自动驾驶仿真(一)—— 基于CarSim与Simulink的ABS系统仿真
自动驾驶仿真一—— 基于CarSim与Simulink的ABS系统仿真1. 各大主流自动驾驶仿真软件2. Carsim仿真软件3. CarSim与Simulink联合仿真3.1 CarSim和matlab软件安装3.2 联合仿真配置3.3 联合仿真实例——ABS系统仿真分析3.3.1 滑移率相关知识3.3.2ABS 系统结构组成3.3.3ABS工作原理及控制策略3.3.4仿真结果对比4.参考学习的
自动驾驶仿真一—— 基于CarSim与Simulink的ABS系统仿真
就自己手上还负责管理的一些自动驾驶仿真建模相关的项目,涉及如VTD建模仿真,Unity建模仿真等,就想着也可以动笔写写自动驾驶仿真相关的内容吧。因为其实自己之前搞汽车研发就是做仿真这块的,一直也都有关注着自动驾驶仿真相关的一些行业动态,并且CarSim和PreScan等自动驾驶仿真软件也是自己用来做过相应的仿真建模学习研究的,对自动驾驶仿真相关的知识和软件实践也是有所积累的。现在新公司这负责技术项目管理这块,在应对VTD及Unity建模仿真等项目时,博主以前在自动驾驶仿真方法及建模相关知识积累,也就帮助自己更好的对接分析客户需求及把控项目状态。现在这些项目也都做得差不多了,那么也就可以简单写写自动驾驶仿真相关的博文了。
1. 各大主流自动驾驶仿真软件
自动驾驶汽车在真正商业化应用前,需要经历大量的道路测试才能达到商用要求。采用路测来优化自动驾驶算法耗费的时间和成本太高,且开放道路测试仍受到法规限制,极端交通条件和场景复现困难,测试安全存在隐患。目前,自动驾驶仿真测试已经被行业广泛接受, 自动驾驶算法测试大约 90% 通过仿真平台完成,9% 在测试场完成,1% 通过实际路测完成。以下介绍几篇不错的相关文章:
中国首部自动驾驶仿真蓝皮书《中国自动驾驶仿真技术研究报告(2019)》
《中国自动驾驶仿真测试技术研究报告(2019)》是目前为止第一部全面介绍中国自动驾驶仿真测试发展现状的工具书,既结合了当前学术机构的前沿研究成果,又结合了领先企业的最新工程实践,内容涵盖自动驾驶仿真测试所有领域,包括:仿真测试市场需求分析、方法应用、搭建技术方案、软件现状、虚拟场景数据库、示范区测试方法介绍、标准介绍、挑战及发展趋势八个部分,由自动驾驶仿真领域多位行业专家意见汇编而成。
其中谈及典型的自动驾驶仿真软件包括传统的动力学仿真软件,也包括较新的来自于国内外初创公司的仿真产品,还有相关的用作交通仿真的商业软件。CarSim、CarMaker、PreScan、PTV Vissim、SUMO、VIRESVTD、rFpro、Cognata、RightHook、Parallel Domain、51Sim-One、Pilot-D GaiA、Metamoto、ESI Pro-Sivic、NVIDIA Drive Constellation、PanoSim、AAI、AirSim、CARLA、LGSVL Simulator、百度 Apollo、Waymo Carcraft
7大国内外自动驾驶仿真平台汇总
上面的文章中列举了PreScan、CarMaker、CarSim、VIRES VTD、PTV Vissim、TESS NG、CARLA等目前国内外较知名的自动驾驶仿真平台的盘点
百度《基于Unity的自动驾驶模拟》
Unity是实时3D互动内容创作和运营平台。包括游戏开发、美术、建筑、汽车设计、影视在内的所有创作者,借助Unity将创意变成现实。百度使用Unity开发自动驾驶模拟的一些工作。文中的视频效果是非常高精度的渲染,可以模拟一天不同的时间,白天或夜晚不同的光照效果,开灯或关灯的效果,还有路面开裂,标志线不清楚等不同的路况。还有不同的天气,下雨天有路面的反射效果,变成晴天的效果。
