- @weixin_54858125
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
KUKA机器人快速启动设置
KUKA机器人KR 3 D1200 HM介绍

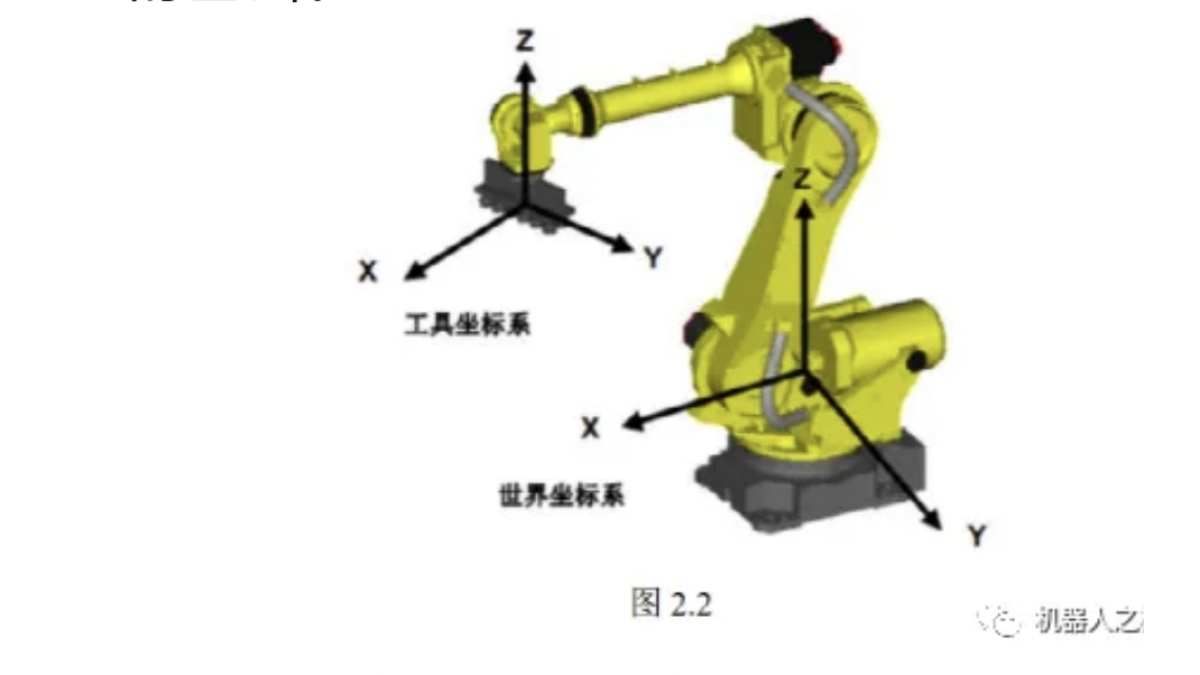
可简单理解为,直角坐标系的坐标值 X、Y、Z 是工具坐标系的原点在用户坐标系下的坐标值,直角坐标系的旋转值 w、 p、r 是工具坐标系 X、Y、Z 轴相对于用户坐标系 X、Y、Z 的旋转量。④用户坐标系:用户坐标系,由用户自定义,系统默认可建立9个用户坐标系(用户号为 1~9),若没有建立用户坐标系,则默认世界坐标系为用户坐标系,此时用户号为 0。①机械接口坐标系:定义在机器人6轴法兰盘中心的坐标
