

STM32 HAL库常用GPIO函数以及外部中断配置与响应流程
HAL库常用GPIO函数以及外部中断配置与响应流程
Hello,大家好,这是我第一篇博客,写的不好请大家包涵指教,话不多说直接看内容:
HAL库常用GPIO函数:
void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init)
![]()
这个函数主要用来初始化我们需要用到的引脚,设置其工作频率、工作模式、上下拉等参数。如果使用CubeMX配置工程,所有参数在Cube中调配,函数自动在工程中生成。
void HAL_GPIO_DeInit(GPIO_TypeDef *GPIOx, uint32_t GPIO_Pin)
HAL_GPIO_Init能够实现对GPIO的初始化,那么HAL_GPIO_DeInit就是与其相反的操作,能够将GPIO口恢复至默认状态,即各个寄存器复位时的值。
GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
![]()
这个函数主要功能是读取我们想要知道的引脚的电平状态、函数返回值为0或1。
void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState)
![]()
该函数是让某个端口输出0或1。
void HAL_GPIO_TogglePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
![]()
该函数的功能是翻转某个端口的电平状态。
HAL_StatusTypeDef HAL_GPIO_LockPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
![]()
该函数的功能是锁住某个端口的电平值,当该端口电平变化时,仍保持原本的值。注意的是:一旦锁住后,就不能再修改,只有复位后才可以重新配置。
论坛某大佬解答:
