




- @ykevin0510
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
1.RIKIBOT KCF追踪跟随1.1 相关包说明KCF追踪跟随功能,是利用Opencv KCF做特定追踪功能,这里我们引入了rgbd摄像头的深度功能,能够检测追踪目标的距离,从而能让小车进行前后左右追踪跟随。跟随说明:识别的物体距离小于1.2米,机器人会往后退,大于1.6米,机器人会前进。介于1.2米到1.6米之间,停止不动。1.2 相关功能使用操作使用前,确保接好深度摄像头。1.2.1 打开
1.RIKIBOT opencv_apps图像处理示例1、把小车平放在地板上,用远程软件登录到系统桌面,打开一个终端启动roslaunch rikibot camera.launch2、启动roslaunch opencv_apps edge_detection.launch进行边缘提取采集。效果如下:3、启动roslaunch opencv_apps hough_lines.launch进行哈夫
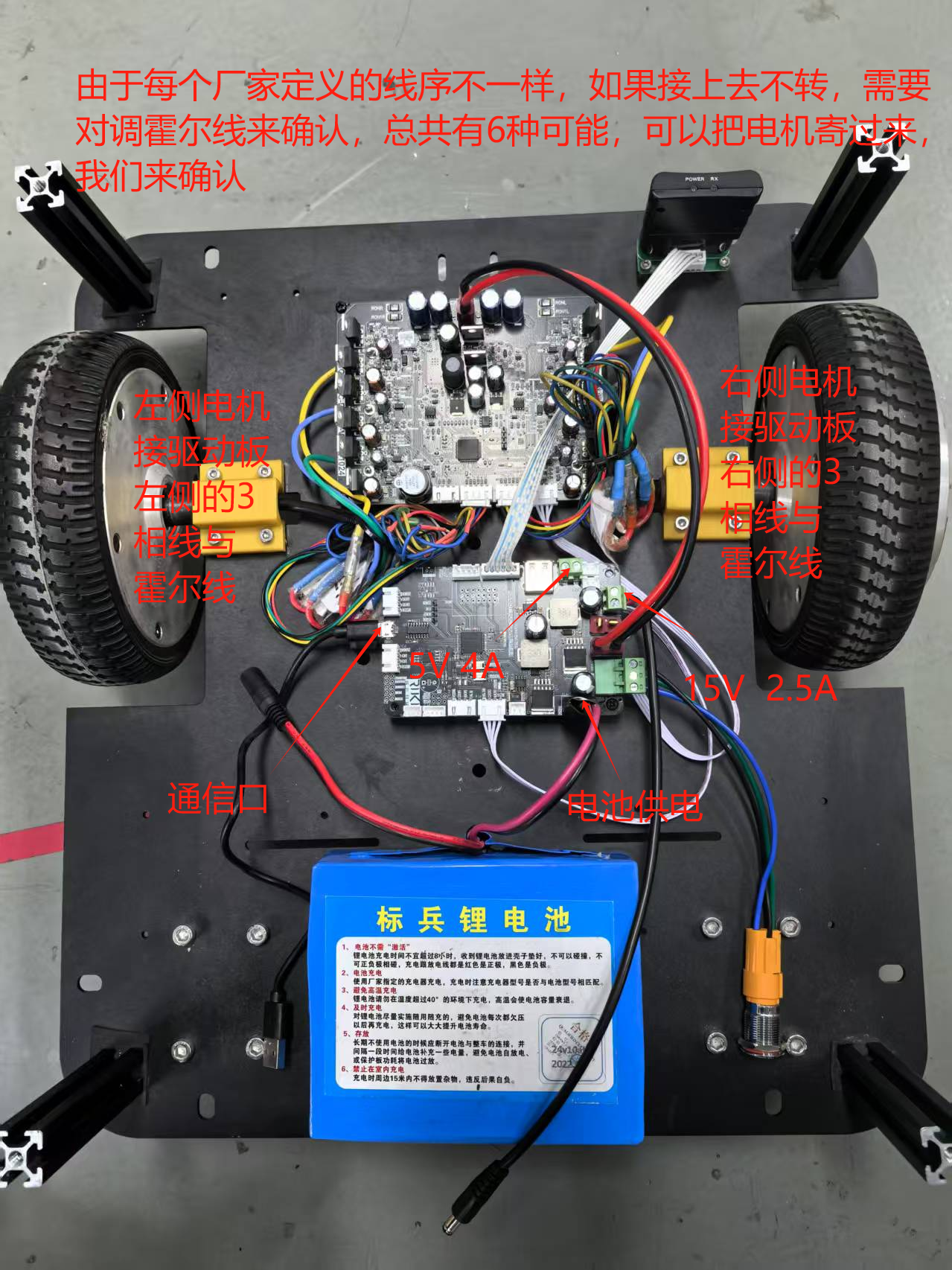
轮毂电机的优势是负载大、安静、省电,由于买我们家的FOC控制板的用户,做AVG小车与SLAM负载小车,但由于购买了不同配置的用户,使用中会遇到各种问题,这里把每种配置的使用教程都出个详细的文档与视频。这里是针对购买了FOC驱动板+控制板的用户需要构建ROS1导航小车的用户。收到配套用户如下图,一块驱动板,一块控制板,PS2手柄一套,开关,供电线、通信线这些,如何快速构建ROS1导航小车,也可以
1.RIKIBOT opencv_apps图像处理示例1、把小车平放在地板上,用远程软件登录到系统桌面,打开一个终端启动roslaunch rikibot camera.launch2、启动roslaunch opencv_apps edge_detection.launch进行边缘提取采集。效果如下:3、启动roslaunch opencv_apps hough_lines.launch进行哈夫
基于ROS2+激光雷达系统的构建地图
