
三维点云实时和离线生成二维栅格、三维栅格地图(附github)
导航“前端”,将定位后的三维点云实时或离线三维到二维栅格化,并计算代价生成代价地图。当前雷达帧local_cloud_frame: "/current_scan"全局三维点云地图、三维栅格地图、二维栅格地图。全局点云pcd:global_map。实时当前帧三维栅格地图、二维栅格地图。
·
github:
GitHub - goldqiu/Map_Conversion: 导航“前端”,将定位后的三维点云实时或离线三维到二维栅格化,并计算代价生成代价地图。
Map_Conversion
导航“前端”,将定位后的三维点云实时或离线三维到二维栅格化,并计算代价生成代价地图。
运行
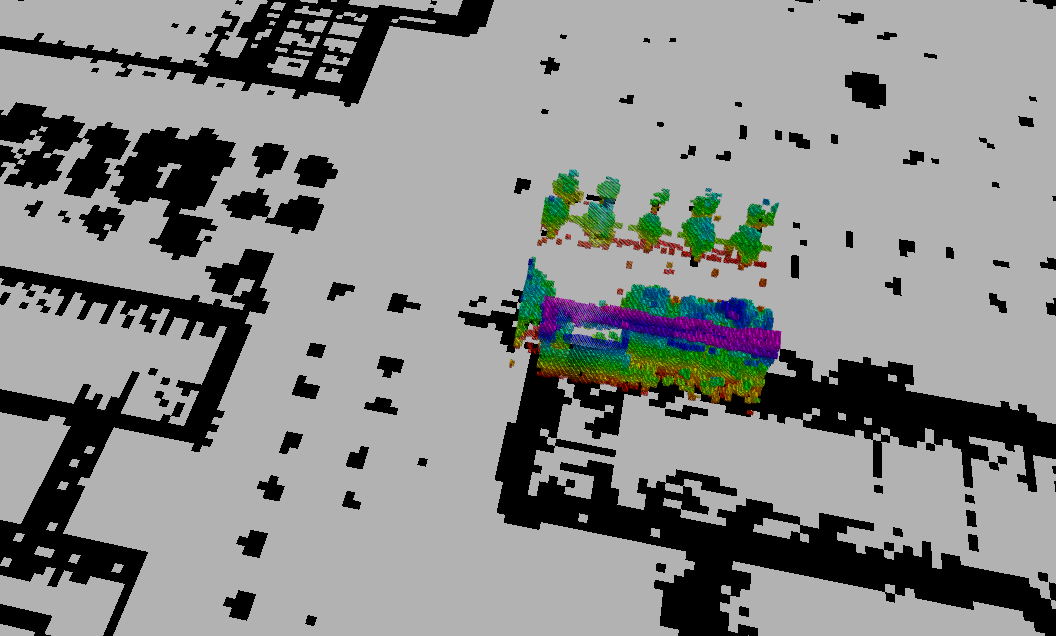
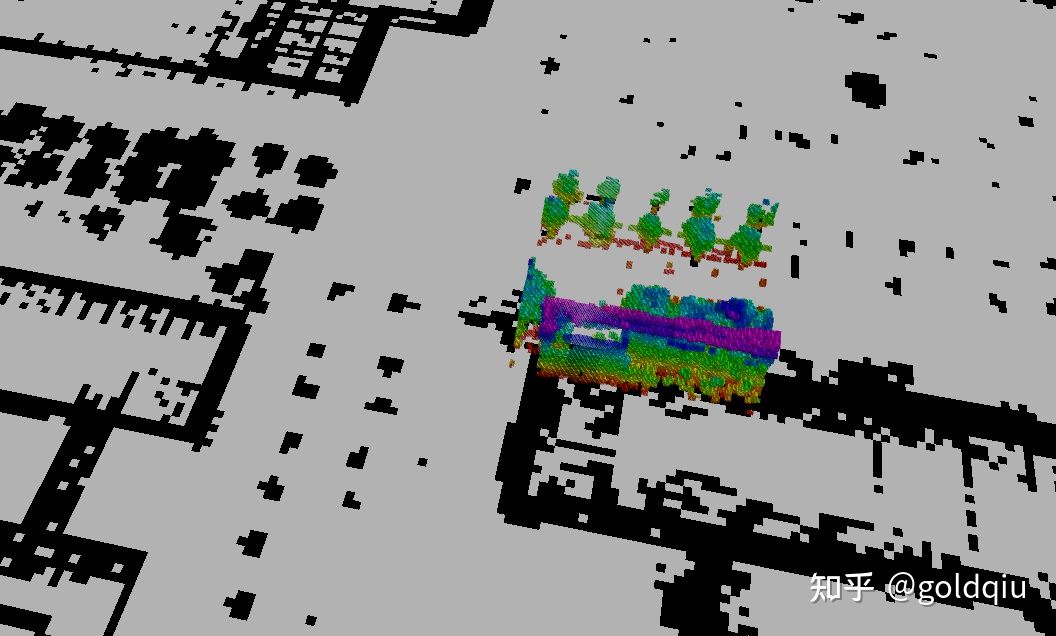
roslaunch map_conversion slam_to_planning.launch效果
参数
%YAML:1.0
Global_file_directory: "/home/qjs/code/ROS_Localization/global_localization_chapter4_ws/src/lidar_localization/slam_data/map/filtered_map2.pcd" #全局地图文件位置
frame_id: "map"
local_cloud_frame: "/current_scan" #局部雷达原始帧话题 (/laser_cloud_map)
global_max_z: "0" #这两个参数是调整全局栅格地图的Z轴直通滤波的范围
global_min_z: "35"
current_max_z: "5" #这两个参数是调整实时栅格地图的Z轴直通滤波的范围
current_min_z: "0"
2d_global_map_resolution: "1"
2d_current_map_resolution: "0.1"
3d_x_size: 30.0
3d_y_size: 30.0
3d_z_size: 10.0文件介绍
│ CMakeLists.txt
│ package.xml
│ README.md
│
├─cmake
│ eigen.cmake
│ global_defination.cmake
│ glog.cmake
│ PCL.cmake
│ yaml.cmake
│
├─config
│ params.yaml //参数配置
│ rviz_test.rviz
│
├─include
│ └─map_conversion
│ │ tic_toc.h //运行时间计算类
│ │ utility.hpp //通用头文件、结构体等存放
│ │