这是GPIO的模式锁定,根本就不是电平锁定,简单来说就是有个GPIO已经设定为推挽输出模式,只要将该GPIO锁定,后面你的代码执行该GPIO变成输入模式的代码将不起作用,最主要作用是在强干扰环境下防止意外跑飞导致修改io的模式状态导致严重意外问题,只能说一般平常环境是用不上的。
究竟何用待摸索。
void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin)
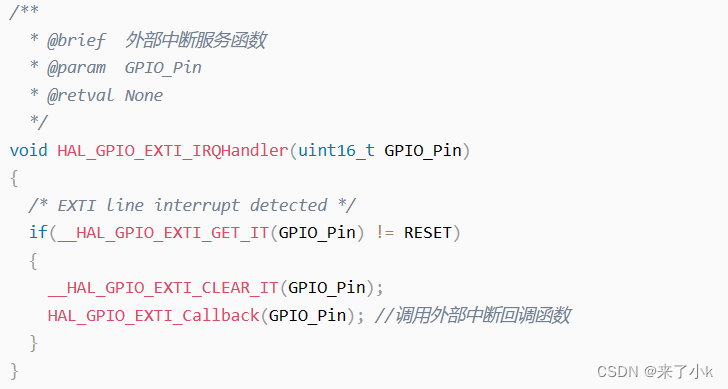
该函数是用来相应外部中断的中断服务函数。(当发生中断的时候,程序就会执行中断服务函数。 每当一个事件发生,就会最终调用相应的中断处理回调函数,我们在回调函数中编写真正的控制逻辑即可。 中断服务函数就是终止程序运行的函数,回调函数是程序在终止之后希望执行的操作)
函数有两个功能:
1.clear IT,即清除中断标记位。
2.调用外部中断回调函数。
__weak void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
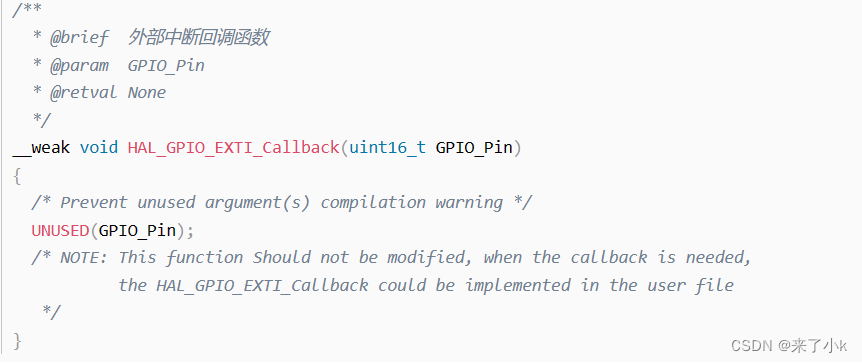
该函数是外部中断的中断回调函数,在函数中写入外部中断触发的内容。
需要注意的是:回调函数定义为弱函数( __weak ),故不需要在stm32l4xx_hal.c中对其进行修改。HAL_GPIO_EXTI_Callback可以在用户文件中实现。
__weak的使用:加上了__weak修饰符的函数,用户可以在用户文件中重新定义一个同名函数,最终编译器编译的时候,会选择用户定义的函数,如果用户没有重新定义这个函数,那么编译器就会执行__weak声明的函数,并且编译器不会报错。所以我们可以在别的地方定义一个相同名字的函数,而不必也尽量不要修改之前的函数。
注意:
使用CubeMX创建外部中断时,中断服务函数和中断回调函数并不会在main函数中直接出现,需要到stm32f1xx_hal_gpio.h中去找到这两个函数。(不是gpio.h,gpio.h是用户文件,而stm32f1xx_hal_gpio.h是库文件)
![]()
然后到.c文件中找到回调函数,并且在其中写用户代码。

但是这样写的话,用户代码就不再main函数以及用户文件夹中了,可以采用以下写法:
