A算法与A*算法
对于A算法,他是使用了一个评价函数f(n)=g(n)+h(n),g(n)表示从起点到当前点的代价,h(n)表示预估代价,就是从当前点到终点的代价,每次选取当前f(n)最小的进行扩展。在平常的搜索算法中,BFS和DFS算是盲目搜索,BFS搜索从a到b的最短路径,会从自己各个方向依次扩展,效率低下,因此出现了启发式搜索,A算法和A*算法。(n),对h(n)进行了限制,是优化版的A算法。算法则是对A算法
在平常的搜索算法中,BFS和DFS算是盲目搜索,BFS搜索从a到b的最短路径,会从自己各个方向依次扩展,效率低下,因此出现了启发式搜索,A算法和A*算法。
对于A算法,他是使用了一个评价函数f(n)=g(n)+h(n),g(n)表示从起点到当前点的代价,h(n)表示预估代价,就是从当前点到终点的代价,每次选取当前f(n)最小的进行扩展。
A*算法则是对A算法进行了优化,让h(n)≤h *(n),对h(n)进行了限制,是优化版的A算法。
A*算法
-
在模型的状态空间很大时,如果用传统BFS找最小步数,会导致MLE或者TLE,因此可以使用A*算法
-
A*算法就是启发式搜索,考虑当前已有代价和到终点的预估代价,因此可以优先扩展整体代价最小的点,可以少扩展许多无用的点
A*算法基本步骤:
-
用一个优先队列来存(小根堆),将起点入队,队列中存储的是d(u)+f(u) 和 当前状态, d(u)是从起点到u的实际距离,f(u)是从u到终点的估价距离
-
每次从队头取出元素进行扩展,将扩展到的元素入队
-
直到终点出队才能求出最小值
A*算法注意事项:
-
使用A*算法的前提是该问题必须有解,如果无解,就和普通bfs一样,搜索全部空间,并且A*使用优先队列,每次入队时间复杂度为logn,比普通bfs时间复杂度还高
-
A*算法当终点出队时,可以求出终点到起点的最小步数,且只能求出起点到终点的最小步数,其他点出队不一定是最小步数
-
A*算法必须满足
f(u) <= g(u),f(u)是从u到终点的预估代价,g(u)是从u到终点的实际代价
证明: 为什么终点出队时,为最优解
设终点出队时的距离为d,假设不是最优解,则 d > d0(最优解)
当前队列中一定存在一个点u是在最优路径上的【最差是起点】,那么d(u) + f(u) <= d(u) + g(u) = d0,那么d > d0 > d(u) + f(u),
即当前出队的应该是u这个点,矛盾,因此终点出队一定是最优解
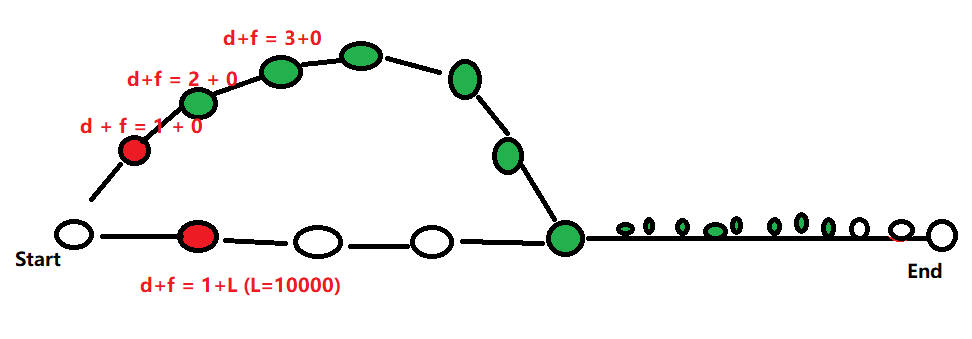
证明: 为什么其他点出队不一定为最小值:

如图所示,设每条边权值为1,首先起点扩展出两个红色的点,设上边点的估价值都为0,下边点的估价值为一个很大的数,那么就会一直去扩展上边的点,当两条边交点处那个绿色的点出队后,他的距离是用上边那条边计算得到的,不是最小值,他出队后对继续向后扩展,直到扩展到某个点T,或者扩展到终点,然后继续出队时,当前队列中最小值就下边红色的点,因为f(u) <= g(u),即L的长度是小于等于他到终点的真实长度的,即当从上边的边往终点扩展时,扩展到某个点时,最差是扩展到终点时,当前的代价加上估计代价,是一定大于下边第一个红色点处的d(u) + f(u),所以就开始从下边那条边扩展,然后就会得到最优解。将下边红色点出队,这时在依次向后扩展,一直扩展到终点,然后终点为当前队列最小值,终点出队,得到最优解
尧米是由西云算力与CSDN联合运营的AI算力和模型开源社区品牌,为基于DaModel智算平台的AI应用企业和泛AI开发者提供技术交流与成果转化平台。
更多推荐
 9
9 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)