_pid_rule_base_deep_copy
fuzzy_struct->mf_params = (int *) malloc(4 * qf_default * sizeof(int));
fuzzy_struct->rule_base = (int *) malloc(output_num * qf_default * qf_default * sizeof(int));
#endif
fuzzy_struct->output = (float *) malloc(output_num * sizeof(float));
return fuzzy_struct;
}
void delete_fuzzy(struct fuzzy *fuzzy_struct)
{
free(fuzzy_struct->mf_type);
free(fuzzy_struct->output);
free(fuzzy_struct);
}
void fuzzy_params_init(struct fuzzy *fuzzy_struct, unsigned int mf_type, unsigned int fo_type, unsigned int df_type,
int mf_params[], int rule_base[][qf_default])
{
for (unsigned int i = 0; i < fuzzy_struct->input_num + fuzzy_struct->output_num; ++i)
{
fuzzy_struct->mf_type[i] = mf_type;
}
for (unsigned int i = 0; i < fuzzy_struct->output_num; ++i)
{
fuzzy_struct->output[i] = 0;
}
#ifdef fuzzy_pid_rule_base_deep_copy
for (unsigned int j = 0; j < 4 * qf_default; ++j)
{
fuzzy_struct->mf_params[j] = mf_params[j];
}
for (unsigned int k = 0; k < fuzzy_struct->output_num * qf_default; ++k)
{
for (unsigned int i = 0; i < qf_default; ++i)
{
fuzzy_struct->rule_base[k * 7 + i] = rule_base[k][i];
}
}
#else
fuzzy_struct->mf_params = mf_params;
fuzzy_struct->rule_base = (int *) rule_base;
#endif
fuzzy_struct->fo_type = fo_type;
fuzzy_struct->df_type = df_type;
}
#define inverse(parameter) 1.0f/(float)parameter
// Gaussian membership function
float gaussmf(float x, float sigma, float c)
{
return expf(-powf(((x - c) / sigma), 2.0f));
}
// Generalized bell-shaped membership function
float gbellmf(float x, float a, float b, float c)
{
return inverse(1.0f + powf(fabsf((x - c) / a), 2.0f * b));
}
// Sigmoidal membership function
float sigmf(float x, float a, float c)
{
return inverse(1.0f + expf(a * (c - x)));
}
// Trapezoidal membership function
float trapmf(float x, float a, float b, float c, float d)
{
if (x >= a && x < b)
return (x - a) / (b - a);
else if (x >= b && x < c)
return 1.0f;
else if (x >= c && x <= d)
return (d - x) / (d - c);
else return 0.0f;
}
// Triangular membership function
float trimf(float x, float a, float b, float c)
{
return trapmf(x, a, b, b, c);
}
// Z-shaped membership function
float zmf(float x, float a, float b)
{
if (x <= a)
return 1.0f;
else if (x >= a && x <= (a + b) / 2.0f)
return 1.0f - 2.0f * powf((x - a) / (b - a), 2.0f);
else if (x >= (a + b) / 2.0f && x < b)
return 2.0f * powf((x - b) / (b - a), 2.0f);
else return 0;
}
// Membership function
float mf(float x, unsigned int mf_type, int *params)
{
switch (mf_type)
{
case 0:
return gaussmf(x, params[0], params[1]);
case 1:
return gbellmf(x, params[0], params[1], params[2]);
case 2:
return sigmf(x, params[0], params[2]);
case 3:
return trapmf(x, params[0], params[1], params[2], params[3]);
case 5:
return zmf(x, params[0], params[1]);
default: // set triangular as default membership function
return trimf(x, params[0], params[1], params[2]);
}
}
// Union operator
float or (float a, float b, unsigned int type)
{
if (type == 1) // algebraic sum
{
return a + b - a * b;
}
else if (type == 2) // bounded sum
{
return fminf(1, a + b);
}
else // fuzzy union
{
return fmaxf(a, b);
}
}
// Intersection operator
float and (float a, float b, unsigned int type)
{
if (type == 1) // algebraic product
{
return a * b;
}
else if (type == 2) // bounded product
{
return fmaxf(0, a + b - 1);
}
else // fuzzy intersection
{
return fminf(a, b);
}
}
// Equilibrium operator
float equilibrium(float a, float b, float params)
{
return powf(a * b, 1 - params) * powf(1 - (1 - a) * (1 - b), params);
}
// Fuzzy operator
float fo(float a, float b, unsigned int type)