LoadDataDetermination 是 KUKA 负载测试 软件,通过输入正确的载荷数据 (质量、重心、惯性矩 ),避免机器人 的过载。它可以配合光切传感器一 起,用于大量的应用领域,例如气体保护焊接、激光焊接等。对于不同行业的应用,为了方便编程操作,提高效率,KUKA 机器人提供了不同的软件选项。实现机器人控制系统和传感器系统之间的数据交换 , 通过传感器信号的处理对机器人运动或程序运行

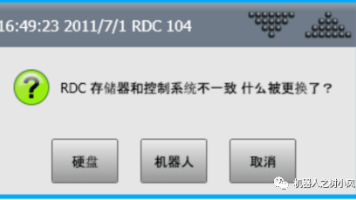
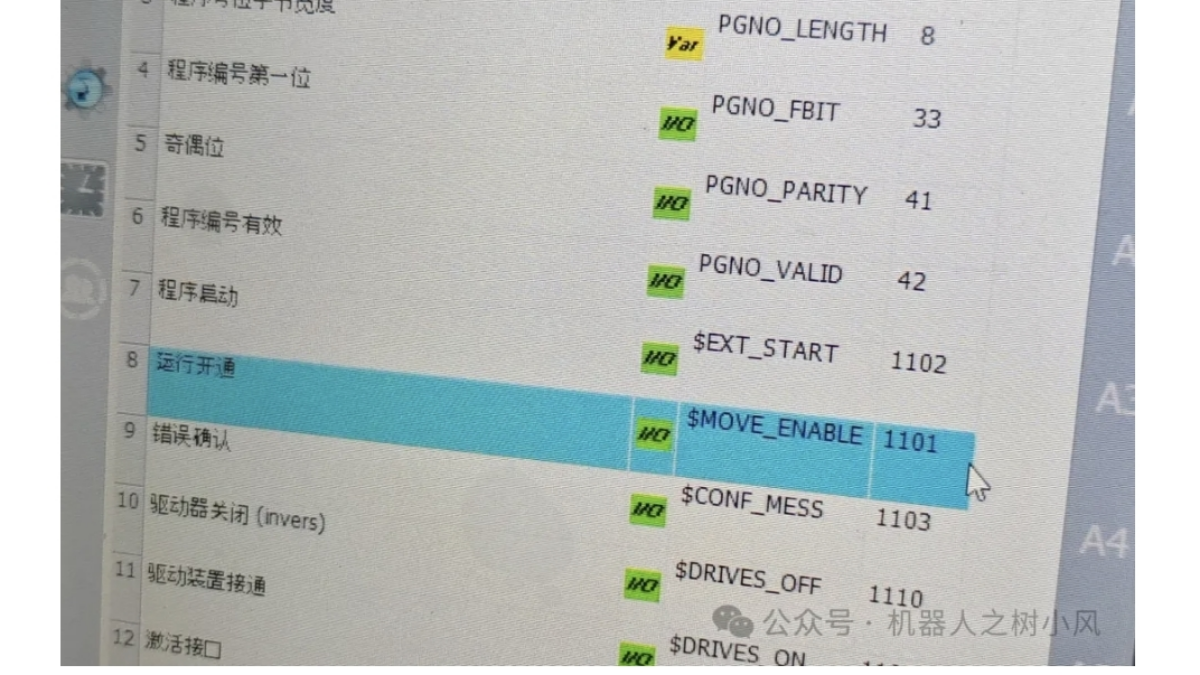
②在【输入端】找到$MOVE_ENBALE 对应的通道改为1025。分析:这种情况一般是机器人首次开机时出现的,机器人出厂时没有将蓄电池的插头插在控制柜内的 CCU 板卡上。