
写文章




- @weixin_64433850
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
第一部分:环境搭建与基础配置
universal_robot包需要使用 melodic-devel-staging分支,这个分支包含了最新的更新并兼容 ROS Noetic。依赖缺失:重新运行 rosdep install --from-paths src --ignore-src -r -y。在下一篇教程中,我们将开始修改 URDF 文件,实现 UR5 与 Robotiq 夹爪的连接。这个过程可能需要几分钟,请耐心等待。第三

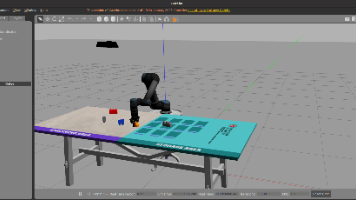
【超详细】Ubuntu20.04 + ROS Noetic + Gazebo 实现 UR5 机械臂视觉抓取乐高积木仿真
主要功能:在 Gazebo 中仿真 UR5 机械臂 + Robotiq85 夹爪使用 Xbox Kinect 相机获取场景图像使用 YOLOv5 识别 11 种不同类型的乐高积木机械臂自动抓取积木并放置到指定位置本教程完整介绍了如何在 Ubuntu 20.04 + ROS Noetic 环境下复现 UR5 机械臂视觉抓取仿真项目。主要步骤安装必要的 ROS 包和工具下载并编译项目源码安装 YOLO
到底了