{
if (type < 3)
{
return and (a, b, type);
}
else if (type < 6)
{
return or (a, b, type - 3);
}
else
{
return equilibrium(a, b, 0.5f);
}
}
// Mean of centers defuzzifier, only for two input multiple index
void moc(const float *joint_membership, const unsigned int *index, const unsigned int *count, struct fuzzy *fuzzy_struct)
{
float denominator_count = 0;
// float numerator_count[fuzzy_struct->output_num];
//注意 TI的C99编译器并不是完全支持动态数组的特性,所以这里改变了一下(c89写法)
float *numerator_count= (float *)malloc(fuzzy_struct->output_num*sizeof(float));
for (unsigned int l = 0; l < fuzzy_struct->output_num; ++l)
{
numerator_count[l] = 0;
}
for (int i = 0; i < count[0]; ++i)
{
for (int j = 0; j < count[1]; ++j)
{
denominator_count += joint_membership[i * count[1] + j];
}
}
for (unsigned int k = 0; k < fuzzy_struct->output_num; ++k)
{
for (unsigned int i = 0; i < count[0]; ++i)
{
for (unsigned int j = 0; j < count[1]; ++j)
{
numerator_count[k] += joint_membership[i * count[1] + j] *
fuzzy_struct->rule_base[k * qf_default * qf_default + index[i] * qf_default +
index[count[0] + j]];
}
}
}
#ifdef fuzzy_pid_debug_print
printf("output:\n");
#endif
for (unsigned int l = 0; l < fuzzy_struct->output_num; ++l)
{
fuzzy_struct->output[l] = numerator_count[l] / denominator_count;
#ifdef fuzzy_pid_debug_print
printf("%f,%f,%f\n", numerator_count[l], denominator_count, fuzzy_struct->index[l]);
#endif
}
free(numerator_count);//有借有还再借不难
}
// Defuzzifier
void df(const float *joint_membership, const unsigned int *output, const unsigned int *count, struct fuzzy *fuzzy_struct,
int df_type)
{
if (df_type == 0)
moc(joint_membership, output, count, fuzzy_struct);
else
{
printf("Waring: No such of defuzzifier!\n");
moc(joint_membership, output, count, fuzzy_struct);
}
}
void fuzzy_control(float e, float de, struct fuzzy *fuzzy_struct)
{
float membership[qf_default * 2]; // Store membership
unsigned int index[qf_default * 2]; // Store the index of each membership
unsigned int count[2] = {0, 0};
{
int j = 0;
for (int i = 0; i < qf_default; ++i)
{
float temp = mf(e, fuzzy_struct->mf_type[0], fuzzy_struct->mf_params + 4 * i);
// if (temp > 1e-4)
// {
membership[j] = temp;
index[j++] = i;
// }
}
count[0] = j;
for (int i = 0; i < qf_default; ++i)
{
float temp = mf(de, fuzzy_struct->mf_type[1], fuzzy_struct->mf_params + 4 * i);
// if (temp > 1e-4)
// {
membership[j] = temp;
index[j++] = i;
// }
}
count[1] = j - count[0];
}
#ifdef fuzzy_pid_debug_print
printf("membership:\n");
for (unsigned int k = 0; k < j; ++k)
{
printf("%f\n", membership[k]);
}
printf("index:\n");
for (unsigned int k = 0; k < j; ++k)
{
printf("%d\n", index[k]);
}
printf("count:\n");
for (unsigned int k = 0; k < 2; ++k)
{
printf("%d\n", count[k]);
}
#endif
if (count[0] == 0 || count[1] == 0)
{
for (unsigned int l = 0; l < fuzzy_struct->output_num; ++l)
{
fuzzy_struct->output[l] = 0;
}
return;
}
// Joint membership
//注意 TI的C99编译器并不是完全支持动态数组的特性,所以这里改变了一下(c89写法)
// float joint_membership[count[0] * count[1]];
float *joint_membership= (float *)malloc(count[0] * count[1]*sizeof(float));
for (int i = 0; i < count[0]; ++i)
{
for (int j = 0; j < count[1]; ++j)
{
joint_membership[i * count[1] + j] = fo(membership[i], membership[count[0] + j], fuzzy_struct->fo_type);
}
}
df(joint_membership, index, count, fuzzy_struct, 0);
free(joint_membership);
}
struct PID *raw_fuzzy_pid_init(float kp, float ki, float kd, float integral_limit, float dead_zone,
float feed_forward, float error_max, float delta_error_max, float delta_kp_max,
float delta_ki_max, float delta_kd_max, unsigned int mf_type, unsigned int fo_type,
