
写文章




- @weixin_51002159
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
ROS Noetic搭建PX4仿真环境
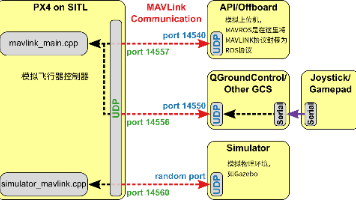
参考链接:https://blog.csdn.net/HuangChen666/article/details/128754106https://www.yuque.com/xtdrone/manual_cn/basic_config_13MAVROS是ROS(机器人操作系统)下的开源功能包,核心作用是搭建ROS与MAVLink协议设备(如PX4飞控)之间的通信桥梁,适配ROS1与ROS2版本(含
ROS Noetic搭建PX4仿真环境
参考链接:https://blog.csdn.net/HuangChen666/article/details/128754106https://www.yuque.com/xtdrone/manual_cn/basic_config_13MAVROS是ROS(机器人操作系统)下的开源功能包,核心作用是搭建ROS与MAVLink协议设备(如PX4飞控)之间的通信桥梁,适配ROS1与ROS2版本(含
到底了