其实在以上的自动驾驶仿真软件中,VTD软件目前没有试用版,也没有可用的免费license,所以当时想尝试自己电脑安装,但由于没有相关安装资源所以没能如愿。Unity其实更广泛的用于游戏开发中,作为游戏引擎绝对龙头,全平台(包括PC/主机/移动设备)所有游戏中有超过一半都是使用Unity创作的。作为博主自动驾驶仿真系列博文的第一篇,我还是想以汽车行业主流的车企自动驾驶仿真软件先入手来来写,所以就还是基于自己熟悉的CarSim和PreScan软件,做做简要介绍及实例讲解分享,并且结合自己在matlab/simulink的应用积累,就直接先从CarSim与Simulink联合仿真例子开始吧。
2. Carsim仿真软件
CarSim, 还有相关的TruckSim 和BikeSim是Mechanical Simulation公司开发的强大的动力学仿真软件, 被世界各国的主机厂和供应商所广泛使用。CarSim针对四轮汽车, 轻型卡车,TruckSim针对多轴和双轮胎的卡车,BikeSim针对两轮摩托车。CarSim是一款整车动力学仿真软件, 主要从整车角度进行仿真,它内建了相当数量的车辆数学模型, 并且这些模型都有丰富的经验参数,用户可以快速使用,免去了繁杂的建模和调参的过程。

CarSim模型在计算机上运行的速度可以比实时快10倍,可以仿真车辆对驾驶员控制,3D路面及空气动力学输入的响应,模拟结果高度逼近真实车辆,主要用来预测和仿真汽车整车的操纵稳定性、制动性、平顺性、动力性和经济性。CarSim同时提供了 RT 版本,可以支持主流的 HIL测试系统,如 dSpace和 NI的系统,方便的联合进行 HIL仿真。
3. CarSim与Simulink联合仿真
CarSim自带标准的Matlab/Simulink接口,可以方便的与Matlab/Simulink 进行联合仿真,用于控制算法的开发,同时在仿真时可以产生大量数据结果用于后续使用Matlab或者Excel进行分析或可视化。
3.1 CarSim和matlab软件安装
自己当前电脑使用的软件如下配置:
以上两个软件版本联合配置没有问题的。大家可以下载好安装即可。
3.2 联合仿真配置
其实CarSim和Simulink软件的配置还是需要注意的,一般常见的问题其实网上也都能找的到。这里自己简单点两个:
1)软件的版本适配问题
博主博文中的CarSim 8.02和Matlab R2019b联合配置没问题,其他版本可以参考其实联合配置成功的博主亦可。
2)send to simulink提示matlab not found
快捷方式追加参数-regserver,以管理员权限运行快捷方式
3.3 联合仿真实例——ABS系统仿真分析
本博文选择一个基础典型的仿真案例来介绍,ABS系统仿真分析相关的帖子已经不少了,我这里也不会去写太多的操作示意,相比于知其然,知其所以然是更重要的,我这里就简单介绍一下其他博文中论述尚少的理论相关知识吧。毕竟理解相关理论知识,再实操建模做一遍,相关操作就更容易消化和理解。
3.3.1 滑移率相关知识
汽车从纯滚动到抱死拖滑的制动过程是一个渐进的过程,经历了纯滑动、边滚边滑和纯滑动三个阶段。为了评价汽车车轮滑移成分所占比例的多少,常用滑移率s来表示,其定义如下:

式中:u为车速; uw为车轮速度;ω为车轮滚动角速度;r为车轮半径。
