




- @weixin_41939376
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
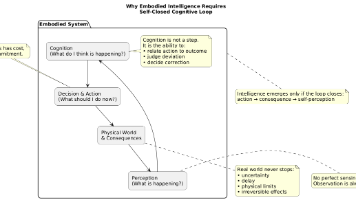
本文讨论了端到端(E2E)方法在具身智能系统中的潜在风险。E2E虽然能提升整体性能,但可能导致认知回路"塌陷"——即系统失去自我校准、故障定位、约束管理和降级能力等关键机制。这种塌陷会使系统在边界场景下不可控,故障难以归因,约束仅成为训练偏好而非生存结构。作者强调,防塌陷不是反对E2E,而是要保持认知回路中的"可见承重墙",如可观测状态、可评估意图、可治理风
摘要:本文基于具身机械主义框架,将工业AMR的认知结构拆解为10个可工程化的核心机制:1)具身载体与可供性接口,强调身体参数对认知的约束作用;2)感知-校准-时空对齐机制,解决工业场景的持续对齐难题;3)分层的世界模型表示;4)四个典型认知回路(稳态控制、局部交互、意图任务、系统治理);5)预测与反事实能力;6)多约束下的行动仲裁机制;7)可控的增量学习;8)具身记忆与证据链;9)多智能体社会性机

摘要:具身智能系统与传统软件的本质区别在于必须承担行为的物理后果,这凸显了"自我闭环认知机制"的必要性。现实世界要求系统持续评估和修正行为,而非单次决策。真正的认知需要系统感知自身行为结果并调整,闭环机制不仅是控制手段,更是认知成立的基础条件。具身智能必须在物理约束下实现闭环,才能确保责任可追溯和系统可持续性。这种闭环认知是具身智能从概念走向工程实践的关键所在。
农业自主移动机器人(AMR)正从技术示范迈向规模化应用,但面临从实验室到田间落地的系统性难题。研究发现,当前多数项目仍以单点技术优化为导向,缺乏对农业场景复杂性的整体把握。文章提出应将其视为"场景驱动的具身智能系统",构建包含机体层、感知执行层、任务调度层、人机协同层和云边端支撑层的五层架构,并建立运行约束、阶段组织等六大核心机制。指出产业竞争将转向系统工程能力,强调需形成任务
农业自主移动机器人(AMR)正从技术示范迈向规模化应用,但面临从实验室到田间落地的系统性难题。研究发现,当前多数项目仍以单点技术优化为导向,缺乏对农业场景复杂性的整体把握。文章提出应将其视为"场景驱动的具身智能系统",构建包含机体层、感知执行层、任务调度层、人机协同层和云边端支撑层的五层架构,并建立运行约束、阶段组织等六大核心机制。指出产业竞争将转向系统工程能力,强调需形成任务
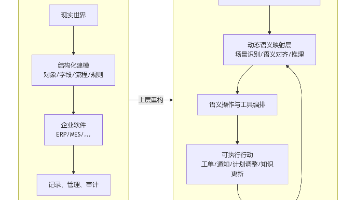
企业活动双层模型是现代制造企业应对业务复杂性的创新管理框架,其核心在于区分协同管理层与执行层两类状态空间。协同层管理业务语义状态(如工单释放、资源承诺),执行层管理操作状态(如设备运行、参数达标),两者通过事件驱动的状态映射机制实现交互。该模型遵循状态分层、语义一致等原则,强调状态转换的可追溯性和异常处理的分级机制。成熟的实施需要建立状态事件总线、语义映射服务等架构组件,最终实现从流程驱动到语义运
企业数字化发展经历了ERP数据记录、BPM流程固化、数据中台建设三阶段,但系统堆砌仍难解协同困境。研究发现,传统数字化存在流程刚性、数据割裂、人工协调等结构性短板。基于此,提出企业活动双层模型(协同管理层+执行层)和语义运行架构,通过业务语义建模实现动态调度。该架构包含八大核心模块,支持AI能力融合,从预设流程转向目标驱动的语义化协同。建议分六阶段实施:业务盘点、双层拆分、场景建模、能力接入、闭环
本文探讨AI时代企业软件的范式转变:从结构化描述转向动态语义映射。传统ERP等系统擅长处理结构化信息,但无法捕捉现实中的网状关联。AI技术使软件能够理解文档、意图等非结构化内容,实现对复杂现实的动态语义映射。文章提出重构企业软件的五个命题,分析其从数据对象到语义对象、从流程驱动到场景驱动等六个转型方向,并构建七层参考架构。核心观点认为AI不是替代传统系统,而是在结构化数据基础上构建语义理解层,形成
本文探讨AI时代企业软件的范式转变:从结构化描述转向动态语义映射。传统ERP等系统擅长处理结构化信息,但无法捕捉现实中的网状关联。AI技术使软件能够理解文档、意图等非结构化内容,实现对复杂现实的动态语义映射。文章提出重构企业软件的五个命题,分析其从数据对象到语义对象、从流程驱动到场景驱动等六个转型方向,并构建七层参考架构。核心观点认为AI不是替代传统系统,而是在结构化数据基础上构建语义理解层,形成
大语言模型应用系统正从以模型为中心转向以能力编排为核心,其中"AgentSkill"成为关键切入点。Skill作为结构化能力单元,包含意图定义、执行逻辑等要素,将隐式能力外化为可管理结构。这一转变实现了从黑盒推理到运行语义化的演进,Skill成为最小可调度语义操作单元,类似传统编程中的函数。系统架构呈现出"语义驱动执行引擎"特征,支持动态任务分解与执行。在企