
小白入门STM32(2)---控制SG90舵机---基础工作原理详解
小白级入门教程,保姆教程,小白也能看懂。
文章目录
序言
本人一枚软件编程人员,有一定C语言基础,目前自学STM32单片机,写下此篇一巩固所学二交流分享。
按照惯例,先介绍理论再实战上手,穿插习题,最后给出我的愚见。
SG90属于一种舵机,最适合小白入门,可直接由单片机驱动。另外,单片机中给我们封装了很多东西,所以有些地方,读者只要记住就好,不理解的地方,不要寻根究底,你就默认单片机底层给你实现了某项功能就好,不用在意其实现基础细节原理。
这篇理论讲的很浅显,是为了让大家容易看懂。
一、基础理论
1.1 舵机控制原理–PWM
舵机一般可以再0-180度或0-360度转动任意角度,经常用于小车小船转向控制和机械臂的关节等。舵机的转动角度范围不是固定的,请购买时问问商家,到底是哪个范围的。实际使用中,我们对舵机有两个基本需求:
- 舵机转动一定角度。
- 舵机转动时,控制者要求舵机转到一个新的角度。
机器如何给舵机发送其转动角度呢?首先,要低成本,信号线要少。其次,要满足任意角度和中途打断。设计者推出了一个简单的方法:用一个时长为20ms的信号去控制舵机,信号的前一段为高电平,持续时间0.5ms到2.5ms,代表转动角度0-180或者360度,后半段为低电平,这就是PWM信号,具体如下图:
容易看出来,PWM信号利用前段为高电平持续时间控制旋转角度,本质用占空比控制了旋转角度。
