
STM32 HAL库 STM32CubeMX -- PWM(呼吸灯)
STM32 HAL库 STM32Cube MX配置 TIM PWM 代码使用
一、PWM简介
PWM (Pulse Width Modulation)就是对外输出脉宽(即占空比)可调的方波信号,简称脉宽调制;
信号频率由自动重装寄存器ARR 的值决定,占空比由比较寄存器CCR 的值决定。
PWM工作模式
PWM模式1 :
在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为有效电平,否则为无效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为无效电平(OC1REF=0),否则为有效电平(OC1REF=1)。
总结就是:PWM模式1,无论是向上还是向下计数,当计数值小于重装载值是输出有效电平。
PWM模式2 :
在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为无效电平,否则为有效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为有效电平,否则为无效电平。
总结就是:PWM模式2,无论是向上还是向下计数,当计数值大于重装载值是输出有效电平。
在两种模式下TIMx_CNT(计数器当前值)与TIMx_CCR1(捕获/比较值) 只是决定是有效电平还是无效电平,有效电平可以是高电平也可以是低电平
以向上计数图例为例介绍
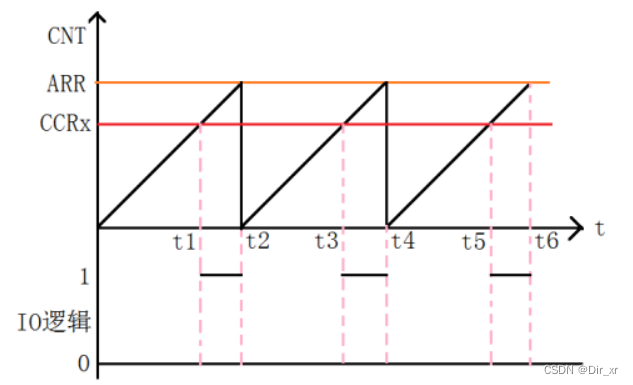
上图中:CNT(计数器当前值)、ARR(自动重装载值)之外,还多了一个值CCRx(捕获/比较寄存器值)
