
【Linux】SocketCAN设备调试与开发(模拟器)
大家都知道,车辆底盘系统是通过CAN进行通信的,而常见的有USB-CAN和SocketCAN两种,前者是通过USB口接入PC的,代表的有周立功、创芯等(较便宜),后者是通过网口接入PC的,代表的有Kvaser。USB-CAN一般Windows端的资料会多些,有做好的上位机和Qt、C#、MATLAB等二次开发接口,但Linux的支持只有一个测试样例,需要自己去写;
大家都知道,车辆底盘系统是通过CAN进行通信的,而常见的有USB-CAN和SocketCAN两种,前者是通过USB口接入PC的,代表的有周立功、创芯等(较便宜),后者是通过网口接入PC的,代表的有Kvaser。
USB-CAN一般Windows端的资料会多些,有做好的上位机和Qt、C#、MATLAB等二次开发接口,但Linux的支持只有一个测试样例,需要自己去写;SocketCAN对全平台支持都很好,除了Windows的丰富资料外,在Linux端只需安装net-tools和SocketCAN驱动,然后就可以使用utils的命令去控制。
CAN认识
CAN 是控制器局域网络(Controller Area Network)的简称,是实现汽车所有或部分部件之间通信的中枢神经系统,由以研发和生产汽车电子产品著称的德国 BOSCH 公司开发并最终成为国际标准(ISO 11898),是国际上应用最广泛的现场总线之一。在使用 CAN 作为车内通信系统之前,汽车制造商使用的是点对点布线系统,当汽车内部电子单元越来越多时,这种布线系统会显得特别庞大且维护成本太高,后来通过使用 CAN 来解决这个问题。
CAN 总线可以被认为是一个嘈杂、拥挤、慢速版的以太网局域网,只是流量是 UDP 而不是 TCP。值得注意的是,并不是所有的汽车控制系统都使用 CAN,而且 CAN 不仅仅是汽车系统中使用的通信协议,还可能有其它协议,如蓝牙、LIN、MOST、FlexRay等。在实际场景中,CAN 并不是唯一的攻击面,可能还存在很多其它的攻击面。
ICSim总线设备模拟器
参考了这篇,补充完善一些内容。
对于没有SocketCAN设备的童鞋来说,ICSim为我们研究开发提供了一种可能,同时可以练习can-utils操作,另外,使用模拟器可以隔离硬件环境,防止硬件受损。
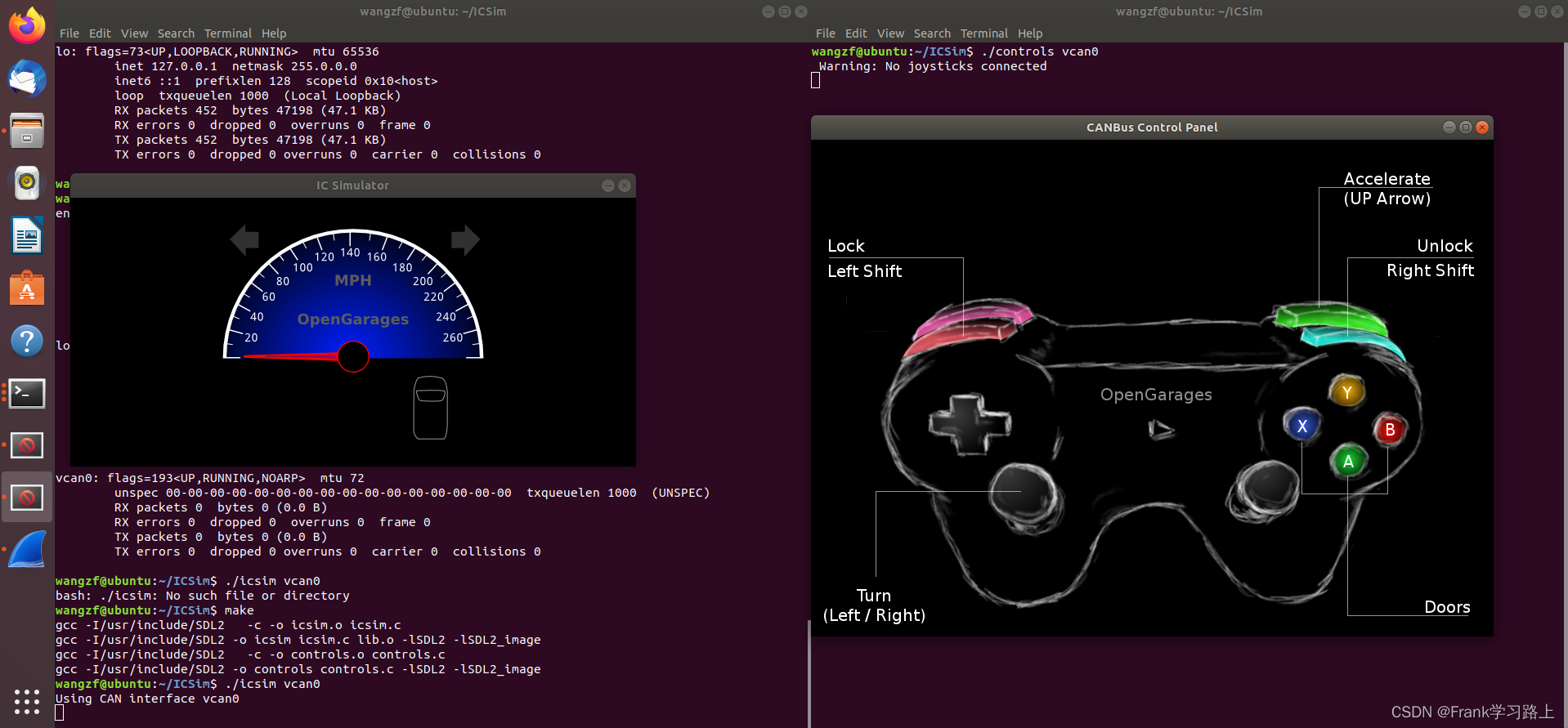
简单来说,ICSim(Instrument Cluster Simulator for SocketCAN)是一个开源的车辆仪表模拟器,该模拟器包含controls和ICSim两个模块,其中controls负责生成模拟的车辆数据,以CAN报文的方式发送给虚拟的CAN接口,ICSim从虚拟CAN接口(vcan0)读取CAN报文,并在仪表上更新对应零件的状态,如车速、转向、车门状态等等。
ICSim安装:
sudo apt-get install libsdl2-dev libsdl2-image-dev can-utils
git clone https://github.com/zombieCraig/ICSim.git
ICSim配置和编译:
./setup_vcan.sh
make
配置完后会生成两个可执行文件:

