- @virdync001
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
数据,是机器人行为智能的基石。具身智能人体数据采集方案,正是为了打通“从人到机”的数据闭环,让机器人不再只是执行指令的机械体,而是具备自然表达与智能交互能力的“数字生命体”。未来,我们将持续优化数据采集与处理流程,助力机器人在更多场景中实现拟人化突破,推动具身智能迈向更广阔的未来。
在科技飞速发展的今天,动作捕捉技术已广泛应用于多个领域。但是你有没有想过,不用在身上贴一堆奇怪的标记点,就能精准捕捉到人的各种动作,甚至表情?这可不是科幻电影里的情节,它靠的就是神奇的人工智能图像识别技术。

数据,是机器人行为智能的基石。具身智能人体数据采集方案,正是为了打通“从人到机”的数据闭环,让机器人不再只是执行指令的机械体,而是具备自然表达与智能交互能力的“数字生命体”。未来,我们将持续优化数据采集与处理流程,助力机器人在更多场景中实现拟人化突破,推动具身智能迈向更广阔的未来。
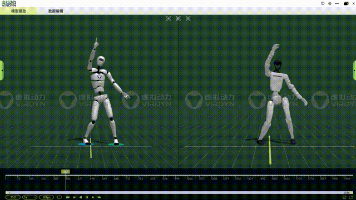
在强化学习领域,人体动捕数据前沿技术的应用的是核心突破口。通过真人穿戴专业动捕设备,可精准捕捉人体关节运动轨迹,生成高保真的原始动作数据——这类数据贴合人类自然动作逻辑,更适配机器人模仿学习与强化训练的数据需求。
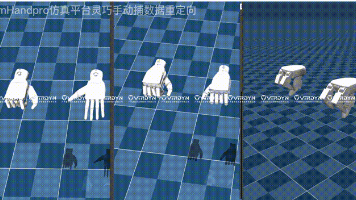
广州虚拟动力高精度惯性动捕手套mHandPro,动捕手套能够能够实时捕捉并传输手部的精细动作可实现真人在虚拟空间中自然、流畅的手部互动,为用户带来极致的沉浸式体验。可广泛应用于具身智能开发训练、VR游戏互动、虚仿真教学等领域。

基于自身在动作捕捉领域多年的技术积累与产品开发经验,面向高校机器人工程、机械工程、具身智能、自动化等专业的科研与教学场景,推出涵盖人形机器人仿真驱动与动作数据采集的实训室方案,提供全链路动捕设备与数据转化解决方案。
广州虚拟动力旗下系列动捕产品,在具身智能、灵巧手开发等领域已成功赋能多家合作单位实现产品开发与商业价值。

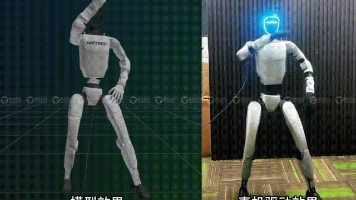
如何构建一个既符合教学要求又能激发学生无限创想的实训环境?广州虚拟动力的“AI摄像头动捕+数字人驱动”方案提供了创新路径。该方案通过集成AI视觉识别算法和数字人实时渲染技术,既可以让学生学习了解AI图像识别的基本原理,又可以亲身体验数字人驱动的奥妙。
数字人新媒体实训室解决方案,为高校提供了系统化、模块化、跨专业的实践教学平台。该方案面向数字媒体艺术、新媒体、动画制作、虚拟现实、元宇宙、新闻传媒、电子商务、游戏制作等多个专业,构建了一套贯穿数字人建模、驱动、内容生成与运营推广的全链路实训体系,助力高校打破专业壁垒,推动学科交叉融合。

具身智能(Embodied AI)是指智能体通过与环境交互实现感知、学习和决策的能力,其核心在于模拟人类或生物的形态与行为。具身智能的发展意义在于突破传统AI的局限性,使机器能够适应复杂多变的真实场景,从而在工业制造、医疗康复、家庭服务等领域发挥更大价值