处理:将使能键按到底,会出现“确认开关故障”的确认信息,点击“OK”即可。措施:找到控制柜内的蓄电池电源插头,插到对应标签的 CCU板卡插口上。①【主菜单】—【配置】—【输入/输出端】—【外部自动运行】下;②示教器操作:【菜单
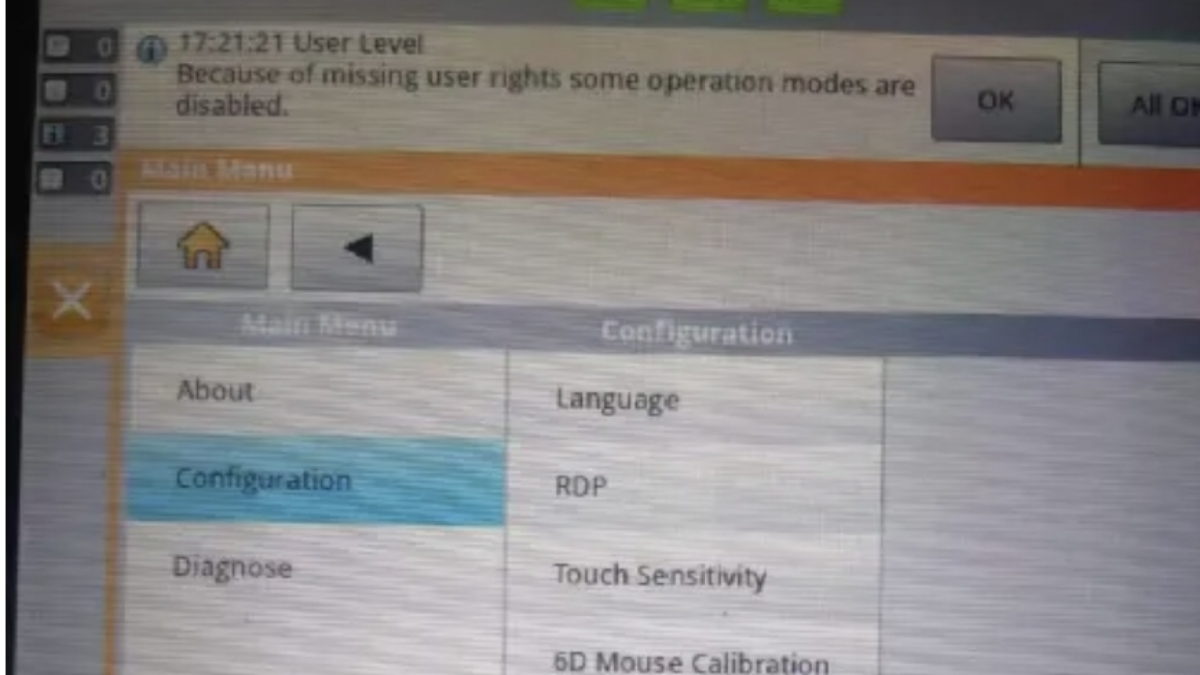
KUKA机器人KRC4的示教器升级后,示教器屏幕由之前的电阻屏改为电容屏,不仅在外观上有所变化,屏幕校准的方法也有所不同。通过以下方法分别对新旧两款示教器进行屏幕校正,调整示教器屏幕灵敏度。默认的为Normal,如果发现触摸屏不灵敏,可以选择High模式调整屏幕灵敏度。二、按下示教器上的【主菜单】按钮,依次选择【Configuration】-【Touch Sensitivity】旋转钥匙,再按下主