运转时,舵机转到你指定的角度需要一定的时间,转动的角度越大,需要的时间越久,所以你可能需要等待一定的时间。如果你刚刚给舵机发送指令转到180度,紧接着又发送指令转到90度,舵机会不转到180度再转到90度,而是在接受到信号时直接在当前的角度直接转到90度去。
习题
习题110. 如果2.5ms为90度,那么36度的PWM信号是高电平时间长度是?
习题111. 为什么是PWM控制舵机,有没有其他的方法?
习题112. PWM信号属于串行还是并行通信?全工还是单工?为什么要这么设计?
习题113. PWM信号长度为20ms,为什么一般只用前2.5ms?
1.2 定时器
为什么要讲解定时器,要用它去产生PWM信号。
1.2.1 基础定时器
定时器,顾名思义,按照定下闹钟到了某个时刻做某件事情。比如,你定下闹钟早上6点起床跑步,或者每隔半个小时喝一次水。你也可以给机器制作一个闹钟,每隔半秒二极管发光或者熄灭,或者每隔4秒灯亮起来再过4秒灯熄灭。
为了达成“每隔4秒二极管亮起来再过4秒二极管熄灭”,咱们构造一套定时器系统,它也许很奇怪,设计的有些复杂,但是还请你压制疑问,跟我一起把它造出来。
- 咱们构造一个时钟装置,每过20ms,它响一次,也就是它将1秒切成50份,每份长20ms。(为什么要造这么一个时钟呢,这是因为单片机的时钟就是这种时钟,将1秒切成n份)
- 为了能够实现间隔4秒,咱们再做一个循环计数装置:每当时钟响1次,它的数值加一,但是智商有限,只知道0-199,到了199后再加一,数值归为0。