由于该回调函数是_weak弱定义,所以我们可以直接在main函数中再定义一个相同的回调函数,并在其中撰写用户代码,这样就解决了上述问题。
其中中断服务函数最后会被stm32f1xx_it.c中的EXIT1_IRQHandler();函数调用。
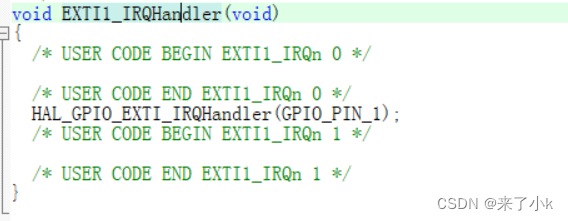
然后接着调用中断回调函数。主要流程就简化为:
EXTI1_IRQHandler();
调用
HAL_GPIO_EXTI_IRQHandler();
调用
HAL_GPIO_EXTI_Callback();
即系统中断服务函数调用HAL库中断处理函数(使用HAL库函数的好处在下文有讲)。
GPIO外部中断执行流程:
1.打开外部中断:
首先是main函数中GPIO初始化函数:
![]()
然后找到gpio.c文件中的MX_GPIO_Init()函数:
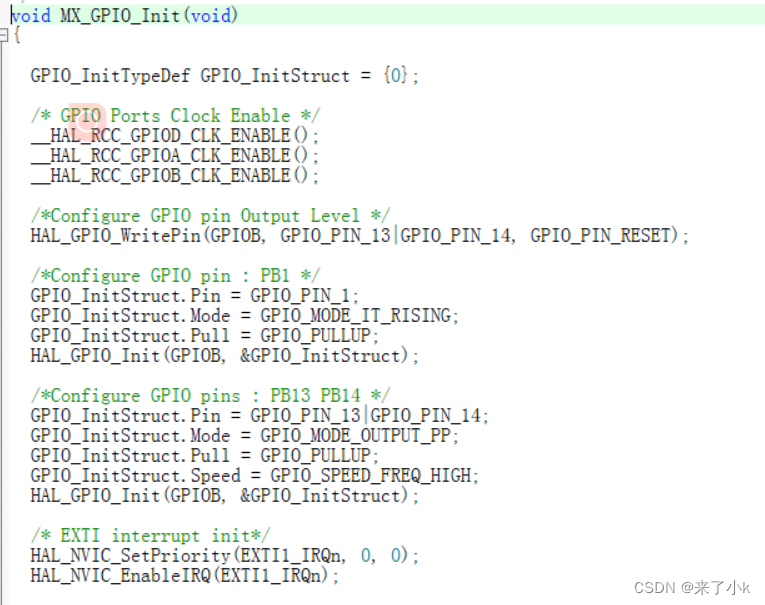
其中HAL_NVIC_SetPriority();是设置中断优先级函数。
HAL_NVIC_EnabledIRQ();是中断开启函数。
外部中断线和引脚的映射配置在下文提及。
在stm32f1xx_hal_cortex.c文件中可找到HAL_NVIC_SetPriority();和HAL_NVIC_EnabledIRQ();函数,但是重点关注HAL_NVIC_EnabledIRQ();函数:
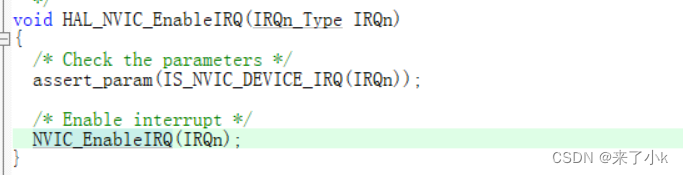
再往下就是寄存器的操作了:(在core_cm3.h文件中)
![]()

2.外部中断响应过程:
当外部中断引脚出现电平变化时,触发外部中断。
微控制器暂停当前程序的执行,根据中断向量表跳转到EXTI1_IRQHandler();函数。
其中中断向量表是在启动文件startup_stm32f103xb.s中由ST公司定义的:
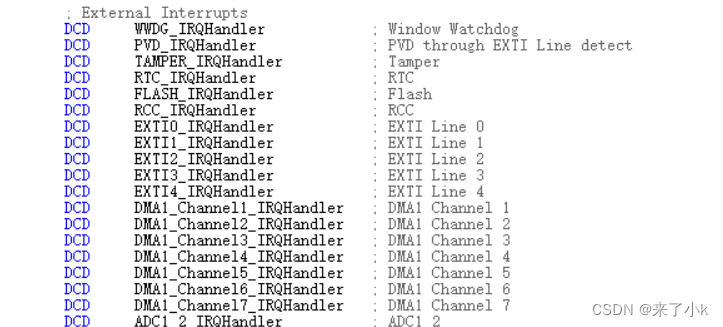