当车轮纯滚动时,uw = u ,s = 0;当车轮抱死纯滑动时, uw = 0 , s =100%;当车轮边滚边滑时,u> uw ,0<s<100%。车轮滑移率越大,说明车轮在运动中滑动成分所占的比例越大。
滑移率对汽车车轮制动附着系数ϕX和侧向附着系数ϕy影响极大,从而影响汽车的制动性能。当地面对车轮法向反作用力一定时,滑移率大约在20%左右时制动纵向附着系数ϕx最大,车轮与路面之间的附着力就最大,此时的地面制动力也就最大,制动效果最佳。当滑移率等于零时,侧向附着系数ϕy最大,汽车抗侧滑能力最强,制动时方向稳定性最好。ϕ y随着滑移率的增大而减小,当车轮完全抱死拖滑时ϕ y ≈0 ,汽车制动稳定性最差。
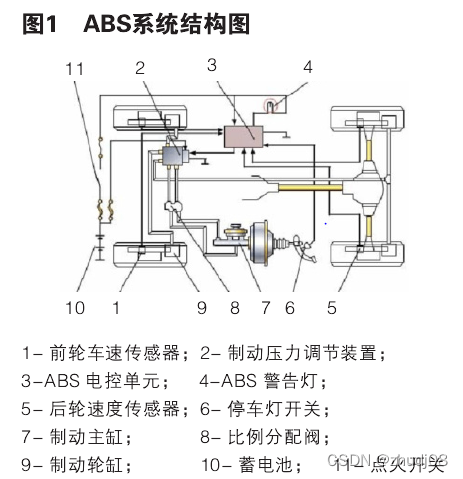
3.3.2 ABS 系统结构组成
ABS系统主要由车轮转速传感器、ABS电子控制装置和制动压力调节器(执行器)三个部分组成。其系统原理结构图如下图所示,车速传感器分别安装前后四个车轮上,当ABS启动工作时,ECU接收车轮轮速信息,各个车轮的制动压力 通过ECU根据各个车轮的速度来控制,车轮液压控制单元接受控制信号对车轮分泵的压力进行调节。
3.3.3 ABS工作原理及控制策略
ABS的工作原理是依靠车速传感器和轮速传感器检测车速和轮速状态,并由电子控制单元计算出实际的车辆滑移率,再通过电磁阀增减制动器的制动力,来控制汽车在车轮紧急制动过程中的实际运动状态,从而使车轮始终保持在最佳的紧急制动状态下,获得最佳制动效果。
在制动主缸/轮缸压力和车速/轮速控制模块中写入ABS的PID控制策略,其策略是以紧急制动时轮胎所期望达到的滑移率为控制目标,通过轮速与车速传感器收集汽车车速、转速信号,同时计算出各车轮轮胎滑移率,并与期望目标滑移率进行比较分析,计算出二者的偏差,并将其输入量输入给PID控制器,在控制的过程中不断的调整PID各个参数值,从而使得制动力大小、实际滑移率也相应改变,反复调节控制参数,最终使实际滑移率处于最佳滑移率附近,使汽车在最佳滑移率所对应的地面制动力下进行制动
3.3.4 仿真结果对比
本次仿真主要考虑有无ABS控制进行仿真和结果对比,具体的建模仿真流程,感兴趣的小伙伴可以参考下面这篇博文:
CarSim与Simulink联合仿真
以下给出自己之前做的仿真结果,加入ABS控制后车速与各轮速的关系曲线:
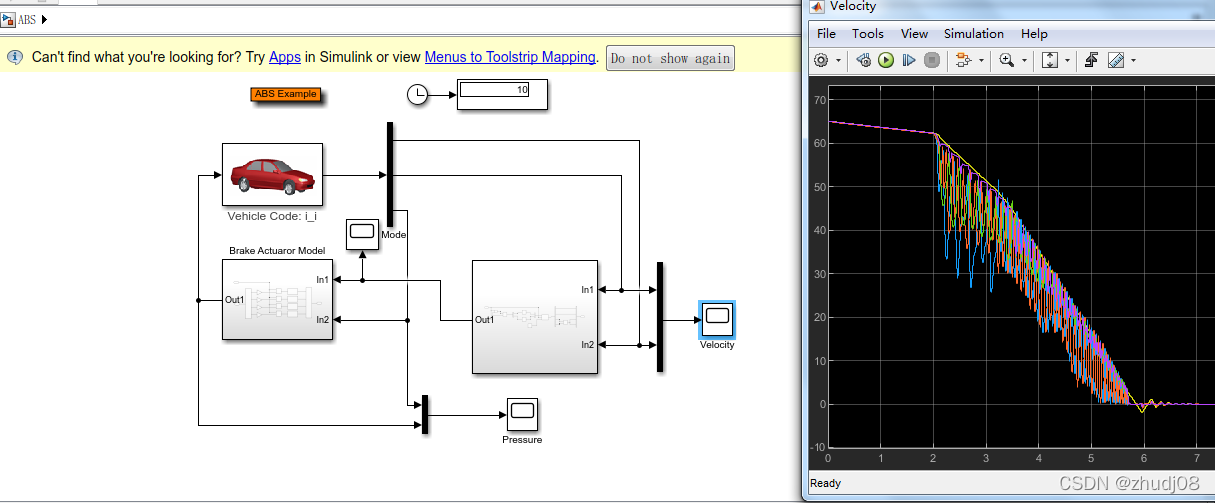
有无ABS控制的仿真结果对比动画示图:
在针对车辆防抱死制动系统测试的双路面紧急制动测试工况下,对于有无ABS控制进行仿真,通过对比分析可以明显的看出:加入ABS后,使车辆具有很好的稳定性能;无ABS车辆横摆角变化特别大,很容易造车车辆侧翻。
4.参考学习的书目教材
- 《车辆CarSim仿真及应用实例 》 李茂月 编著
- 《Matlab/Simulink系统仿真超级学习手册》 石良臣 编著
- 《基于CarSim-Simuink的汽车防抱死控制研究》康南
- 《基于CarSim和Simuink联合仿真的汽车防抱死系统研究》曾凡钦
=文档信息=
本学习笔记由博主原创整理编辑,仅供非商用学习交流使用
由于水平有限,错误和纰漏之处在所难免,欢迎大家交流指正
如本文涉及侵权,请随时留言博主,必妥善处置
版权声明:非商用自由转载-保持署名-注明出处
署名(BY) :zhudj
文章出处:https://zhudj.blog.csdn.net/

为开发者提供自动驾驶技术分享交流、实践成长、工具资源等,帮助开发者快速掌握自动驾驶技术。
更多推荐
 15
15 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)