
写文章




- @weixin_43789589
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
(IEEE trans复现 1)自主水下航行器(AUV),动态路径规划,非线性模型预测控制(MPC),后退时域优化(RHO),轨迹跟踪
自主水下航行器(AUV),动态路径规划,非线性模型预测控制(MPC),后退时域优化(RHO),轨迹跟踪
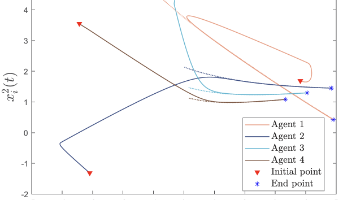
【控制领域TSMC论文复现】基于时变二次规划的分布式多机器人目标围捕
本文提出了一种统一的分布式多Agent系统框架,用于解决两类复杂的时变二次规划问题(TVQP)。该框架创新性地整合了非一致时不变与一致时变两种场景:在第一种场景中,各Agent的优化目标(Hessian矩阵 Qi)和约束(Di)固定但互不相同;在第二种场景中,所有Agent的优化目标(Q(t))和约束(D(t))随时间动态变化但完全一致。通过结合预测-校正优化方法与
到底了