其中由ST公司定义的中断服务函数默认为死循环,但是因为他们的函数属性都是_weak,所以在CubeMX中打开中断后,就会在stm32f1xx_it.c中自动生成同名的中断服务函数EXTI1_IRQHandler();
所以如果没用CubeMX的话,打开中断但是不再次定义中断服务函数,外部中断来临时就会卡死。
接着执行用户编写的中断回调函数,用户需要在main.c文件中重新编写外部中断回调函数HAL_GPIO_EXTI_Callback(),来完成具体的中断处理任务。中断回调函数一般添加在/* USER CODE BEGIN4*/和/* USER CODE END4*/之间。
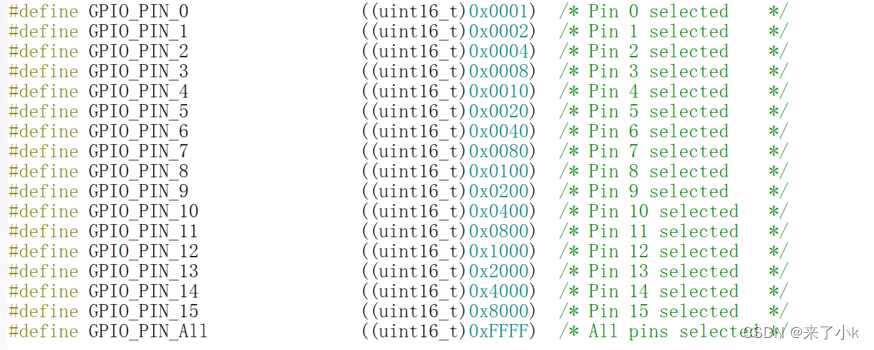
外部中断线0-15 :
给外部中断使用的硬件外部中断线有16个,但是GPIO端口却远不止16个,所以为了解决这个问题,采用了每一个外部中断线控制一组GPIO端口,即尾号相同的引脚作为一组被一条外部中断线控制:
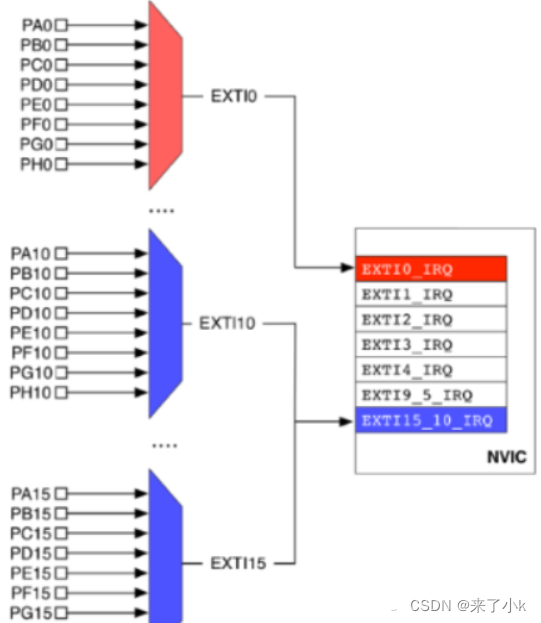
当使用外部中断的时候,通过配置,我们可以将某一组中的某一个引脚连接到外部中断线上。所以一组引脚只能有一个作为外部中断引脚。例如,PA0、PB0、PC0、PD0、PE0、PF0、PG0和PH0这些引脚作为一组,如果我们使用PA0引脚作为外部中断引脚,那么该组的其余引脚就不能作为外部中断引脚使用。因此,从本质上讲,可供用户同时使用的外部中断引脚最多只有16个。
而且虽然外部中断线有16个,但是NVIC只为EXTI提供了7个中断通道,其中EXTI0_IRQ、EXTI1_IRQ、EXTI2_IRQ、EXTI3_IRQ、EXTI4_IRQ分别控制一条外部中断线,EXTI9_5_IRQ控制EXTI5-EXTI9,并且这几条外部中断线共享一个外部中断服务程序,EXTI5_10_IRQ同理。
配置过程:
其实将GPIO引脚和中断线相连的配置,在GPIO配置函数中就有提及:
![]()
IT就表示中断模式。
并且在stm32f1xx_hal_gpio.h中有定义:
![]()
选择好模式后就可以在HAL_GPIO_Init();函数中对外部中断进行配置了:
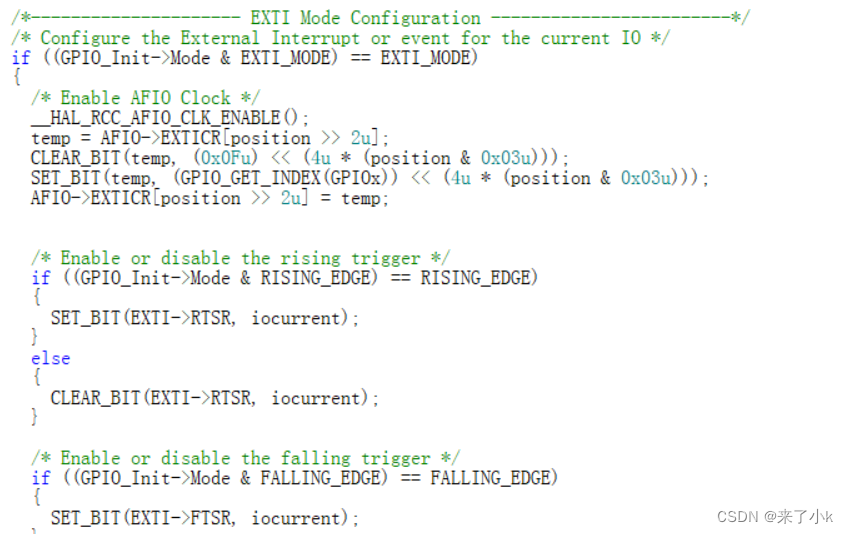
