
写文章




- @weixin_49979585
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
KUKA机器人首次上电
XS1(1):控制柜电源接口X11(7):机器人安全回路接口X19(10):机器人示教器smartpad接口X20-X30 (2、3):控制柜到机器人本体的动力线(21-控制柜)X21-X31 (11):控制柜给机器人本体的数据线(31-机器人本体)X32 :零点校正接口。

KUKA机器人首次上电
XS1(1):控制柜电源接口X11(7):机器人安全回路接口X19(10):机器人示教器smartpad接口X20-X30 (2、3):控制柜到机器人本体的动力线(21-控制柜)X21-X31 (11):控制柜给机器人本体的数据线(31-机器人本体)X32 :零点校正接口。
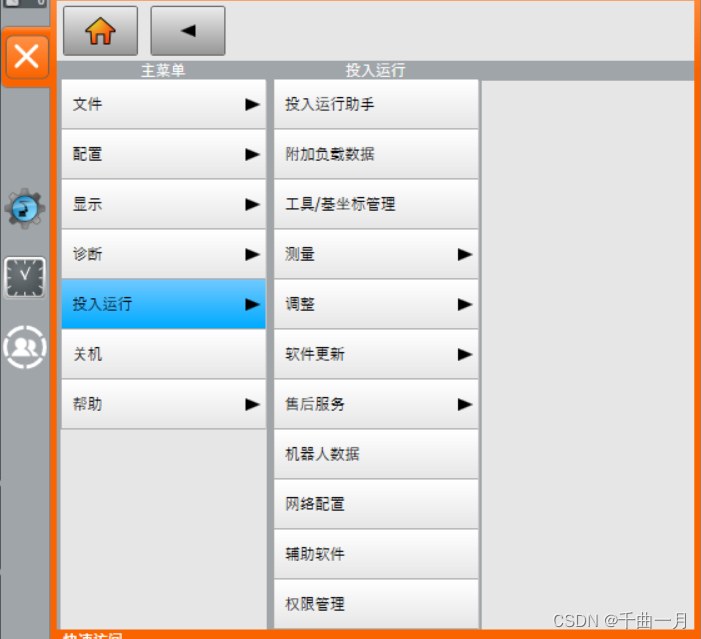
KUKA机器人BASE/TCP/程序模板导入
菜单>投入运行>工具/基座标管理>输入仿真BASE数据。
到底了