KUKA机器人中断编程4—探寻功能的编程

ABB机器人配置Cross Connection功能的方法

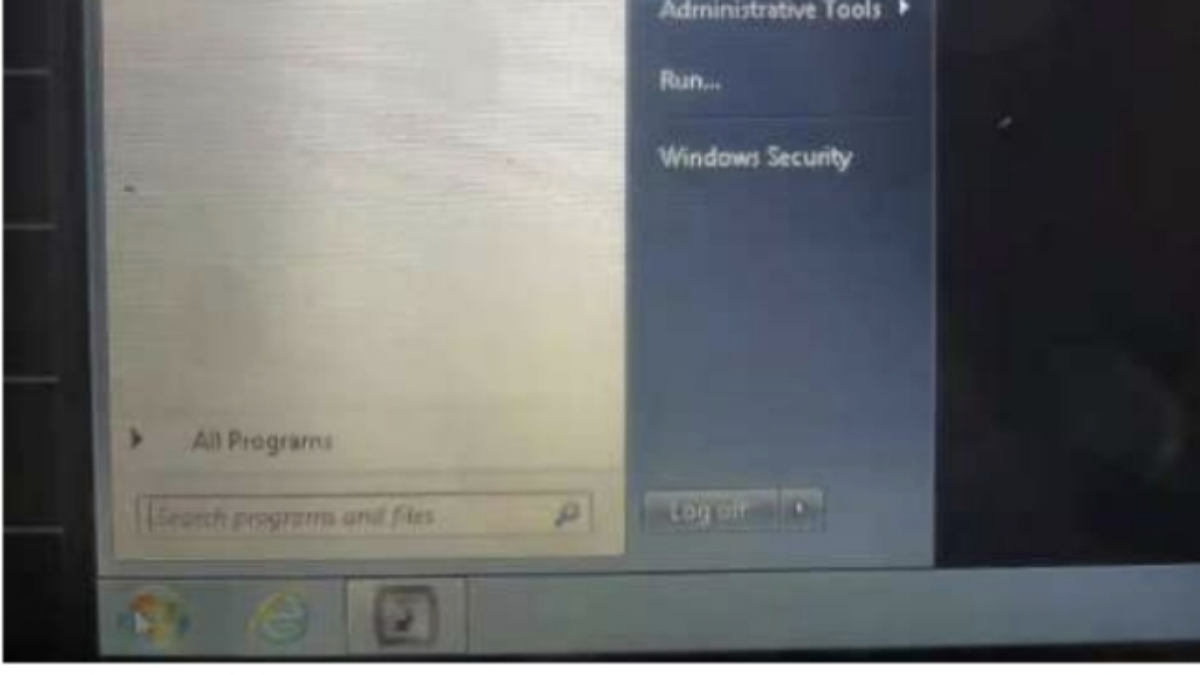
KUKA机器人示教器上更改时间和HMI最小化设置
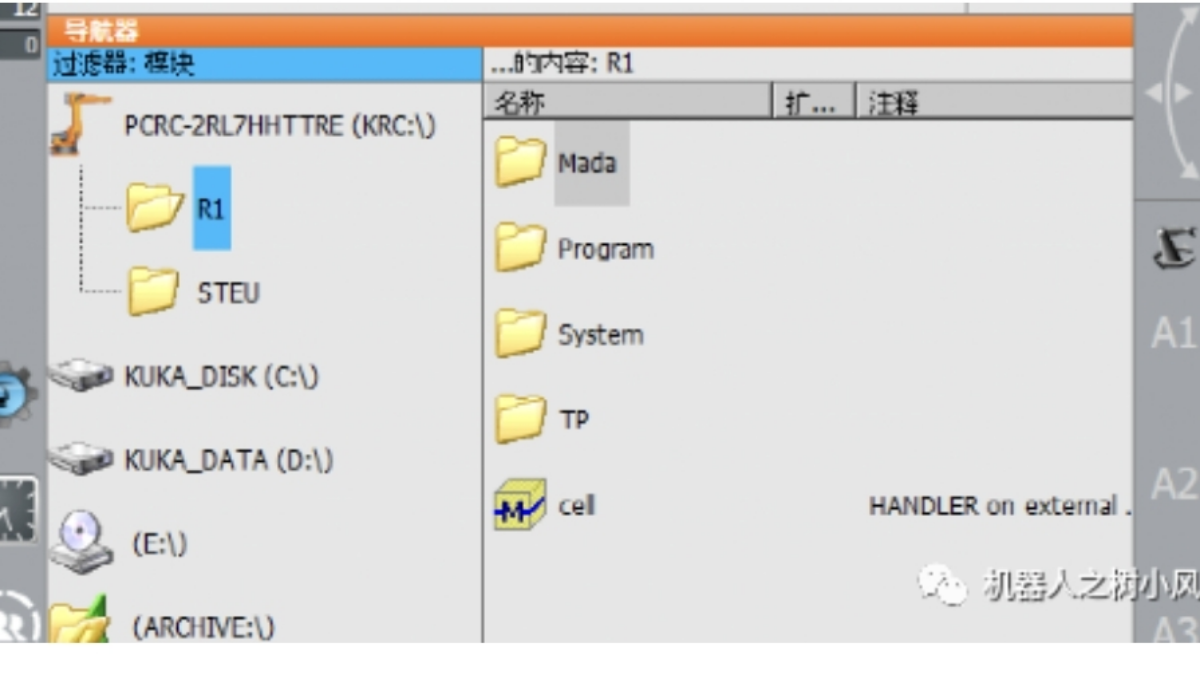
在KUKA机器人的使用中,编程时需要新建程序模块,有6种不同类型的模块,分别为:Cell、Expert、Expert Submit、Function、Modul、Submit。3、Expert Submit:创建新的 SUB 程序,即提交解释器运行的程序。该模板生成空的SUB文件,对于该模板,所有的内容都必须由用户自己编程设定。新建专家模块后,里面是空的,初始化的程序部分也没有,都需要自己编程设定