
写文章




- @u014537292
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
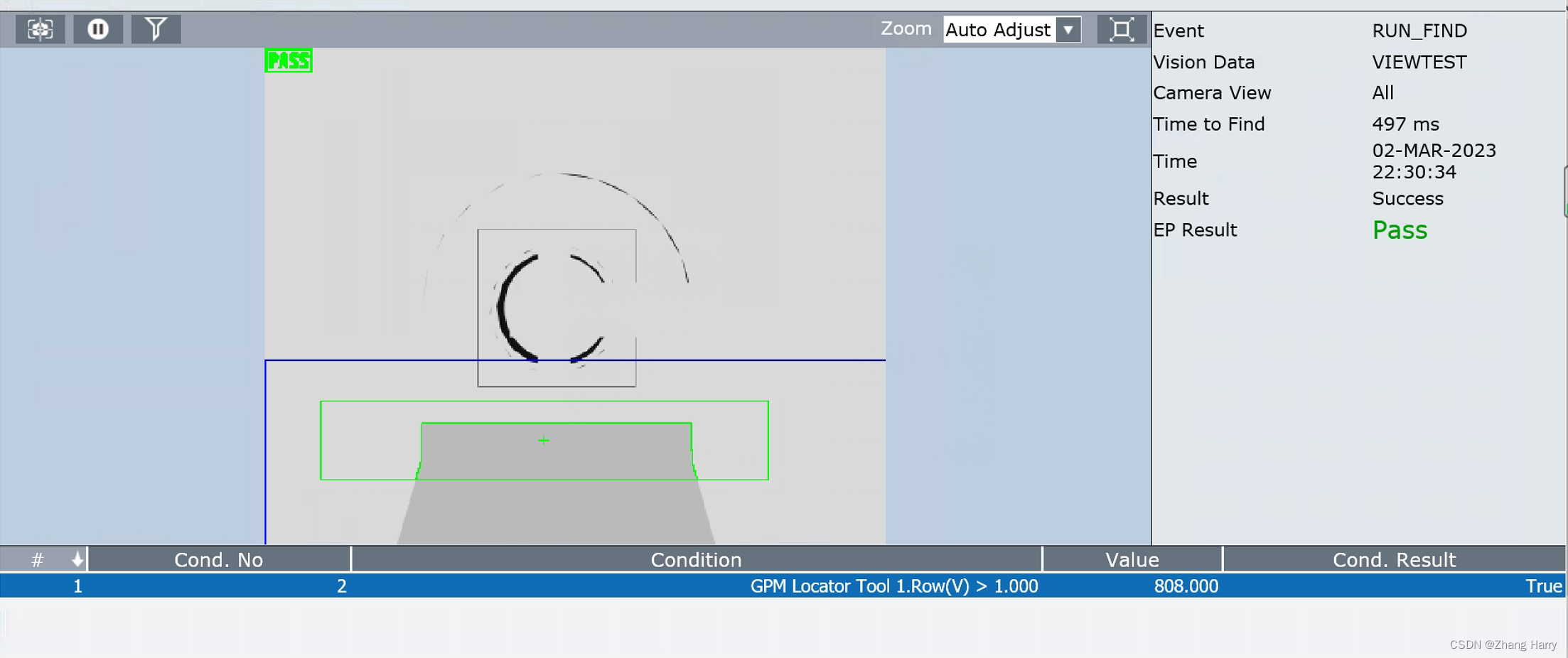
发那科机器人iRvision视觉执行履历保存到远程PC方法
该文章介绍了设置iRvision视觉执行履历保存到远程PC的文件夹的方法
发那科机器人有可能用到的系统变量总结(定期更新)
发那科机器人系统变量总结合集

发那科机器人有可能用到的系统变量总结(定期更新)
发那科机器人系统变量总结合集
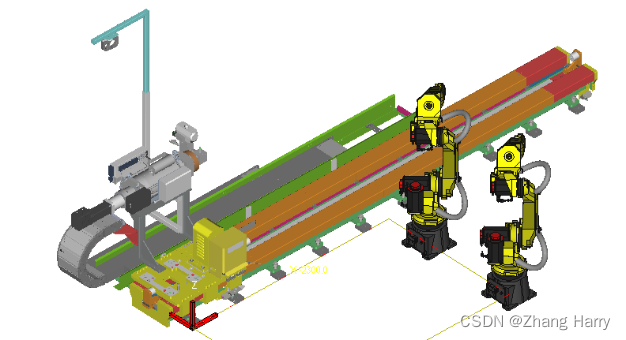
第五章 添加机器人相关设备Part1(添加机器人及导轨)
了解如何在一个工作站中添加多台发那科机器人,以及给发那科机器人配置导轨进行仿真
到底了