│ ├─cloud_filter //点云滤波算法
│ │ box_filter.hpp
│ │ cloud_filter_interface.hpp
│ │ no_filter.hpp
│ │ voxel_filter.hpp
│ │
│ ├─global_defination //工程全局路径生成
│ │ global_defination.h.in
│ │
│ ├─pointcloud_process //点云处理类
│ │ costmap_calculator.hpp //生成代价地图、包括考虑2.5d地形和障碍物
│ │ pointcloud_2d_process.hpp //二维栅格化
│ │ pointcloud_3d_process.hpp //三维栅格化
│ │
│ └─ros_topic_interface //ros数据输入输出接口
│ cloud_data.hpp
│ cloud_publisher.hpp
│ cloud_subscriber.hpp
│
├─launch
│ slam_to_planning.launch
│
├─PIC
│ pic1.png
│ pic2.png
│
└─src
├─app 目前有两个节点
│ global_submap_node.cpp //全局子地图节点,10s的周期
│ local_environment_node.cpp //局部环境节点,用于局部规划,包括全局地图和局部地图的对齐,局部地图、局部代价地图 计算和生成等,10hz频率
│
├─cloud_filter
│ box_filter.cpp
│ no_filter.cpp
│ voxel_filter.cpp
│
├─pointcloud_process //点云处理类
│ costmap_calculator.cpp //生成代价地图,考虑地形和障碍物
│ pointcloud_2d_process.cpp //二维栅格化
│ pointcloud_3d_process.cpp //三维栅格化
│
└─ros_topic_interface //ros数据输入输出接口
cloud_publisher.cpp
cloud_subscriber.cpp输入输出
输入:
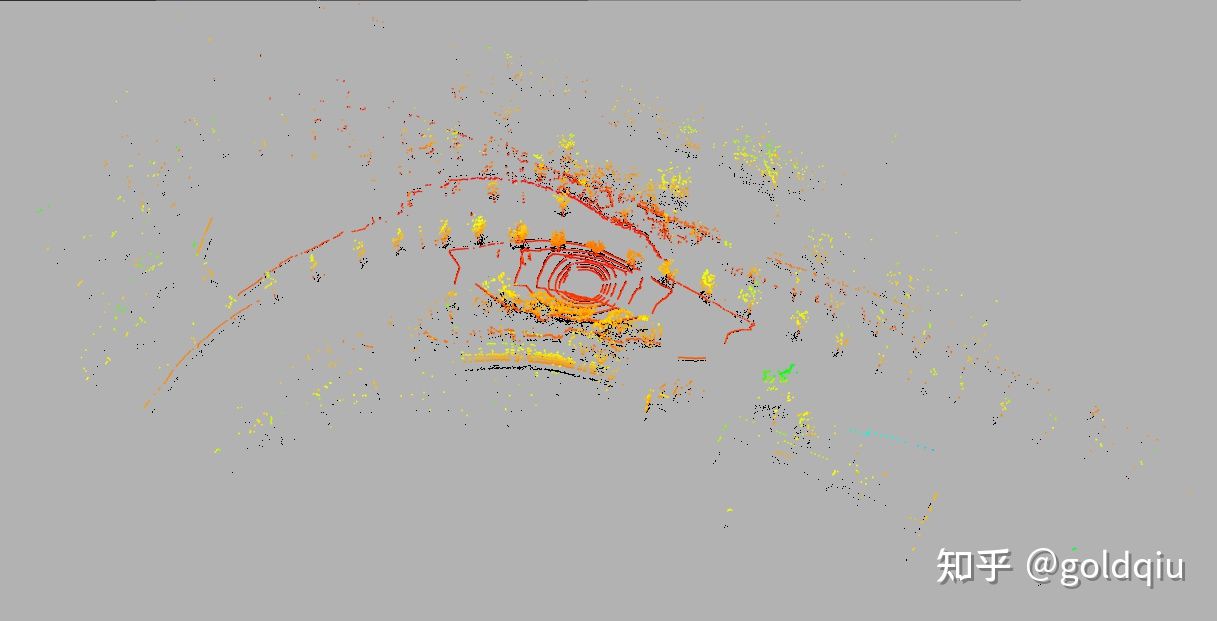
全局点云pcd:global_map
当前雷达帧local_cloud_frame: "/current_scan"
输出:
全局三维点云地图、三维栅格地图、二维栅格地图
实时当前帧三维栅格地图、二维栅格地图

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐

 2
2 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)