
写文章




- @weiyvyy
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
嵌入式软件开发基础
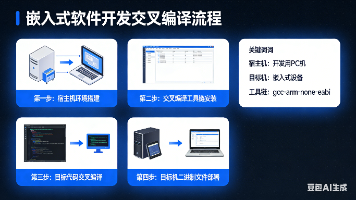
本文系统介绍了机器人嵌入式软件开发的核心技术与实践方法。首先阐述了交叉编译原理及其在嵌入式开发中的必要性,分析了开发环境的选择策略。然后详细讲解了嵌入式C/C++的特殊应用,包括volatile关键字、位操作、中断服务程序设计等关键点。接着深入探讨了实时操作系统(RTOS)的基本原理、任务管理、通信机制和实时性保证。最后全面介绍了交叉编译流程、调试技术演进、生产环境考量以及调试与优化的平衡艺术。文
机器人嵌入式系统概述
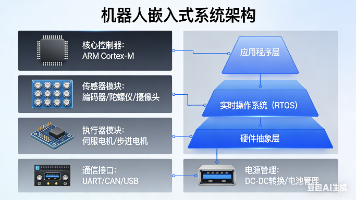
机器人技术发展经历了从机械自动化到智能自主的演进过程。20世纪60年代工业机器人问世,70-80年代微处理器革命带来感知能力提升,90年代后传感器和AI技术深度融合。嵌入式系统作为机器人的核心载体,在感知、决策、执行等环节发挥关键作用,具备专用性、实时性和高可靠性特点。典型机器人系统采用层次化架构,包括硬件层、中间件层、功能层和应用层,设计需兼顾实时性、可靠性和可扩展性。案例研究表明,工业机器人强
机器人嵌入式系统概述
机器人技术发展经历了从机械自动化到智能自主的演进过程。20世纪60年代工业机器人问世,70-80年代微处理器革命带来感知能力提升,90年代后传感器和AI技术深度融合。嵌入式系统作为机器人的核心载体,在感知、决策、执行等环节发挥关键作用,具备专用性、实时性和高可靠性特点。典型机器人系统采用层次化架构,包括硬件层、中间件层、功能层和应用层,设计需兼顾实时性、可靠性和可扩展性。案例研究表明,工业机器人强
到底了