unsigned int df_type, int mf_params[], int rule_base[][qf_default],
int output_min_value, int output_middle_value, int output_max_value)
{
struct PID *pid = (struct PID *) malloc(sizeof(struct PID));
pid->kp = kp;
pid->ki = ki;
pid->kd = kd;
pid->delta_kp_max = delta_kp_max;
pid->delta_ki_max = delta_ki_max;
pid->delta_kd_max = delta_kd_max;
pid->delta_kp = 0;
pid->delta_ki = 0;
pid->delta_kd = 0;
pid->error_max = error_max;
pid->delta_error_max = delta_error_max;
int output_count = 1;
if (ki > 1e-4)
{
output_count += 1;
if (kd > 1e-4)
output_count += 1;
}
pid->fuzzy_struct = fuzzy_init(2, output_count);
fuzzy_params_init(pid->fuzzy_struct, mf_type, fo_type, df_type, mf_params, rule_base);
pid->last_error = 0;
pid->current_error = 0;
pid->intergral = 0;
pid->intergral_limit = integral_limit;
pid->dead_zone = dead_zone;
pid->feed_forward = feed_forward;
pid->output_max_value = output_max_value;
pid->output_middle_value = output_middle_value;
pid->output_min_value = output_min_value;
return pid;
}
struct PID *fuzzy_pid_init(float *params, float delta_k, unsigned int mf_type, unsigned int fo_type,
unsigned int df_type, int mf_params[], int rule_base[][qf_default])
{
return raw_fuzzy_pid_init(params[0], params[1], params[2], params[3], params[4], params[5], max_error,
max_delta_error, params[0] / delta_k, params[1] / delta_k, params[2] / delta_k, mf_type,
fo_type, df_type, mf_params,
rule_base, min_pwm_output, middle_pwm_output, max_pwm_output);
}
int round_user(float parameter)
{
if ((int)(parameter * 10.0) % 10 >= 5)
return parameter + 1;
else
return parameter;
}
int limit(int value, int max_limit, int min_limit)
{
if (value > max_limit)
return max_limit;
if (value < min_limit)
return min_limit;
return value;
}
float limits(float value, float max_limit, float min_limit)
{
if (value > max_limit)
return max_limit;
if (value < min_limit)
return min_limit;
return value;
}
float fuzzy_pid_control(float real, float idea, struct PID *pid)
{
pid->last_error = pid->current_error;
pid->current_error = idea - real;
float delta_error = pid->current_error - pid->last_error;
float uk;
#ifdef fuzzy_pid_dead_zone
if (pid->current_error < pid->dead_zone && pid->current_error > -pid->dead_zone)
{
pid->current_error = 0;
}
else
{
if (pid->current_error > pid->dead_zone)
pid->current_error = pid->current_error - pid->dead_zone;
else
{
if (pid->current_error < -pid->dead_zone)
pid->current_error = pid->current_error + pid->dead_zone;
}
}
#endif
//关键代码
fuzzy_control(pid->current_error / pid->error_max * 3.0f, delta_error / pid->delta_error_max * 3.0f,
pid->fuzzy_struct);
// pid->delta_kp = limits(pid->fuzzy_struct->output[0]/3.0f * pid->delta_kp_max, pid->delta_kp_max ,-pid->delta_kp_max);
pid->delta_kp = limits(pid->fuzzy_struct->output[0], pid->delta_kp_max ,-pid->delta_kp_max);
if (pid->fuzzy_struct->output_num >= 2)
// pid->delta_ki = limits(pid->fuzzy_struct->output[1]/3.0f * pid->delta_ki_max, pid->delta_ki_max ,-pid->delta_ki_max);
pid->delta_ki = limits(pid->fuzzy_struct->output[1], pid->delta_ki_max ,-pid->delta_ki_max);
else pid->delta_ki = 0;
if (pid->fuzzy_struct->output_num >= 3)
// pid->delta_kd =limits(pid->fuzzy_struct->output[2]/3.0f * pid->delta_kd_max, pid->delta_kd_max ,-pid->delta_kd_max);
pid->delta_kd =limits(pid->fuzzy_struct->output[2], pid->delta_kd_max ,-pid->delta_kd_max);
else pid->delta_kd = 0;
#ifdef fuzzy_pid_debug_print
printf("kp : %f, ki : %f, kd : %f\n", pid->kp + pid->delta_kp, pid->ki + pid->delta_ki, pid->kd + pid->delta_kd);
#endif
