




- @weixin_43485943
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
自回归模型随着gpt的出现取得很大的成功,还是有很多工程上的问题并不是很适合使用自回归模型:1)自回归需要的算力太大,满足不了实时性要求:例如在自动驾驶的轨迹预测任务中,如果要用纯自回归的世界模型,耗时太大;2)要求数据天然有时序性:很多图像任务并没有严格的序列生成的要求;这个部分开始用隐变量的方式来进行建模。

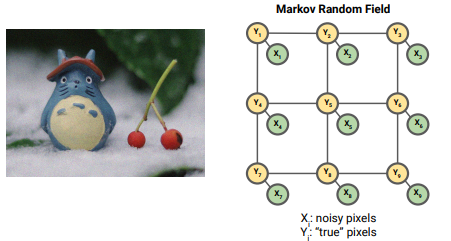
我们在前面几个部分涉及到的自回归和vae 模型,往往输出P(x|y)要么是离散的状态,要么是标准分布(正态分布或者是laplace 分布)。但是在很多时候,需要的loss不仅仅只是数据拟合的更好,还需要满足其他约束(例如说平滑性约束等)以下图为例,要重建图片,保证重建的图像和原始图像接近,同时还需要保证yiy_iyi和yi+1y_{i+1}yi+1附近的像素接近。模型预测的结果y^\hat{y
雅克比矩阵的理论部分机器人逆运动学材料来源于:https://www.cnblogs.com/21207-iHome/p/5948659.html引用请备注上材料的来源者:https://www.cnblogs.com/21207-iHome/p/5948659.html机器人运动学公式参考挖掘机VOLVO walkerexcavator:机器人末端有4个自由度x,y,z和sho...
1 Introductionmatlab optimmization 工具箱功能十分强大,这一章节梳理problem based optimization 问题。Optimization Toolbox™ provides functions for finding parameters that minimize or maximize objectives while satisfying c
回顾一直对科里奥利力理解的有问题,这次重新回顾理论力学,并结合机器人动力学,对以往的知识点做一次回顾。
1 Introduction最近因为一个项目需要使用西门子PLC,买了一个入门级的PLC s7-1200,并完成了一个PLC和PC通过TCP进行通信的小程序,为了防止活干完了,内容就全忘了,所以用一个笔记进行梳理和总结。入门一种语言,需要回答新手的几个问题,这个笔记按照回答的方式梳理。2 问题2.1 PLC是什么,什么时候用,要怎么选?根据[1],PLC可以替代继电器功能并完成复杂的控制功能。个人