ROS机器人操作系统ROS系统较为复杂,本小节帮助读者对ROS有个概念认知,方便后面机器人操作。更详细ROS学习,请参考ROS学习资料1.1ROS系统介绍在ROS维基中将ROS定义为"ROS是一个开放源代码的机器人元操作系统。它提供了我们对操作系统期望的服务,包括硬件抽象、低级设备控制、常用功能的实现、进程之间的消息传递以及功能包管理。它还提供了用于在多台计算机之间获取、构建、编写和运行代码的工具
目录一、 简介二、查找色值1、摄像头的角度调2、启动检测与查找三、 验证HSV色值1、写入色值到文件2、启动检测四、交流方式一、 简介这里学习一下如何用摄像头检测HSV色值,Opencv的HSV色块检测适合单一颜色的色块检测,如果是进行单一颜色的识别与检测,HSV色值检测会比较方便,但缺点也很明显,色值受光线干扰比较大,然后色值有6个值,如果对着色值表去查找效果不一定很好,这里通过工具对色块目标进

激光雷达的slam地图构建这里演示常用的是gmapping算法来构建地图,当然Rikirobot的功能很强大,集成了多种slam算法,像谷歌的Cartographer,hector,kartgo等构图算法都已经支持,按我们的使用视频操作就行,后面也会出文章说明。1、首先我们上电启动小车,然后接上雷达(tips:rpliadr A1雷达上电就会转, A2雷达上电后需要执行建图命令后才转),然...
外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-YpnB5E3F-1666166365150)(C:\Users\30405\AppData\Roaming\Typora\typora-user-images\image-20220420143941154.png)]rikibot_object_graspRIKIBOT 视觉夹抓抓取包(配合RIKIBOT X4夹抓使用

利用激光雷达进行自动导航这里我们教大家使用的是利用激光雷达导航,关于深度摄像头的导航我们后面会教大家使用1、上电启动小车,主控端执行启动小车的命令:roslaunch rikirobot bringup.launch2、主控端启动导航的命令,等待启动完成:roslaunch rikirobot navigate.launch3、在远程端打开可视频工...