ICSim启动:
./icsim vcan0
./controls vcan0
会生成汽车模拟仪表盘和控制面板:

车门测试
车门状态报文一直在定时发送,但每当按下一次开门按钮,报文中的数据(DATA)会发生一次变化。通过变化找到CAN报文(CAN逆向)。
转向灯测试
转向灯报文也是一直在定时发送,当按下按钮,报文发生一次变化。通过变化找到CAN报文(CAN逆向)。
实车CAN测试
通过OBD接口测试。
CAN-Utils
Linux 内核中内置了 SocketCAN、can-utils、vcan等工具链,作用是发送和接收 CAN 数据,对数据进行编码或解码。
can-utils 是一套 Linux 特有的实用工具,它可以让 Linux 与车辆上的 CAN 网络进行通信,为了发送、接收和分析 CAN 数据包,需要安装 CAN utils:
sudo apt-get install can-utils
canutils 主要包括 5 个常用的工具:
- cansniffer 用于嗅探数据包(只显示正在变化的报文)(cansniffer -c can0)
- cansend 发送一条报文数据(cansend can0 0C9#8021C0071B101000)
- candump 转储所有接收的数据包(candump can0)
- canplayer 重播 CAN 数据包
- cangen 随机生成 CAN 数据包
回环测试(自发自收):
candump can0&
cansend can0 123#0011223344556677
在实车中,将CAN设备插入汽车的OBD-II端口和计算机的USB端口。在Linux提示符中运行以下命令启动CAN接口:
sudo ip link set can0 up type can bitrate 500000
这将以500 kbps的比特率打开can0接口(如果你只有一个设备连接,总是can0),这是标准的。
Linux通过SocketCAN在内核中内置CAN支持,使得编写自己的附加程序变得很容易。你可以与can总线交互,就像你与任何其他网络交互一样,即通过套接字socket。
Wireshark
Wireshark是一个网络测试工具,支持Linux。安装启动如下:
sudo apt-get install wireshark
sudo wireshark
启动后,可以读取对应网卡:

SavvyCAN
前面介绍了can-utils和wireshark,下面介绍一种更加专业、好用的CAN分析工具。
SavvyCAN 是一个 CAN 总线逆向和捕获工具提供了更多额外的功能,它除了能够轻轻的浏览、过滤数据包和仲裁 ID,还可以在 CAN 帧上执行脚本、Fuzzing,以及内置了几个逆向工具。
安装SaccyCAN(二进制文件):
wget https://github.com/collin80/SavvyCAN/releases/download/V199.1/SavvyCAN-305dafd-x86_64.AppImage
chmod 744 SavvyCAN-305dafd-x86_64.AppImage
./SavvyCAN-305dafd-x86_64.AppImage
启动后如下:

以上是打开了一个CAN Log文件。要想获取ICSim的数据,会发现二进制版的SavvyCAN没有开启接口:

因此需要编译源代码获得完整功能(首先安装Qt5):
git clone https://github.com/collin80/SavvyCAN
cd SavvyCAN
/opt/Qt5.12.4/5.12.4/gcc_64/bin/qmake CONFIG+=debug
make
./SavvyCAN
参考了这个博客。
对汽车安全有兴趣的可以多了解一下,最好有机会去采集一下实车数据。
以上。
更多推荐
 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)