- 最后做一个开关装置,当计数装置数字为199时开关就反转一次,灯亮或者熄灭。
动画效果如下:
在上述的过程中,我们就利用制作了一个套装置,其中时钟是现实世界的时间源,循环计数装置提供实际需要的循环固定间隔,它们两个组成一个完整的简陋定时器,与单片机的基础定时器基本功能一致,下面正式介绍他们。
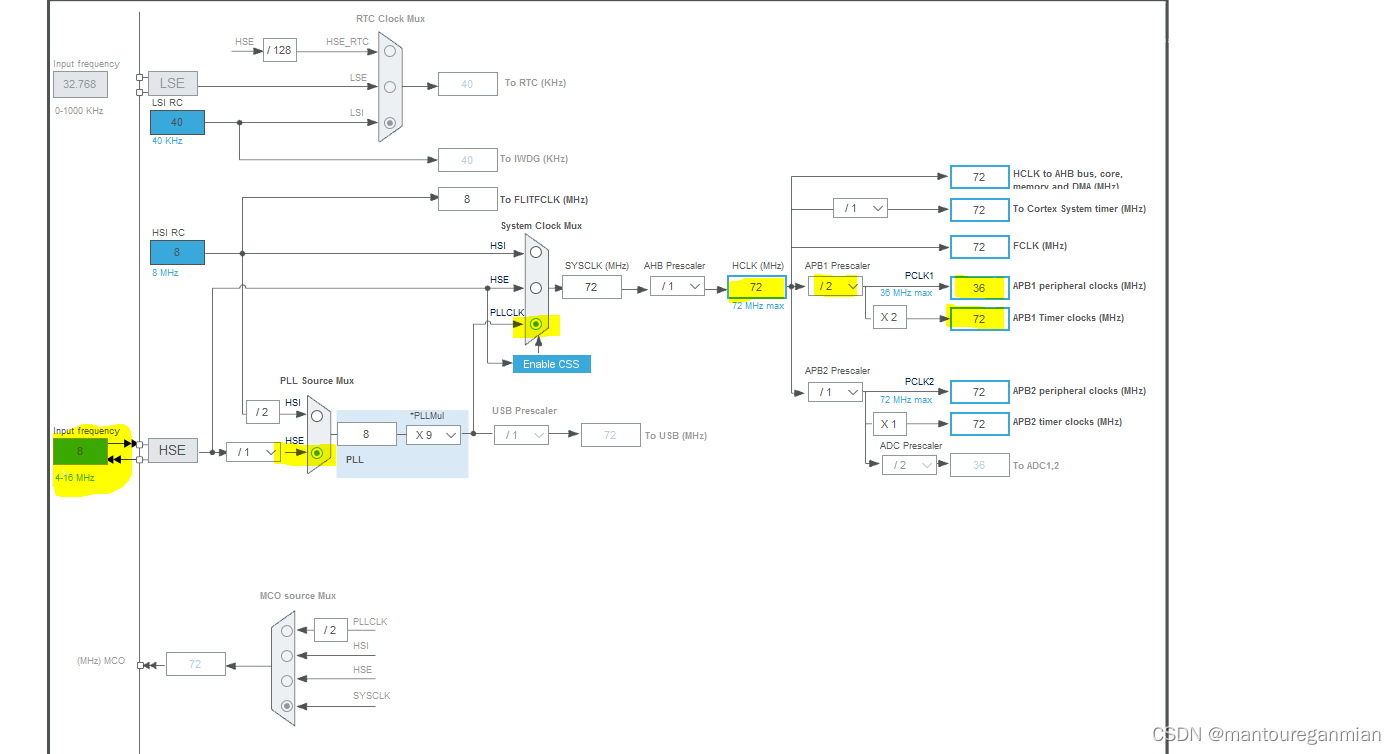
时钟装置
时钟装置:一般是STM32单片机的系统时钟,用变量sys_tck表示,频率72MHz,即将1秒分为7200万份,显然太细,频率太高了,需要降低频率,将原来的频率切分为原来的n分之一,即
72
,
000
,
000
n
\frac{72,000,000}{n}
n72,000,000,术语叫做分频。如果采用720分频,即将原来72M频率除以720,即0.1MHz,每份约0.01ms。STM32单片机允许的最大分频数为65536,其为uint16类型数字,这个分频数其实是一个寄存器。
循环计数器
循环计数器:由一些寄存器构成。最重要的两个:
- 计数寄存器CK_CNT,可以存储一个uint16数字,时钟前进一下,其数值自动加一或减一。
- 自动重载寄存器ARR,当CK_CNT大于ARR时,CK_CNT会自动变化,重新循环计数。如果你会设置中断的话,当CK_CNT>ARR时,会触发一个中断。
循环计数器有三种模式:
| 模式名 | 解释 | 图像表示 |
|---|---|---|
