- @weixin_45742947
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
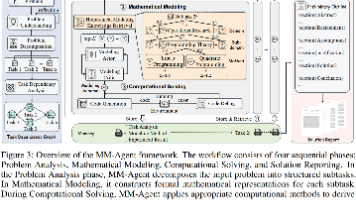
MM-Agent框架利用大型语言模型(LLM)作为代理,解决真实世界的数学建模问题。研究构建了首个数学建模基准MM-Bench(包含111个竞赛问题),并提出层级化数学建模知识库HMML来结构化建模方法。MM-Agent通过四个阶段工作:问题分析、数学建模、计算求解和报告生成,其中创新性地采用Actor-Critic机制进行迭代优化。实验表明,该框架显著优于基线模型,并在2025年MCM/ICM竞
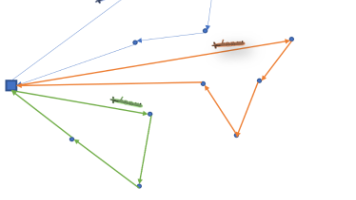
摘要: 本研究提出了一种针对能量受限环境下多AUV任务分配问题的优化方法。通过将问题建模为容量限制车辆路径问题(CVRP),采用SCIP求解器进行全局优化,同时考虑导航时间、能耗约束和任务持续时间。实验结果表明,该方法在保证全局最优性的基础上,显著提升了任务分配效率。与粒子群优化(PSO)算法相比,SCIP求解器在计算时间和解的质量上均表现出优势,为水下多AUV协同作业提供了可靠的理论框架和实用指
摘要: 本研究提出了一种针对能量受限环境下多AUV任务分配问题的优化方法。通过将问题建模为容量限制车辆路径问题(CVRP),采用SCIP求解器进行全局优化,同时考虑导航时间、能耗约束和任务持续时间。实验结果表明,该方法在保证全局最优性的基础上,显著提升了任务分配效率。与粒子群优化(PSO)算法相比,SCIP求解器在计算时间和解的质量上均表现出优势,为水下多AUV协同作业提供了可靠的理论框架和实用指
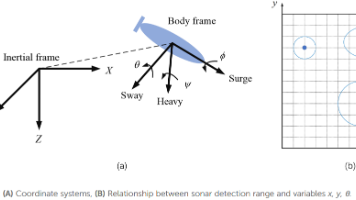
本文提出了一种考虑洋流和声呐性能的多AUV覆盖路径规划方法。通过建立声呐探测范围随地形变化的动态模型,结合改进的Dijkstra算法计算洋流影响下的最短路径邻接矩阵,并采用粒子群优化算法与ELKAI求解器协同优化多AUV任务分配。实验表明,该方法能有效平衡任务负载,将计算复杂度从O(n²)降至O(n³/²),显著提高了路径规划效率。研究成果为复杂海洋环境下的多AUV协同作业提供了新思路。
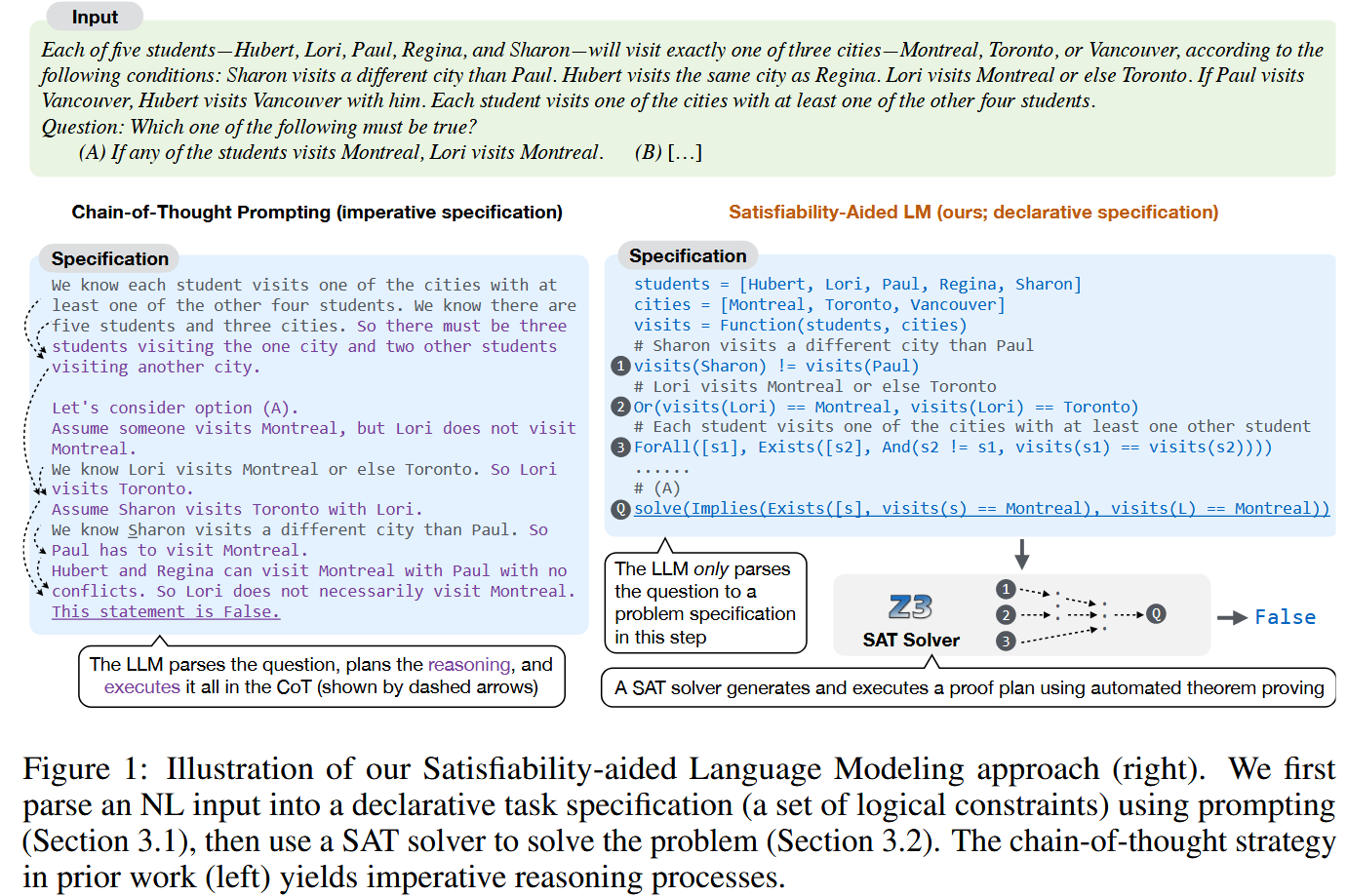
【文献笔记】文章提出了SATLM方式,使用LLM生成声明性任务规范,而不是命令式程序,并利用现成的自动定理证明器推导最终答案