// printf("kpkikd:%f,%f,%f,%f\n", pid->kp + pid->delta_kp, pid->ki + pid->delta_ki, pid->kd + pid->delta_kd,0.0);
pid->intergral += (pid->ki + pid->delta_ki) * pid->current_error;
#ifdef fuzzy_pid_integral_limit
if (pid->intergral > pid->intergral_limit)
pid->intergral = pid->intergral_limit;
else
{
if (pid->intergral < -pid->intergral_limit)
pid->intergral = -pid->intergral_limit;
}
#endif
// //这里位置式PID算法
// pid->output = (pid->kp + pid->delta_kp) * pid->current_error + pid->intergral +
// (pid->kd + pid->delta_kd) * (pid->current_error - pid->last_error);
uk = (pid->kp + pid->delta_kp) * pid->current_error + pid->intergral +
(pid->kd + pid->delta_kd) * (pid->current_error - pid->last_error);
// pid->output += pid->feed_forward * (float) idea;
uk +=pid->feed_forward * (float) idea;//前馈环节
pid->output = uk;
//限幅
if(pid->output<pid ->output_min_value)
pid->output=pid ->output_min_value;
else if (pid->output>pid ->output_max_value)
pid->output=pid ->output_max_value;
return pid->output;
}
void delete_pid(struct PID *pid)
{
if (pid->fuzzy_struct != NULL)
{
delete_fuzzy(pid->fuzzy_struct);
}
free(pid);
}
void delete_pid_vector(struct PID **pid_vector, unsigned int count)
{
for (unsigned int i = 0; i < count; ++i)
{
delete_pid(pid_vector[i]);
}
free(pid_vector);
}
struct PID **
fuzzy_pid_vector_init(float params[][pid_params_count], float delta_k, unsigned int mf_type, unsigned int fo_type,
unsigned int df_type, int *mf_params, int rule_base[][qf_default],
unsigned int count)
{
struct PID **pid = (struct PID **) malloc(sizeof(struct PID *) * count);
for (unsigned int i = 0; i < count; ++i)
{
pid[i] = fuzzy_pid_init(params[i], delta_k, mf_type, fo_type, df_type, mf_params, rule_base);
}
return pid;
}
int direct_control(int zero_value, int offset_value, bool direct)
{
if (direct == true)
{
return zero_value + offset_value;
}
else
{
return zero_value - offset_value;
}
}
int fuzzy_pid_motor_pwd_output(float real, float idea, bool direct, struct PID *pid)
{
return limit(direct_control(pid->output_middle_value, fuzzy_pid_control(real, idea, pid), direct),
pid->output_max_value, pid->output_min_value);
}
调用方法
//全局变量定义方式
struct PID **pid_vector;
//main函数中初始化
int rule_base[][qf_default] = {
//delta kp rule base
{PB, PB, PM, PM, PS, ZO, ZO},
{PB, PB, PM, PS, PS, ZO, NS},
{PM, PM, PM, PS, ZO, NS, NS},
{PM, PM, PS, ZO, NS, NM, NM},
{PS, PS, ZO, NS, NS, NM, NM},
{PS, ZO, NS, NM, NM, NM, NB},
{ZO, ZO, NM, NM, NM, NB, NB},
//delta ki rule base
{NB, NB, NM, NM, NS, ZO, ZO},
{NB, NB, NM, NS, NS, ZO, ZO},
{NB, NM, NS, NS, ZO, PS, PS},
{NM, NM, NS, ZO, PS, PM, PM},
{NM, NS, ZO, PS, PS, PM, PB},
{ZO, ZO, PS, PS, PM, PB, PB},
{ZO, ZO, PS, PM, PM, PB, PB},
//delta kd rule base
{PS, NS, NB, NB, NB, NM, PS},
{PS, NS, NB, NM, NM, NS, ZO},
{ZO, NS, NM, NM, NS, NS, ZO},
{ZO, NS, NS, NS, NS, NS, ZO},
{ZO, ZO, ZO, ZO, ZO, ZO, ZO},
{PB, PS, PS, PS, PS, PS, PB},
{PB, PM, PM, PM, PS, PS, PB}};
// Default parameters of membership function
int mf_params[4 * qf_default] = {-3, -3, -2, 0,
-3, -2, -1, 0,
-2, -1, 0, 0,
-1, 0, 1, 0,
0, 1, 2, 0,
1, 2, 3, 0,
2, 3, 3, 0};
float fuzzy_pid_params[1][pid_params_count] = {{25.4597502f, 10.0053997f, 15.59500027f, 1800, 0, 0, 1}};
struct PID **subpid_vector = fuzzy_pid_vector_init(fuzzy_pid_params, 4.0f, 4, 1, 0, mf_params, rule_base, 1);
pid_vector=subpid_vector;
//中断中调用
control_uk = fuzzy_pid_control(Voltage_Real, pid.Ref, pid_vector[0]);
if(control_uk<150)
control_uk=150;
else if (control_uk>2800)
control_uk=2800;

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐


 31
31 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)