| 向上计数 | 计数是自动加一,CK_CNT从0增长到ARR |  |
| 向下计数 | 计数是自动减一,CK_CNT从ARR减小到0 | 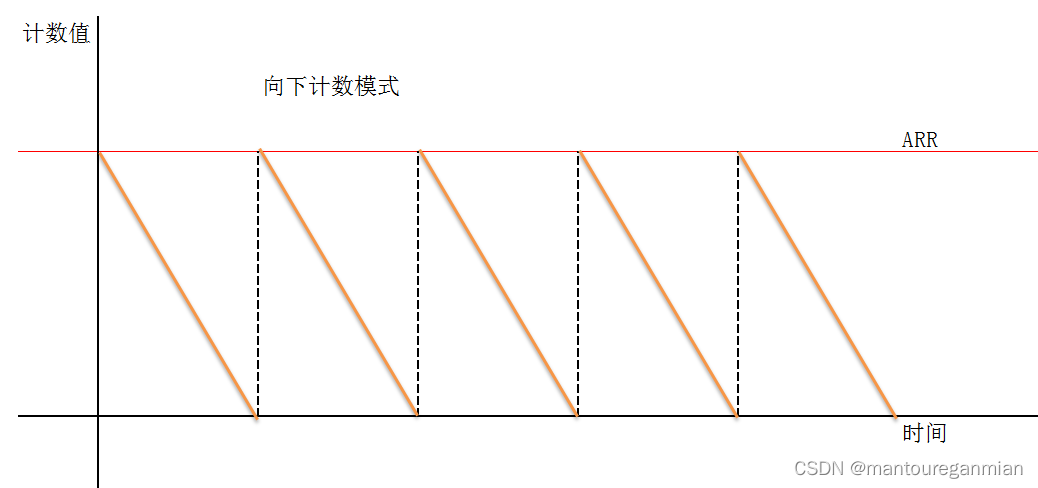 |
| 中心对齐 | 计数是先自动加一,再自动减一,CK_CNT先从0加到ARR然后再减到0 | 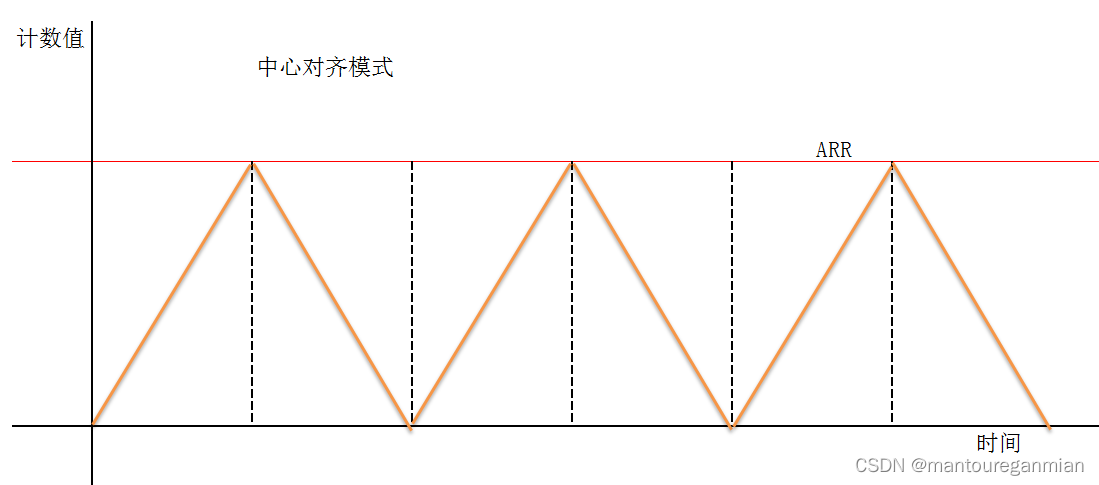 |
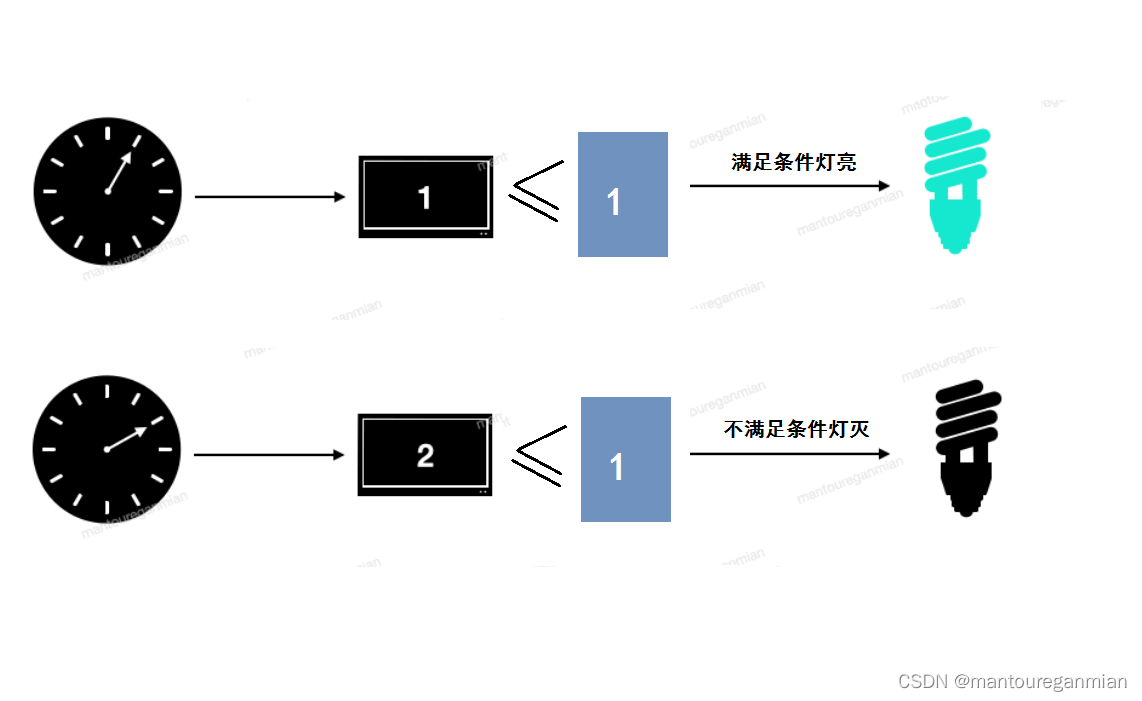
1.2.2 比较定时器
只有基础时钟是无法产生PWM信号的,因为它只能提供循环固定间隔,不能将间隔分为前半段和后半段,进而产生PWM。为了做到这点,需要给循环计数器加一个比较数字CCR,当计数器的值更新时,与CCR比较,并对外输出比较的结果,以方便做其他动作。
接上面灯泡明亮的例子,我们改成灯泡在一秒亮三秒灭的模式。我们只需要在上述提到的理想装置中再加一个比较数字就好:
CCR在STM32中是叫做比较寄存器,是循环计数器的第三个重要的寄存器。是STM32高级定时器才有的功能。
习题
习题121. 定时器的时钟装置,循环计数器各发挥了什么作用,请谈谈您的理解?
习题122. 循环计数器有哪些重要参数要设置?
习题123. STM32时钟频率为72MHz,分频数为uint16,CK_CNT为uint16,则最大循环时间间隔为多久时间?最小呢?
习题124. 如果要产生一个旋转360度的PWM信号,请设置时钟装置和循环计数器的寄存器值?