具体配置过程就设计硬件寄存器了,反正通过模式的选择在这里设置了引脚和外部中断线的映射关系。
注意:
初始化了PB1,如果PC1再初始化中断,那么PB1的中断映射将会被清除。
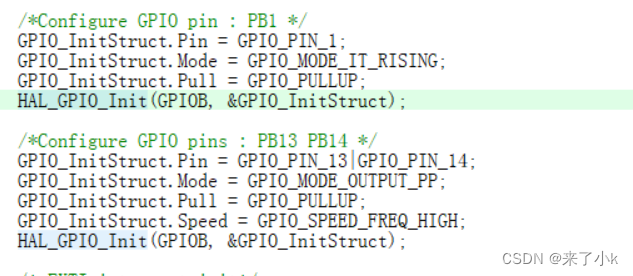
即如果在PB1和PB13、PB14中插入一个模式IT的PC1初始化函数,那么PB1的中断配置就会被覆盖。原因上文提及到,一条中断线只能和一个引脚映射。
调用HAL库中断处理函数的好处以及HAL库函数参数GPIO_PIN_(0-15):
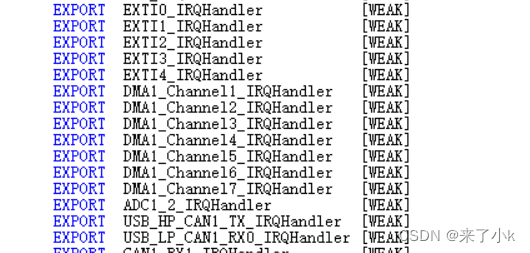
通过NVIC分配到七条中断通道我们可以看到,其实外部中断一共有七个中断服务函数,在启动文件中由ST公司设置:
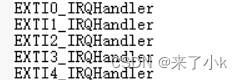
![]()
![]()
其中只有最后两个是多中断线共享一个中断服务函数。
当我们使用多个外部中断时,如果使用0、1、2三个外部中断,那么我们写中断函数,就要在三个中断服务函数中去写,很麻烦。
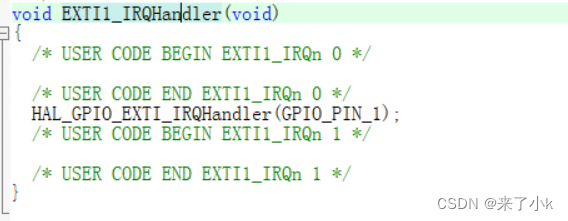
但是使用CubeMX时,就会自动生成中断服务函数,并且自动调用HAL库函数:


可以看到,不论是那条外部中断线,最后都是调用同一个HAL库中断服务函数, 只不过参数,即GPIO_PIN_()有变化,其实该参数仅仅是用来判断外部中断是由哪一条外部中断线产生的,仅此而已。
通过这样的处理,我们不论哪条外部中断线响应了,最后都是调用同一个中断回调函数:
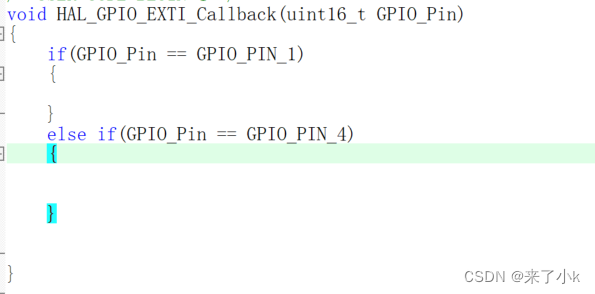
这样,我们只需要在回调函数中判断一下形参GPIO_Pin的值,就可以判断是哪个引脚电平变化导致了中断响应,从而去编写相应的响应代码。

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 6
6 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)