当CNT小于CCRx时,TIMx_CHx通道输出低电平;
当CNT等于或大于CCRx时,TIMx_CHx通道输出高电平。
其中 预分频系数决定了PWM的时钟速度 、ARR(自动重装载值)的大小决定了PWM的周期 、 CRRx(捕获/比较寄存器值)决定了输出有效信号的时间
有效信号: 高电平、低电平
PWM的一个周期:
定时器从0开始向上计数;
0 ~ t1 ,定时器计数器TIMx_CNT值小于CCRx值 ,输出低电平;
t1 ~ t2 ,定时器计数器TIMx_CNT值大于CCRx值,输出高电平;
TIMx_CNT值达到ARR时 ,定时器溢出,重新向上计数;
循环上述过程;
PWM时间计算
PWM周期计算:
Tpwm = ( (ARR + 1) * (PSC + 1) ) / Tclk
ARR 是自动重装载的值
PSC 是预分频系数
Tclk 是对应的时钟频率
示例:Tclk = 72M 、ARR (自动重装载的值)= 9999、PSC (预分频系数)= 7199
Tpwm = ( (ARR + 1) * (PSC + 1) ) / Tclk = (7200*10000) / 72 000 000 = 1s
占空比:
Duty circle = TIM3->CCR1 / ARR (单位:%)
二、STM32Cube MX配置
基本配置可以参考:STM32 CubeMx教程 – 基础知识及配置使用教程
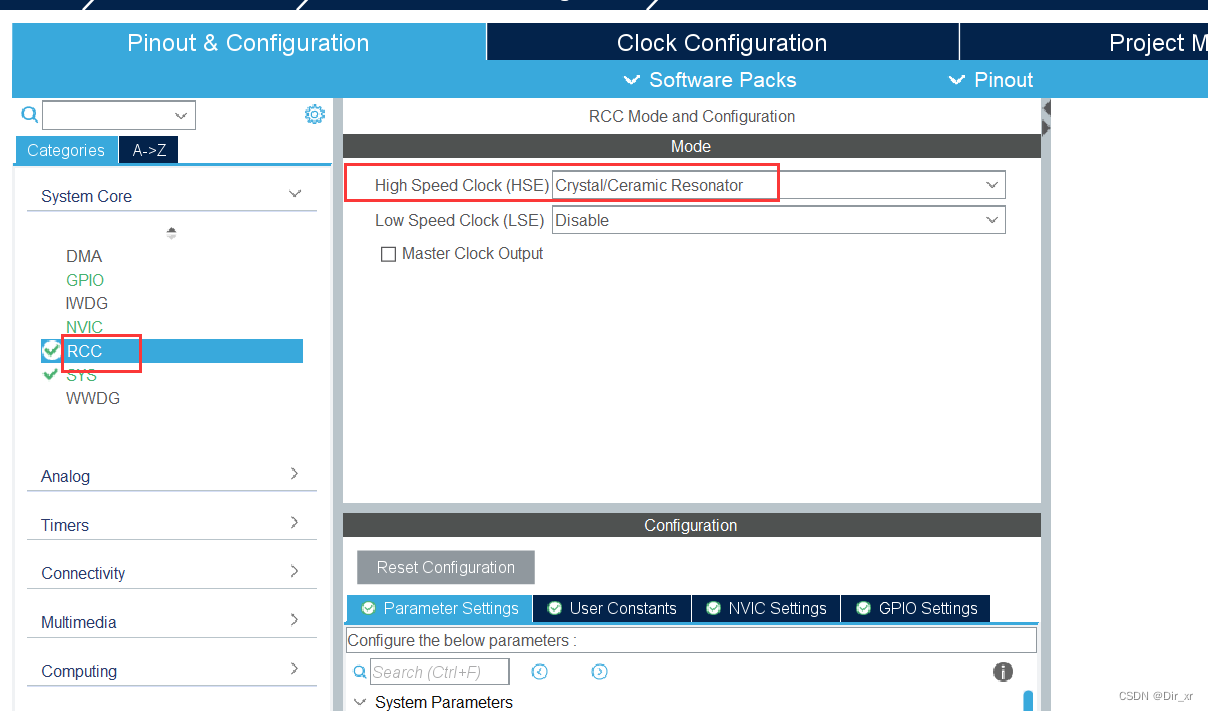
配置RCC,配置为外部晶振模式
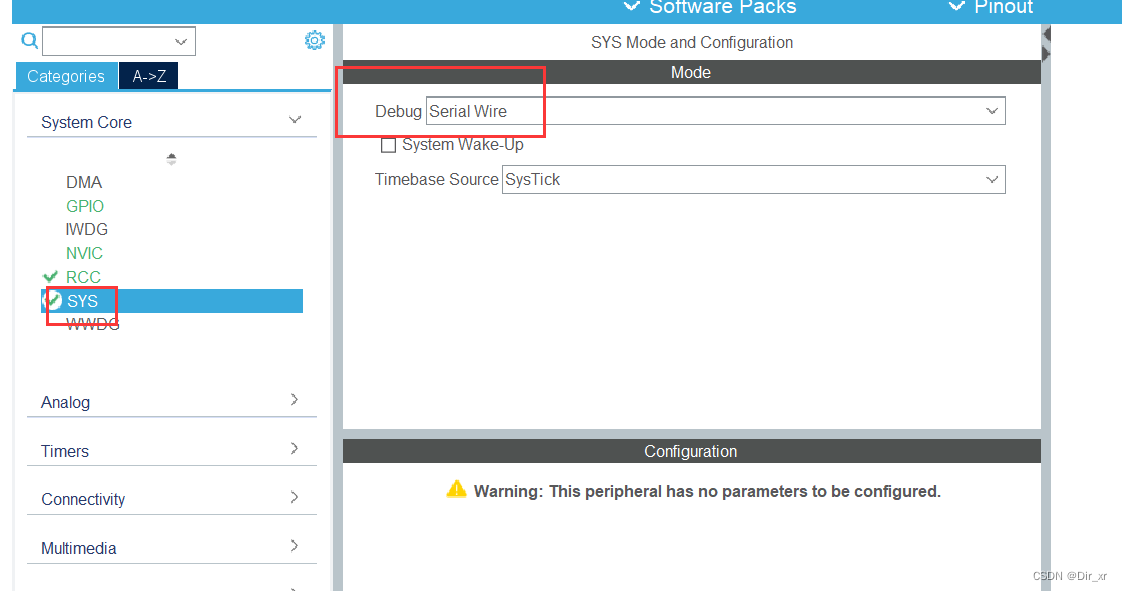
配置SYS ,Debug为Serial Wire