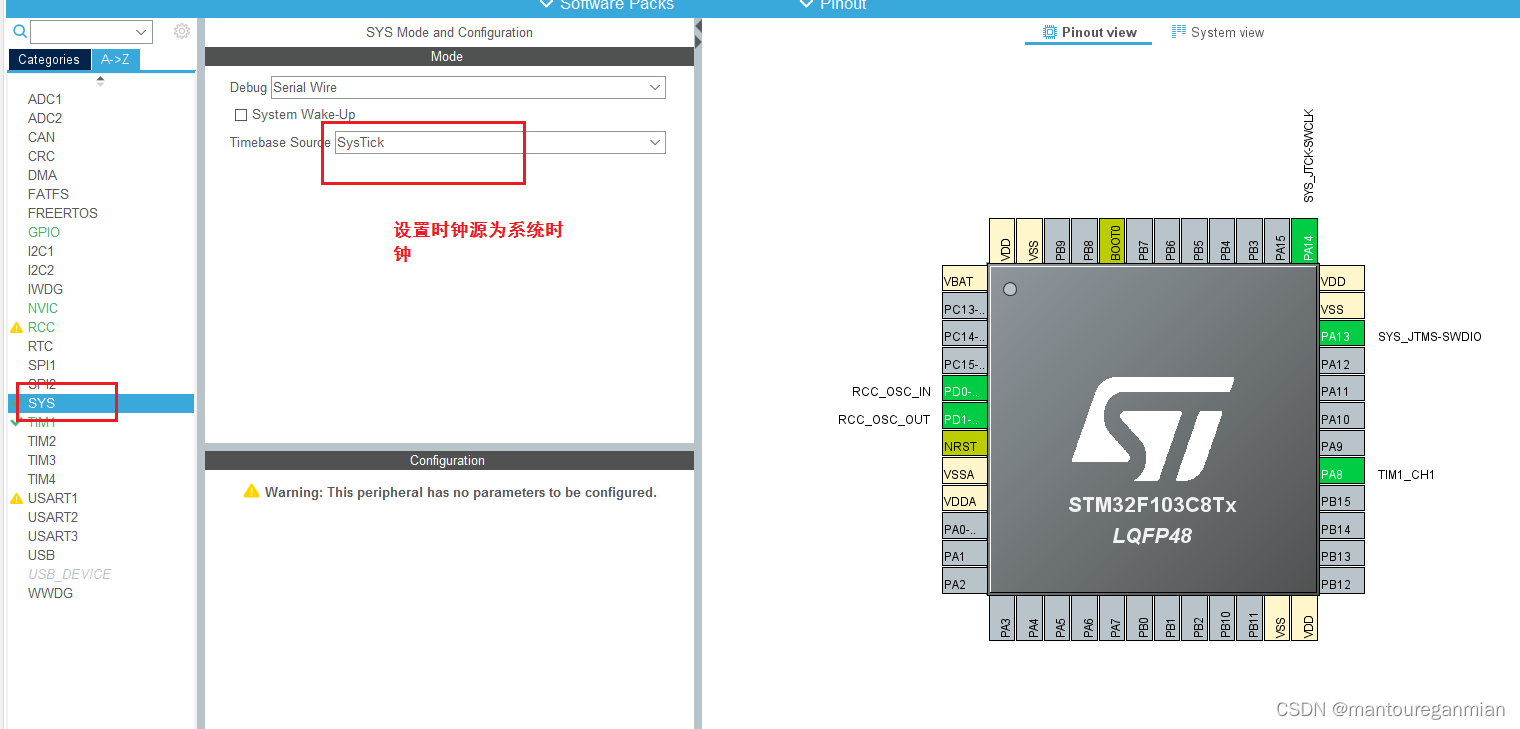
二、实战上手
STM32已经为我们在硬件上封装好了上述的提到的:时钟装置、循环计数器和对外输出装置,以及计数器的自动比较等功能,你我现阶段无需关心其细节。我们只需要对这些东西进行相关设置和接线就好。
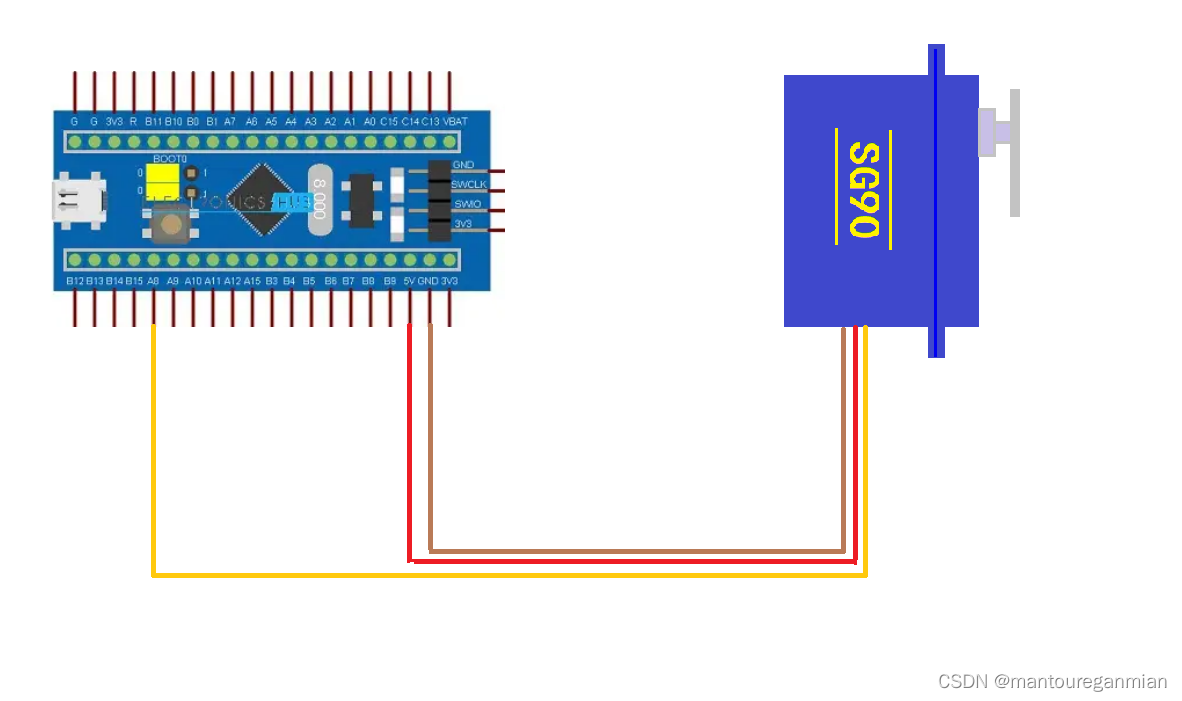
2.1 设置定时器和单片机接线

习题
习题211: 为什么Counter Period是这里为1999,而不是2000?
2.2 代码
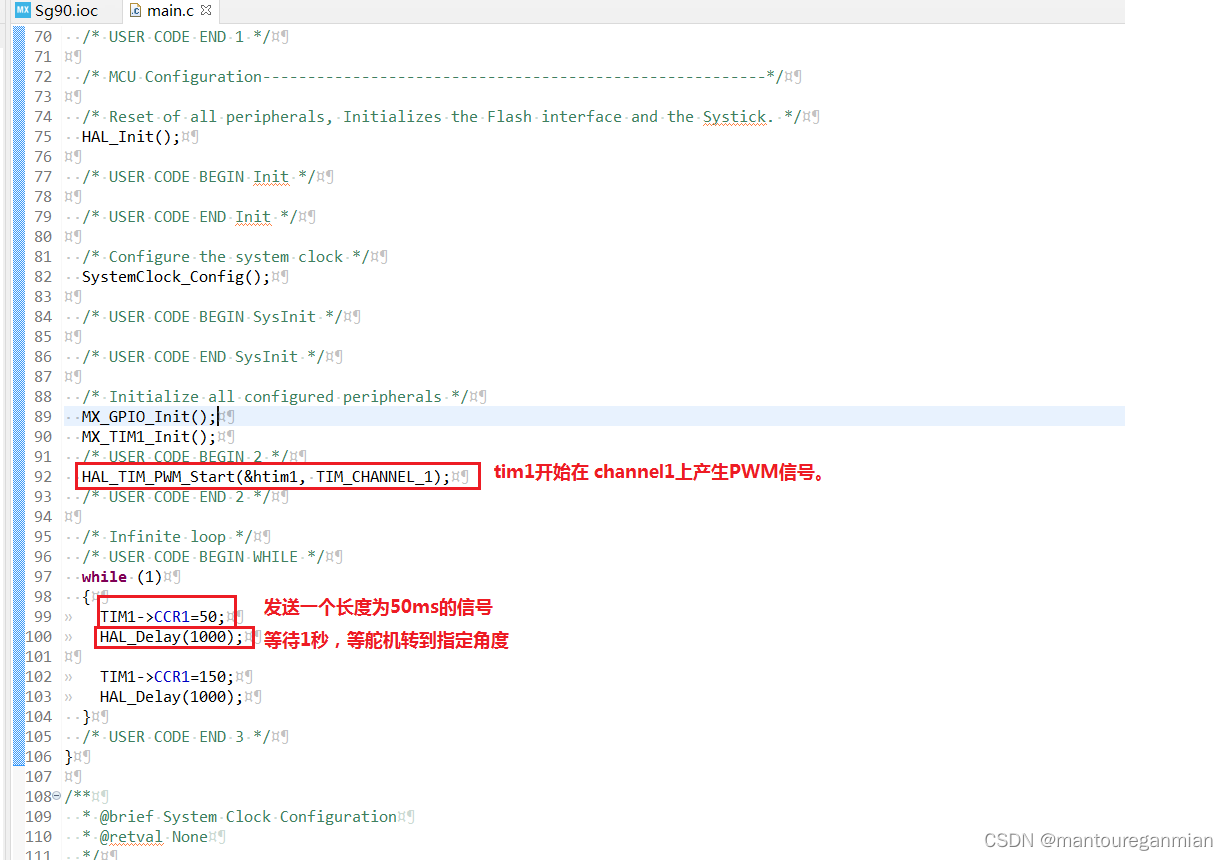
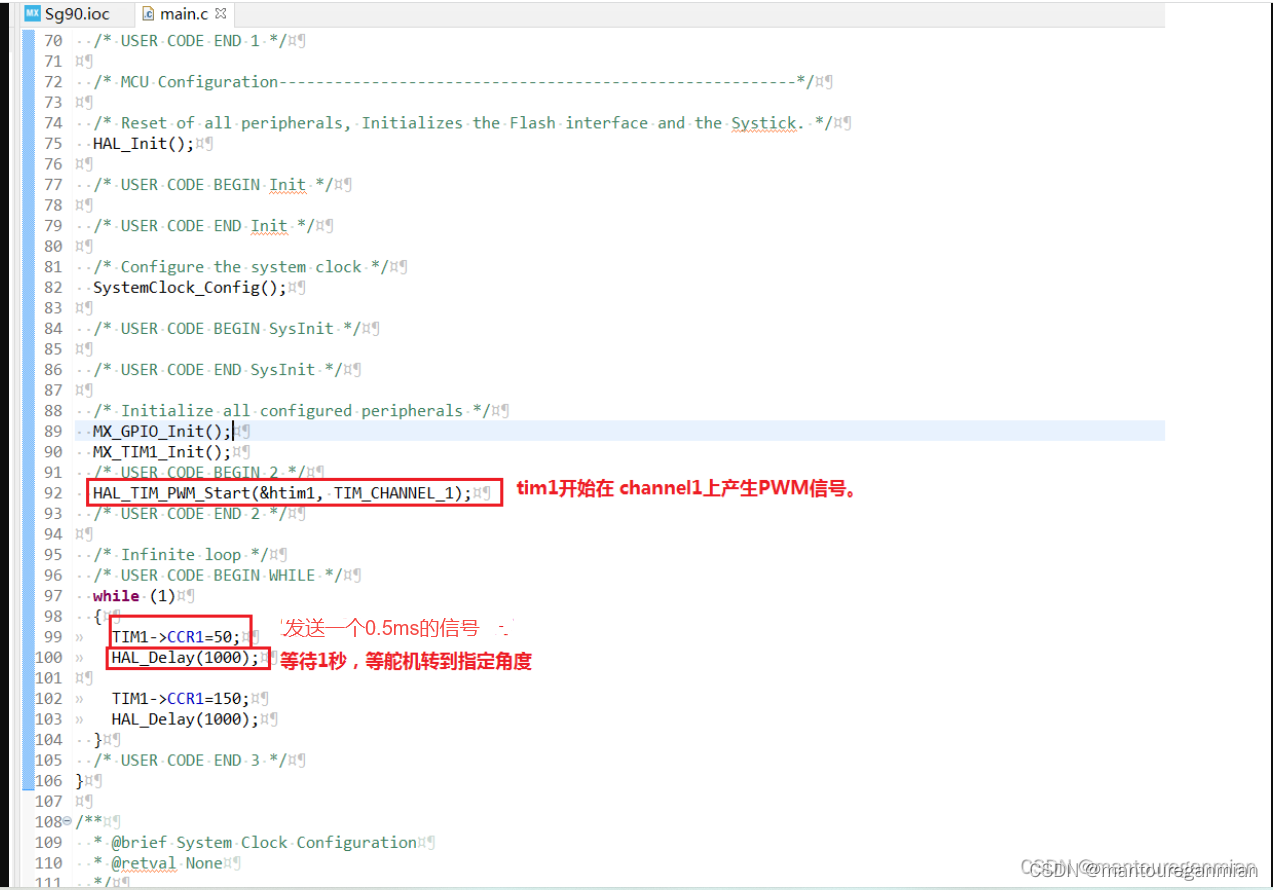
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
