
写文章




- @quq77
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
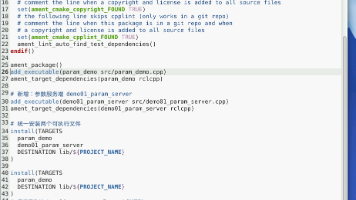
ROS2 参数服务完整实操
本文介绍了如何在ROS2环境下使用C++实现参数服务功能。参数服务是ROS2提供的全局配置共享方案,类似程序全局变量,可用于统一存储和管理机器人开发中的车辆尺寸、雷达阈值等全局配置参数。文章详细讲解了参数服务的核心概念、功能包创建步骤、服务端代码编写、CMakeLists.txt和package.xml的配置要点,以及编译运行时的常见错误解决方案。通过创建cpp04_param功能包,实现了参数服
到底了