
写文章




- @soar3033
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
猎狗与兔子问题的Matlab编程思路与过程
有一只雄狗在B点位置发现了一只兔子在正东北方距离它200米的地方O处。此时免子开始以 8m/s的速度向正西北万亞离为 120 m 的洞口 A 全速跑去,假设猎狗在追赶兔子的时候始终朝着免于的方向全速奔跑,按要求完成下面的实验:(1)问猎狗能追上兔子的最小速度是多少,(2)选取猎狗的速度分别为 15m/s,18 m/s,计算猎狗追赶免子时跑过的路程。(3)画出猎狗追赶兔子奔跑的曲线图. 由于我们是

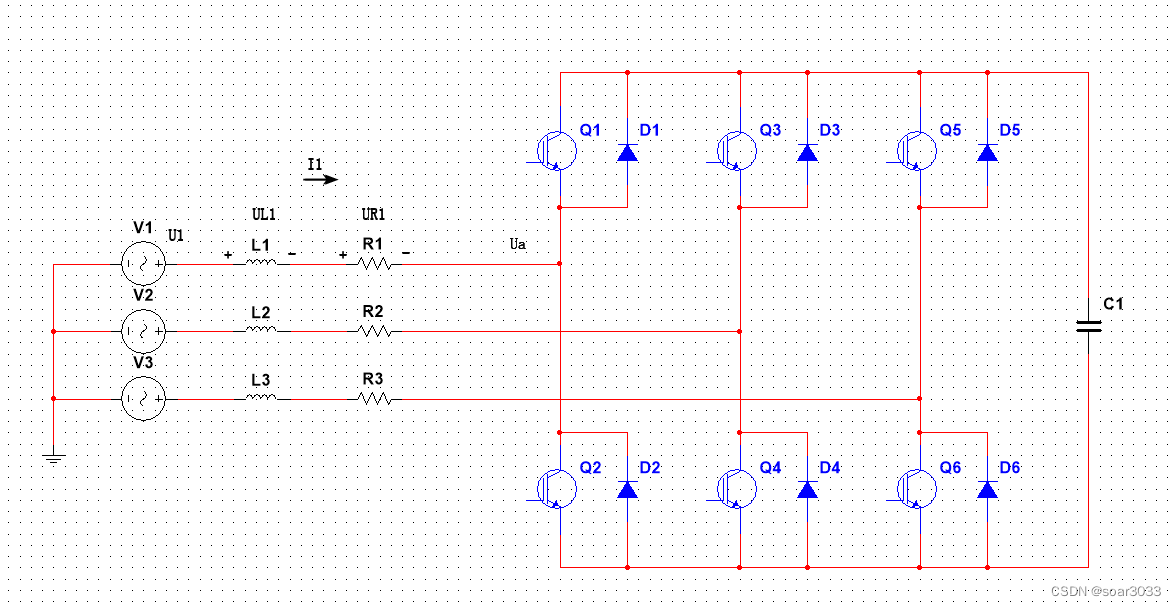
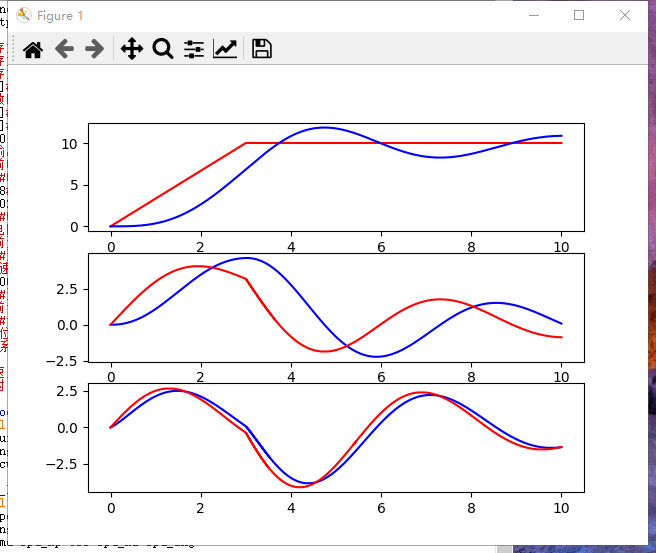
Simulink搭建三相PWM整流器过程
当直流母线电压降低低于设定的母线电压时,我们希望电网对我们的母线进行充电,也就是希望Id>0,并且母线电压低的越多Id就应该越大。相较直流母线几百伏的电压,相较电网几百伏的电压来说,UL1是很小的,如果在设计模型时忽略它只会造成很小的误差,并且控制模型中的所以在此我们忽略UL1的存在。这就是PWM整流的核心逻辑,有了核心逻辑,我们只需要将Id、Iq、Ed、Eq、实际母线电压测量出来输入到控制逻辑,
伺服控制的三环控制原理及整定仿真和Simulink模型
伺服控制的三环控制原理 我们平时使用的工业伺服,通常是成套伺服,即驱动器和电机型号存在配对关系。但有些时候,我们要用电机定转子和编码器制作非成套电机——例如机床上使用的直驱转台、永磁同步电机直接驱动的主轴。这种时候,我们需要对驱动器进行各种设置才能驱动电机。此篇文章将通过介绍伺服控制的三环控制原理入手来说明我们调式非成套伺服时需要调什么参数,为什么要这么调。 伺服电机本身是不能独立运行的,伺服
到底了