




- @wanghq2013
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
#阿克曼车辆运动学模型#参考文献:阿克曼车辆运动学模型阿克曼车辆运动学模型
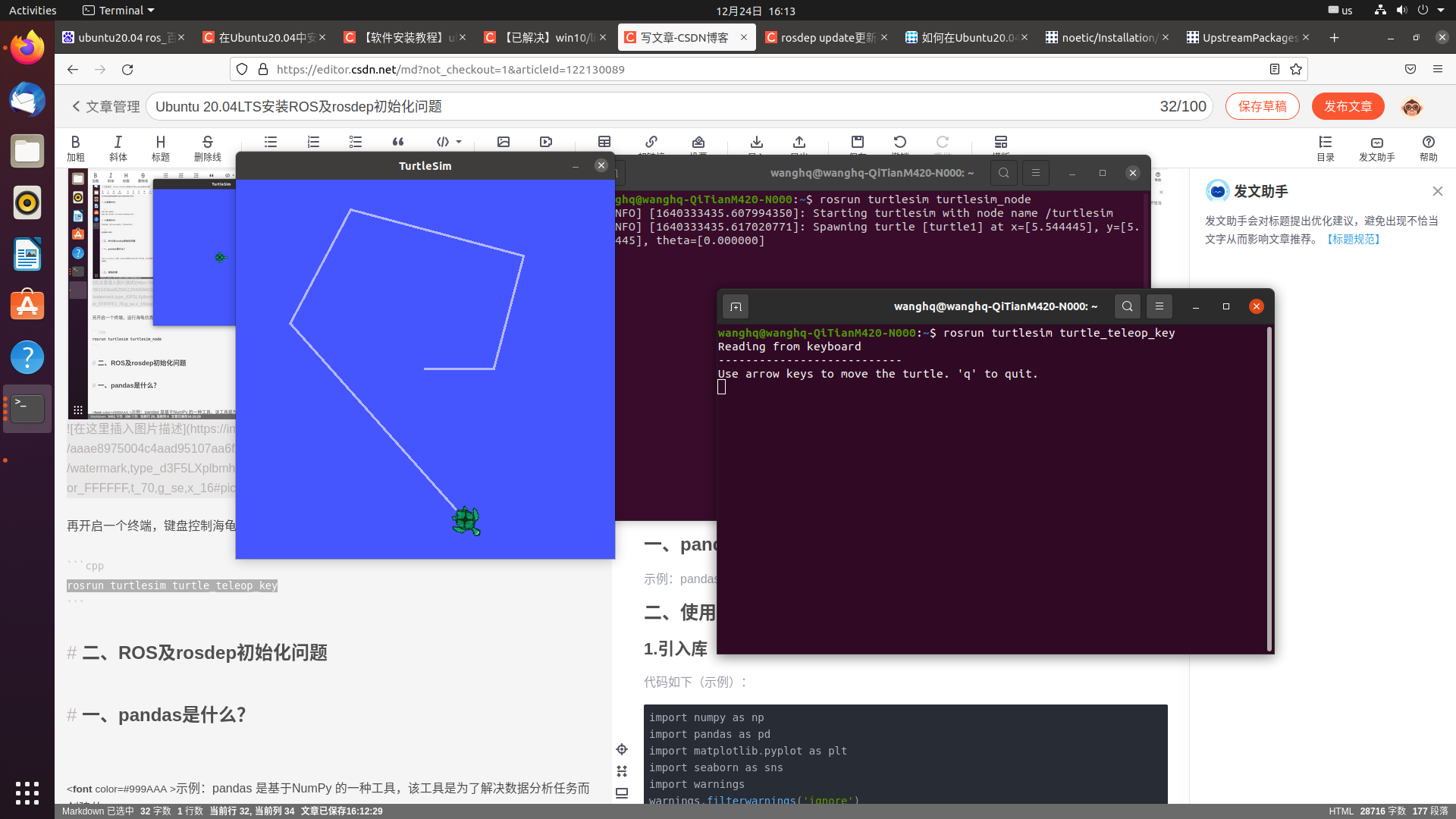
文章目录一、Ubuntu 20.04LTS安装1. 设置源2.设置密钥3.安装ROS4.测试ROS5. 环境变量设置6. 安装依赖包二、ROS及rosdep初始化问题1. 修改 sources_list.py 文件2. 修改 init.py 文件3.rosdep 初始化参考文献:一、Ubuntu 20.04LTS安装1. 设置源sudo sh -c 'echo "deb http://packag
Matlab_Robotic_Toolbox_v10.2Matlab_Robotic_Toolbox工具箱与图书Robotics, Vision & Control配套,是 Peter Corke课题组开发与维护的一个用于机器人编程与仿真的工具箱(网站http://www.petercorke.com)安装教程1. **解压工具箱**,将Matlab_Robotic_Toolbox_v10
这里写自定义目录标题目标一、D435i简介二、环境配置三、RealSense的SDK2.0安装四、ROS包安装目标在Ubuntu20.04LTS系统下安装D435i的驱动SDK2和ROS包,实现在ROS环境中使用D435i。一、D435i简介D435i是Inter公司RealSense系列摄像头的一种,采用英特尔最新的深度感应硬件和软件,封装成易于集成的产品。相比D435,D435i添加了IMU(

这里写自定义目录标题目标一、D435i简介二、环境配置三、RealSense的SDK2.0安装四、ROS包安装目标在Ubuntu20.04LTS系统下安装D435i的驱动SDK2和ROS包,实现在ROS环境中使用D435i。一、D435i简介D435i是Inter公司RealSense系列摄像头的一种,采用英特尔最新的深度感应硬件和软件,封装成易于集成的产品。相比D435,D435i添加了IMU(

目标:在Ubuntu20.04 LTS中安装OpenCV4.5.4@ 系统配置: Intel® Core™ i5-8500 CPU;Ubuntu 20.04.3 LTS安装方式由于预编译软件包安装版本比较老,所以,选择下载源程序文件CMAKE编译安装。安装依赖项1. 安装必选项:CMAKE, GCC, Python-devel和Numpy ,将用于安装配置和软件编译;sudo apt-get in