TIM1->CCR1=50;
HAL_Delay(1000);
TIM1->CCR1=150;
HAL_Delay(1000);
}
/* USER CODE END 3 */
}
三、习题答案
习题110. 如果2.5ms为90度,那么36度的PWM信号是高电平时间长度是?
- PWM信号最短0.5ms(对应0度),最长2.5ms(对应90度),所以:(2.5 - 0.5) / 90 * 36 + 0.5 = 1.3ms。
习题111. 为什么是PWM控制舵机,有没有其他的方法?
- PWM将用时间长度表示转动角度,在硬件支持的情况下,该协议能够满足不同精度的细分转动角度。只用了一根导线来传输信号,相对价格便宜,好用。
- 可能有。
习题112. PWM信号属于串行还是并行通信?全工还是单工?为什么要这么设计?
- 一根导线,所以是串行。舵机是信息接收端,不会发信息给另一端,所以是单工。
- 很显然,一根导线很便宜,PWM机制很可靠,执行端不用发信息给信号源端。
习题113. PWM信号长度为20ms,为什么一般只用前2.5ms?
- 2.5ms为20ms的八分之一,利用率确实不高,我不知道确切原因。我的猜想是:空余出来的17.5ms,足够让执行端区分出线路上的杂音信号,并准备好接收下一次的pwm信号。
习题121. 定时器的时钟装置,循环计数器各发挥了什么作用,请谈谈您的理解?
- 定时器一般会循环执行某一操作。时钟装置提供了现实世界中的时间粒度,循环计数器记录一次循环中已经流失的时间以方便在特定的时刻,执行特定的操作。
习题122. 循环计数器有哪些重要参数要设置?
- 循环周期长度,即一个轮回的长度。
习题123. STM32时钟频率为72MHz,分频数为uint16,CK_CNT为uint16,则最大循环时间间隔为多久时间?最小呢?
- uint16的值为0~65536,则分频后的时钟频率为 72 65536 \frac{72}{65536} 6553672 ~ 72 MHZ,即时钟间隔范围为1.38e-07~0.00910秒。
- CK_CNT为uint16,则ARR为1~65536。
- 最小循环时间间隔为1.38e-07s x 1 = 1.38e-07s。最小循环时间间隔为65536s*0.00910 = 596.3776s。
习题124. 如果要产生一个旋转360度的PWM信号,请设置时钟装置和循环计数器的寄存器值?
- 360度对应时间为2.5ms,

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 79
79 1
1- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)