




- @yaked
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
python 脚本当前路径下文件 代码片段。
三维视觉、机器人 AI⚫2013.09 – 2016.07 广东工业大学,硕士⚫2009.09 – 2013.07 华中科技大学文华学院,学士姓名证件类型身份证民族汉身份证(外籍填写护照)号码职称副高级高级工程师性别男职务无博士后(出站/在站/否)否出生日期1991年10月办公电话是否博导否学位硕士所在单位广东省科学院智能制造研究所是否在读硕/博研究生否email现从事专业计算机视觉开发移动电话学
Codeblocks 版本16.01因为仿真需要,找到了这个软件,官网资料有点旧,比较杂乱,记录下安装步骤。下载源码https://www.ode-wiki.org/wiki/index.php?title=Manual:_Install_and_Use 安装codeblocks代码编辑器和premake编译工具。sudo add-apt-repository ppa:da...
摘要:针对DobotCR5控制器与DobotStudioPro2.8.3在Win10/Server 1709及以上版本默认不安装SMBv1的问题,可通过以下步骤解决:1)在Windows功能中启用SMB服务;2)使用sc.exe命令配置lanmanworkstation依赖项(mrxsmb10/20);3)若PowerShell返回false,需关闭功能后重启再重新启用;4)通过\192.168.
Qt安装的时候选择源码,在安装目录下可以看到QtPropertyBrowser的文件。利用模板,新建一个Qt Widgets Application 的工程。工程名任取,使用qmake构建这里建议按默认的,要不和本博客后文对不上,得自己一个个对应修改。在Qt工程的pro文件中加入上图中pri文件的目录,比如我这里是include(C:/Qt/Qt5.14.2/5.14.2/Src/qttools/
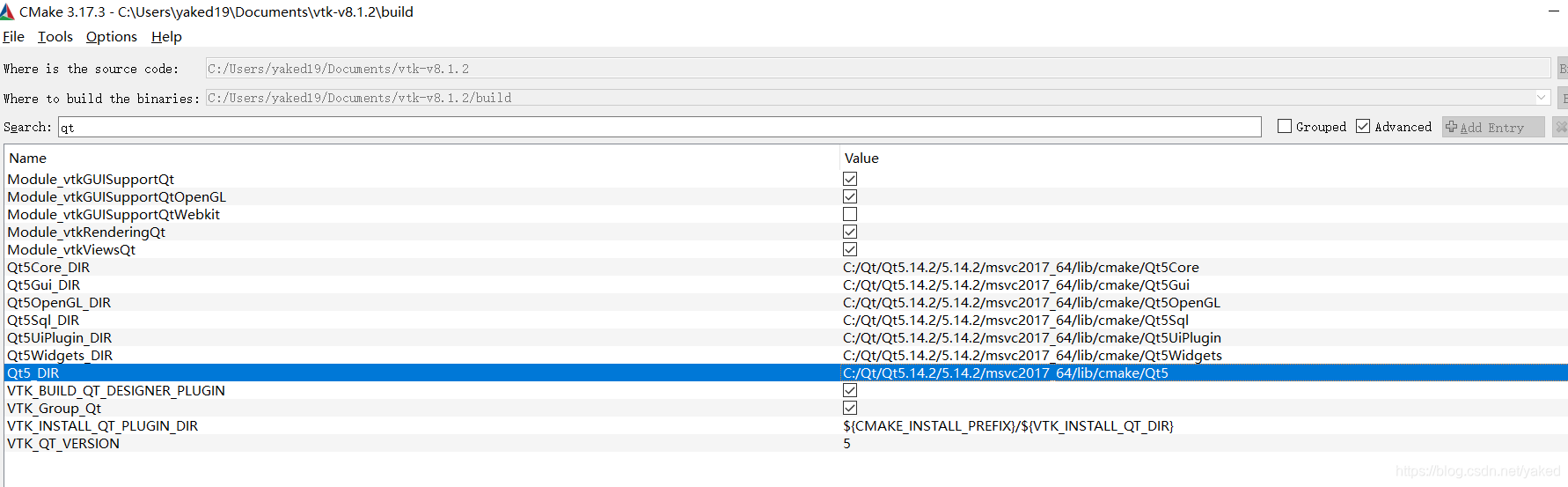
虽然我们在windows下安装PCL的时候就已经安装了VTK,由于跟着PCL安装的VTK是没有和QT联合编译的,所以在使用PCL和QT做点云可视化界面的时候是无法使用QT的插件QVTKWidget。VTK 源码下载https://gitlab.kitware.com/vtk/vtk/-/tags我这里的环境是Win10Visual Studio:2017 CommunityPCL :1.9.1VT
在前面的三篇中,对ros_control也有个大致了解了。这篇就是将之前学到的用于我们实验室的平台KUKA youBot上。在此之前,其实网上已经有关于youBot在Gazebo下的仿真视频了。另外说个题外话,用Gazebo和Riz都可以做仿真,Gazebo最强大的是拥有物理引擎,有物理渲染,有碰撞效果、重力等等。这里参考的package主要是:h
下面文章转载自:https://blog.csdn.net/weixin_42258743/article/details/107506789(一)Halcon的语法结构特点特点:1)Halcon大部分的语句是Halcon提供的算子,此外也包含了少部分的控制语句;2)不允许单独声明变量;3)提供自动的内存管理(初始化、析构及OverWrite),但句柄则需要显示释放;4)C++(算子模式)通过代码
catkin_make 与 catkin build指令记录catkin build作为catkin_make的接班者,https://catkin-tools.readthedocs.io/en/latest/history.html(catkin_make-> catkin_make_isolated->catkinbuild),看到有很多的package都是使用这个命令...
在深度学习和计算机视觉领域中,FP16(半精度浮点数)、FP32(单精度浮点数)和INT8(8 位整数)是常见的数据类型或精度表示方式。它们在不同的场景下有各自的优势和用途。从内存占用上来说:INT8 < FP16 < FP32。从精度上来说: FP32 > FP16 > INT8。