




- @woshi_ziyu
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Charlieplexing(查理复用算法)是一种使用少量I / O引脚控制许多LED的技术。 Charlieplexing与多路复用相同,但它使用三态逻辑(高、低输入)来显着减少引脚数并提高多路复用效率。 Charlieplexing技术以其发明者Charlie Allen命名,他于1995年发明了该技术。Charlieplexing允许您控制N *(N-1)个LED,其中N是引脚的编...
通过使用Arduino开发板和雨量传感器(Rain Sensor)连接,可以轻松制作一个简单的雨水检测系统(Rain Detection System)。传感器将检测到任何降雨,Arduino开发板将对其进行感应并执行所需的操作。这样的系统可用于许多不同的领域,例如农业和汽车领域。降雨检测可用于自动调节灌溉过程。而且,连续的降雨数据可以帮助农民使用该智能系统,仅在需要时才自动为作物浇水。同样,在汽
在本篇文章中,我们将把霍尔效应水流传感器YFS201与Arduino开发板连接,以测量水或任何其他液体的流量和流速。这是一个非常出色的项目,可用于工业、家庭或水龙头、隧道、河流等水流测量应用中。下面介绍使用Arduino和水流传感器进行流量和流速测量的代码以及电路图。该项目可用于测量流经管道或容器的液体,或基于水的流速或水量创建控制系统。例如,您可以在园艺时使用它来测量用于浇灌植物的水量,以防止浪
在本篇文章中,我们将火焰传感器与Arduino进行连接。简单地说,我们将使用火焰传感器和Arduino设计火灾探测器来检测火灾。传感器可以检测出从火焰中发出的760 nm – 1100 nm(纳米)红外光。大部分火焰传感器使用的是YG1006传感器,它是一种高速、高灵敏度的NPN硅光电晶体管。火焰传感器火焰传感器(Flame Sensor)可用于检测波长在760nm – 1100 nm范围内的火源
蓝牙低功耗(BLE)是蓝牙的一个版本,它是经典蓝牙的更小、优化度更高的版本。它也被称为智能蓝牙。 BLE的设计考虑到了低成本、低带宽、低功耗和低复杂度的最低功耗。 ESP32具有内置的BLE功能,但对于像Arduino这样的其他微控制器,可以使用nRF24L01。该RF模块还可以用作BLE模块,将数据发送到其他蓝牙设备,如智能手机、计算机等。在本篇文章中,我们将演示如何使用nRF24L01通过B.
使用Arduino开发板、RTC、气压和温度传感器可以轻松实现类似实时气象站这样简单的小型项目。在生活中,我们使用温度计来测量温度,身边没有任何可测量气压的设备,因此只能依靠新闻得知当前地区的气压。因此,在本篇文章中,我们将开发一种能够同时测量温度和气压的设备,测量结果可以轻松地实时显示在LCD中。因此,我们可以使用很少的电子组件来开发自己的硬件,而这些电子组件的成本大约10美元。所需的组件:●A
在本篇文章中,我们使用Arduino开发板和脉搏传感器(Pulse Sensor)设计了一款心跳/脉搏/BPM速率监视器。脉搏传感器连接到Arduino开发板以监控心跳/脉搏/BPM速率,然后将结果显示在20 * 4 LCD显示屏上。您也可以使用1602或其他形式的LCD显示屏。该传感器非常易于使用和操作。将手指放在传感器上方,它将通过测量毛细血管扩张引起的光变化来感应心跳。脉搏传感器简介脉搏传感
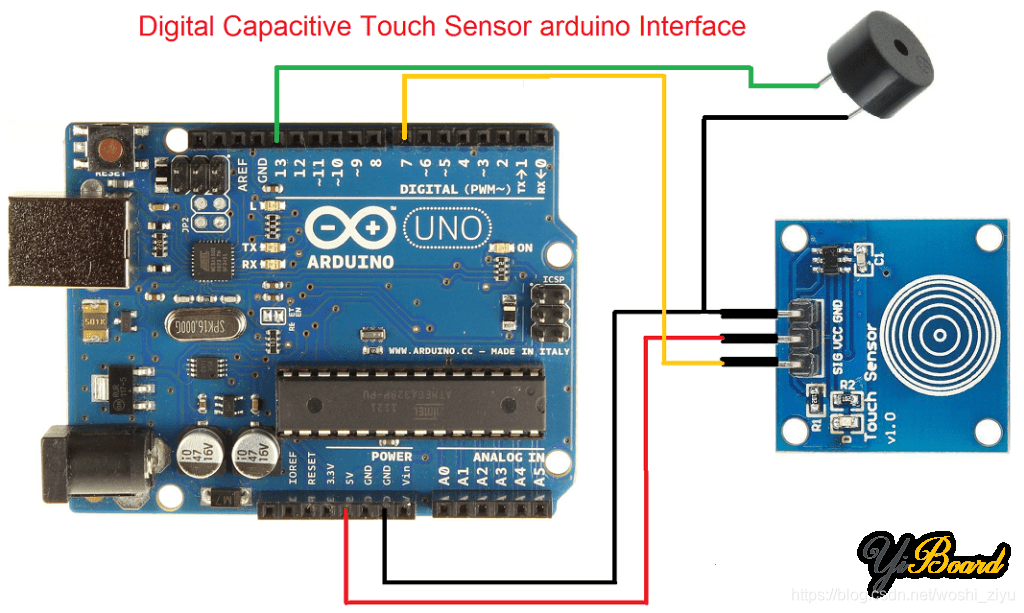
在本篇文章中,我们将TTP223电容式触摸传感器开关与Arduino开发板进行连接,用于设计触摸检测器。使用Arduino和TTP223电容式触摸传感器开关的触摸检测器是一个非常简单的项目,用于通过简单触摸实现开关电路。任何家用电器都可以通过将继电器与触摸传感器连接来控制。这些传感器的应用领域经常是防水电子产品、代替传统按键、消费类产品等。我们需要开关来控制电子设备。当我们用湿手使用电子开关时,有
在本篇文章中,您将学习如何在Arduino中使用KY-037声音检测传感器。您可以使用此模块测量环境中声音强度的变化。什么是KY-037声音探测传感器?该模块由用于检测声音的敏感电容式麦克风和放大器电路组成。该模块的输出可以是模拟值和数字值。数字输出充当开关,当声音强度达到某个阈值时激活。可以通过传感器上的电位器调节灵敏度阈值。模拟输出电压随麦克风接收的声音强度而变化。您可以将此输出连接到...
飞行时间TOF是通过各种距离测量传感器(如超声波传感器)测量远处物体距离的常用方法。粒子、声波或物体通过介质行进一段距离所花费的时间的测量被称为飞行时间(TOF)。然后可以使用该测量来计算速度或路径长度。它还可用于了解介质的颗粒或性质,例如成分或流速。可以直接或间接地检测行进物体。超声波测距装置是使用飞行时间原理的最早的装置之一。这些装置发射超声波脉冲,并根据波形反弹回发射器所需的时间测量到固体.