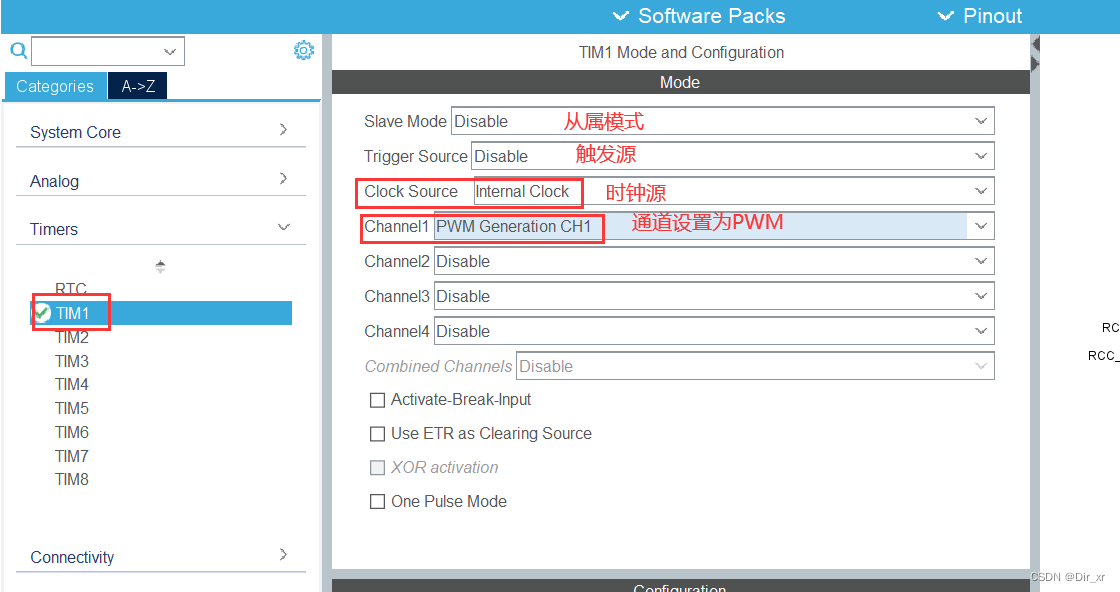
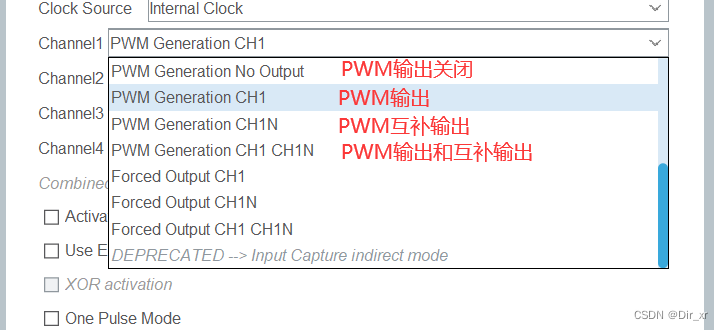
配置TIM,设置为内部时钟,选择通道一为PWM输出模式,正好对应到PA8,用于输出呼吸灯
配置PWM的具体参数,预分频系数为 71,自动重装载值为 499,定时器溢出频率,即PWM的周期,就是 72MHz/(71+1)/(499+1) = 2kHz
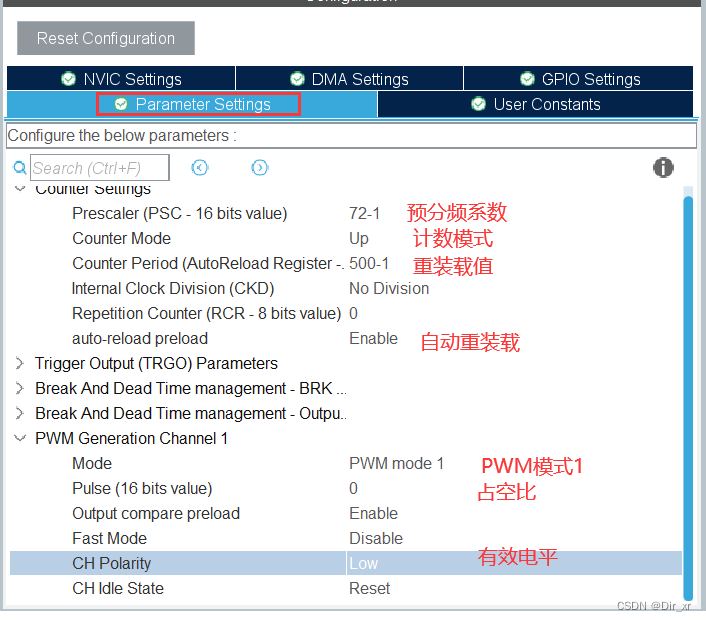
Mode: PWM模式1或模式2
Pulse: 占空比;对应捕获/比较寄存器2(TIMx_CCR2)中的CCR2[15:0]。
Output compare preload: 输出自动比较;对应捕获/比较模式寄存器1中的OC2PE位。输出比较2预装载使能
Fast Mode: PWM脉冲快速输出;对应捕获/比较模式寄存器1中的OC2FE位。输出比较2快速使能。
CH Polarity: 有效电平;对应捕获/比较使能寄存器(TIMx_CCER)中的CC2P位。定义输出极性。
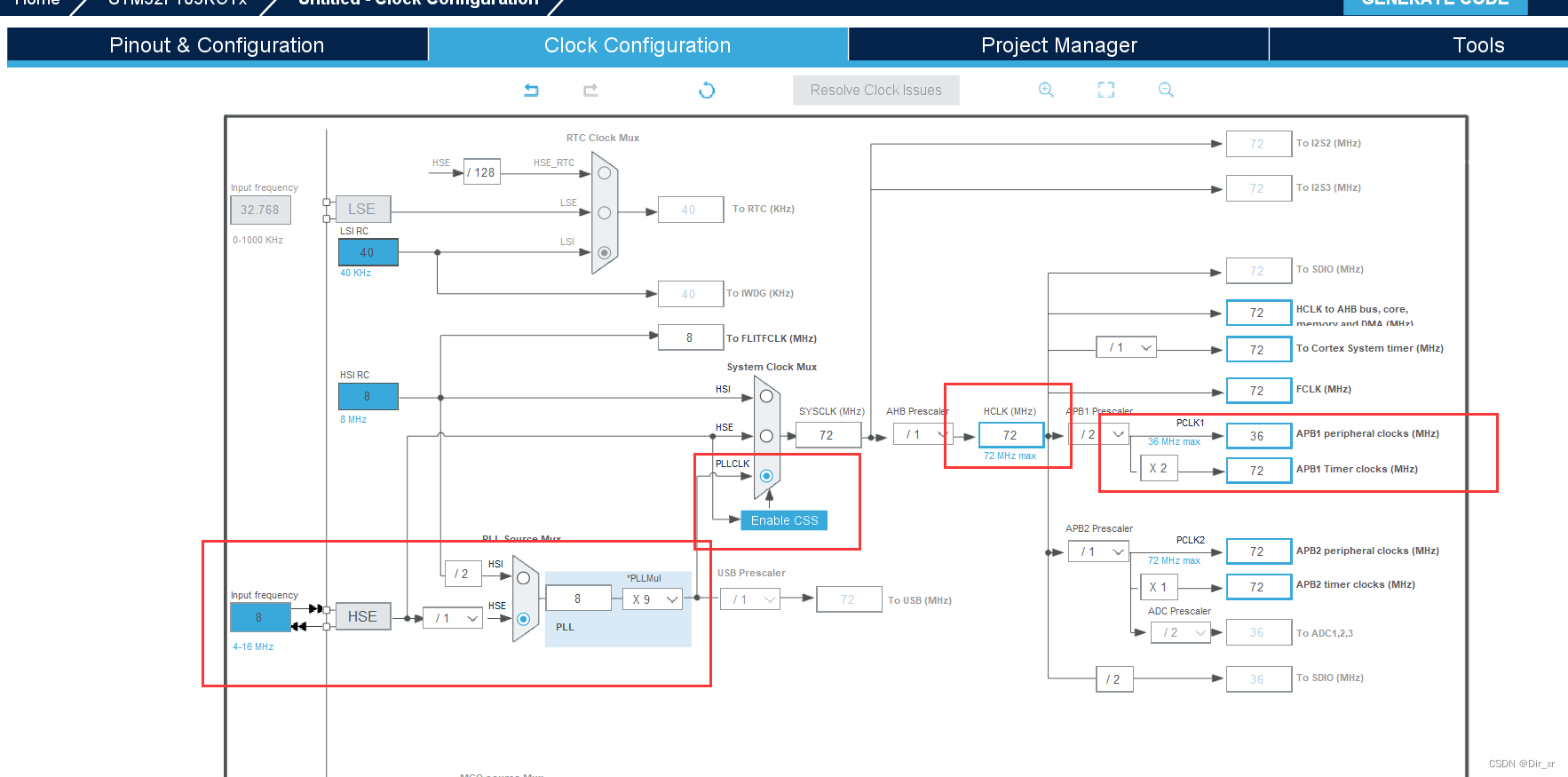
配置时钟树
三、代码详解
涉及到的HAL库函数:
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1); //开启PWM输出
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1,50); //设置默认的占空比值
代码示例:
int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t pwm_value=0; //PWM占空比
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM1_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1); //使能TIM1的PWM Channel1 输出
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
while (pwm_value < 500)
{
pwm_value++;
__HAL_TIM_SetCompare(&htim1, TIM_CHANNEL_1, pwm_value); //修改比较值,修改占空比
// TIM1->CCR1 = pwm_value; //与上方作用相同,直接修改寄存器
HAL_Delay(1);
}
while (pwm_value)
{
pwm_value--;
__HAL_TIM_SetCompare(&htim1, TIM_CHANNEL_1, pwm_value); //修改比较值,修改占空比
// TIM1->CCR1 = pwmVal; //与上方作用相同,直接修改寄存器
HAL_Delay(1);
}
HAL_Delay(200);
}
/* USER CODE END 3 */
}
附录
本文涉及到的代码:STM32 HAL库 PWM例程

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 26
26 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)